Modeling Infrared and Combination Infrared-Microwave Heating of Foods in an Oven
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Radiant Heating with Infrared
W A T L O W RADIANT HEATING WITH INFRARED A TECHNICAL GUIDE TO UNDERSTANDING AND APPLYING INFRARED HEATERS Bleed Contents Topic Page The Advantages of Radiant Heat . 1 The Theory of Radiant Heat Transfer . 2 Problem Solving . 14 Controlling Radiant Heaters . 25 Tips On Oven Design . 29 Watlow RAYMAX® Heater Specifications . 34 The purpose of this technical guide is to assist customers in their oven design process, not to put Watlow in the position of designing (and guaranteeing) radiant ovens. The final responsibility for an oven design must remain with the equipment builder. This technical guide will provide you with an understanding of infrared radiant heating theory and application principles. It also contains examples and formulas used in determining specifications for a radiant heating application. To further understand electric heating principles, thermal system dynamics, infrared temperature sensing, temperature control and power control, the following information is also available from Watlow: • Watlow Product Catalog • Watlow Application Guide • Watlow Infrared Technical Guide to Understanding and Applying Infrared Temperature Sensors • Infrared Technical Letter #5-Emissivity Table • Radiant Technical Letter #11-Energy Uniformity of a Radiant Panel © Watlow Electric Manufacturing Company, 1997 The Advantages of Radiant Heat Electric radiant heat has many benefits over the alternative heating methods of conduction and convection: • Non-Contact Heating Radiant heaters have the ability to heat a product without physically contacting it. This can be advantageous when the product must be heated while in motion or when physical contact would contaminate or mar the product’s surface finish. • Fast Response Low thermal inertia of an infrared radiation heating system eliminates the need for long pre-heat cycles. -

Understanding Infrared Light
TEACHER/PARENT ACTIVITY MANUAL Joint Polar Satellite System Understanding Infrared Light This activity educates students about the electromagnetic spectrum, or different forms of light detected by Earth observing satellites. The Joint Polar Satellite System (JPSS), a collaborative effort between NOAA and NASA, detects various wavelengths of the electromagnetic spectrum including infrared light to measure the temperature of Earth’s surface, oceans, and atmosphere. The data from these measurements provide the nation with accurate weather forecasts, hurricane warnings, wildfire locations, and much more! Provided is a list of materials that can be purchased to complete several learning activities, including simulating infrared light by constructing homemade infrared goggles. Learning Objectives Next Generation Science Standards (Grades 5–8) Performance Disciplinary Description Expectation Core Ideas 4-PS4-1 PS4.A: • Waves, which are regular patterns of motion, can be made in water Waves and Their Wave Properties by disturbing the surface. When waves move across the surface of Applications in deep water, the water goes up and down in place; there is no net Technologies for motion in the direction of the wave except when the water meets a Information Transfer beach. (Note: This grade band endpoint was moved from K–2.) • Waves of the same type can differ in amplitude (height of the wave) and wavelength (spacing between wave peaks). 4-PS4-2 PS4.B: An object can be seen when light reflected from its surface enters the Waves and Their Electromagnetic eyes. Applications in Radiation Technologies for Information Transfer 4-PS3-2 PS3.B: Light also transfers energy from place to place. -

Far Infrared Radiation (FIR): Its Biological Effects and Medical Applications
DOI 10.1515/plm-2012-0034 Photon Lasers Med 2012; 1(4): 255–266 Review Fatma Vatansever and Michael R. Hamblin * Far infrared radiation (FIR): Its biological effects and medical applications Ferne Infrarotstrahlung: Biologische Effekte und medizinische Anwendungen Abstract am menschlichen K ö rper entwickelt werden. Spezielle Lampen und Saunas, die reine FIR-Strahlung (ohne Anteile von Nahinfrarot- und Mittelinfrarotstrahlung) Far infrared (FIR) radiation ( λ = 3 – 100 μ m) is a subdivision liefern, sind immer sicherer und effektiver geworden und of the electromagnetic spectrum that has been investi- werden verbreitet f ü r therapeutische Zwecke genutzt. gated for biological effects. The goal of this review is to Fasern, die mit FIR-emittierenden Keramik-Nanopartikeln cover the use of a further sub-division (3 – 12 μ m) of this impr ä gniert und zu Stoffen weiterverarbeitet werden, waveband, that has been observed in both in vitro and finden Verwendung als Kleidung oder Verbandsstoffe, die in vivo studies, to stimulate cells and tissue, and is consid- aufgrund der generierten FIR-Strahlung gesundheitliche ered a promising treatment modality for certain medical Vorteile bewirken k ö nnen. conditions. Technological advances have provided new techniques for delivering FIR radiation to the human body. Schl ü sselw ö rter: Ferne Infrarotstrahlung (FIR); Strah- Specialty lamps and saunas, delivering pure FIR radiation lungsw ärme; Schwarzk ö rperstrahlung; biogenetische (eliminating completely the near and mid infrared bands), Strahlen; FIR-emittierende Keramiken und Fasern; have became safe, effective, and widely used sources to Infrarotsauna. generate therapeutic effects. Fibers impregnated with FIR emitting ceramic nanoparticles and woven into fabrics, are being used as garments and wraps to generate FIR *Corresponding author: Michael R. -

Far Infrared Radiation Exposure
INTERNATIONAL COMMISSION ON NON‐IONIZING RADIATION PROTECTION ICNIRP STATEMENT ON FAR INFRARED RADIATION EXPOSURE PUBLISHED IN: HEALTH PHYSICS 91(6):630‐645; 2006 ICNIRP PUBLICATION – 2006 ICNIRP Statement ICNIRP STATEMENT ON FAR INFRARED RADIATION EXPOSURE The International Commission on Non-Ionizing Radiation Protection* INTRODUCTION the health hazards associated with these hot environ- ments. Heat strain and discomfort (thermal pain) nor- THE INTERNATIONAL Commission on Non Ionizing Radia- mally limit skin exposure to infrared radiation levels tion Protection (ICNIRP) currently provides guidelines below the threshold for skin-thermal injury, and this is to limit human exposure to intense, broadband infrared particularly true for sources that emit largely IR-C. radiation (ICNIRP 1997). The guidelines that pertained Furthermore, limits for lengthy infrared exposures would to infrared radiation (IR) were developed initially with an have to consider ambient temperatures. For example, an aim to provide guidance for protecting against hazards infrared irradiance of 1 kW mϪ2 (100 mW cmϪ2)atan from high-intensity artificial sources and to protect work- ambient temperature of 5°C can be comfortably warm- ers in hot industries. Detailed guidance for exposure to ing, but at an ambient temperature of 30°C this irradiance longer far-infrared wavelengths (referred to as IR-C would be painful and produce severe heat strain. There- radiation) was not provided because the energy at longer fore, ICNIRP provided guidelines to limit skin exposure wavelengths from most lamps and industrial infrared to pulsed sources and very brief exposures where thermal sources of concern actually contribute only a small injury could take place faster than the pain response time fraction of the total radiant heat energy and did not and where environmental temperature and the irradiated require measurement. -

Multidisciplinary Design Project Engineering Dictionary Version 0.0.2
Multidisciplinary Design Project Engineering Dictionary Version 0.0.2 February 15, 2006 . DRAFT Cambridge-MIT Institute Multidisciplinary Design Project This Dictionary/Glossary of Engineering terms has been compiled to compliment the work developed as part of the Multi-disciplinary Design Project (MDP), which is a programme to develop teaching material and kits to aid the running of mechtronics projects in Universities and Schools. The project is being carried out with support from the Cambridge-MIT Institute undergraduate teaching programe. For more information about the project please visit the MDP website at http://www-mdp.eng.cam.ac.uk or contact Dr. Peter Long Prof. Alex Slocum Cambridge University Engineering Department Massachusetts Institute of Technology Trumpington Street, 77 Massachusetts Ave. Cambridge. Cambridge MA 02139-4307 CB2 1PZ. USA e-mail: [email protected] e-mail: [email protected] tel: +44 (0) 1223 332779 tel: +1 617 253 0012 For information about the CMI initiative please see Cambridge-MIT Institute website :- http://www.cambridge-mit.org CMI CMI, University of Cambridge Massachusetts Institute of Technology 10 Miller’s Yard, 77 Massachusetts Ave. Mill Lane, Cambridge MA 02139-4307 Cambridge. CB2 1RQ. USA tel: +44 (0) 1223 327207 tel. +1 617 253 7732 fax: +44 (0) 1223 765891 fax. +1 617 258 8539 . DRAFT 2 CMI-MDP Programme 1 Introduction This dictionary/glossary has not been developed as a definative work but as a useful reference book for engi- neering students to search when looking for the meaning of a word/phrase. It has been compiled from a number of existing glossaries together with a number of local additions. -

Undersea Warfare
THE EMERGING ERA IN UNDERSEA WARFARE BRYAN CLARK www.csbaonline.org 1 The Emerging Era in Undersea Warfare Introduction U.S. defense strategy depends in large part on America’s advantage in undersea warfare. Quiet submarines are one of the U.S. military’s most viable means of gathering intelligence and pro- jecting power in the face of mounting anti-access/area-denial (A2/AD) threats being fielded by a growing number of countries. As a result, undersea warfare is an important, if not essential, element of current and future U.S. operational plans. America’s rivals worry in particular about the access submarines provide for U.S. power-projection operations, which can help offset an enemy’s numerical or geographic advantages.1 Broadly speaking, undersea warfare is the employment of submarines and other undersea sys- tems in military operations within and from the underwater domain. These missions may be both offensive and defensive and include surveillance, insertion of Special Forces, and destroy- ing or neutralizing enemy military forces and undersea infrastructure. America’s superiority in undersea warfare is the product of decades of research and develop- ment (R&D), a sophisticated defense industrial base, operational experience, and high-fidelity training. This superiority, however, is far from assured. U.S. submarines are the world’s qui- etest, but new detection techniques are emerging that do not rely on the noise a submarine makes, and that may render traditional manned submarine operations far riskier in the future. America’s competitors are likely pursuing these technologies while also expanding their own undersea forces. -

The Space Infrared Interferometric Telescope (SPIRIT): High- Resolution Imaging and Spectroscopy in the Far-Infrared
Leisawitz, D. et al., J. Adv. Space Res., in press (2007), doi:10.1016/j.asr.2007.05.081 The Space Infrared Interferometric Telescope (SPIRIT): High- resolution imaging and spectroscopy in the far-infrared David Leisawitza, Charles Bakera, Amy Bargerb, Dominic Benforda, Andrew Blainc, Rob Boylea, Richard Brodericka, Jason Budinoffa, John Carpenterc, Richard Caverlya, Phil Chena, Steve Cooleya, Christine Cottinghamd, Julie Crookea, Dave DiPietroa, Mike DiPirroa, Michael Femianoa, Art Ferrera, Jacqueline Fischere, Jonathan P. Gardnera, Lou Hallocka, Kenny Harrisa, Kate Hartmana, Martin Harwitf, Lynne Hillenbrandc, Tupper Hydea, Drew Jonesa, Jim Kellogga, Alan Koguta, Marc Kuchnera, Bill Lawsona, Javier Lechaa, Maria Lechaa, Amy Mainzerg, Jim Manniona, Anthony Martinoa, Paul Masona, John Mathera, Gibran McDonalda, Rick Millsa, Lee Mundyh, Stan Ollendorfa, Joe Pellicciottia, Dave Quinna, Kirk Rheea, Stephen Rineharta, Tim Sauerwinea, Robert Silverberga, Terry Smitha, Gordon Staceyf, H. Philip Stahli, Johannes Staguhn j, Steve Tompkinsa, June Tveekrema, Sheila Walla, and Mark Wilsona a NASA’s Goddard Space Flight Center, Greenbelt, MD b Department of Astronomy, University of Wisconsin, Madison, Wisconsin, USA c California Institute of Technology, Pasadena, CA, USA d Lockheed Martin Technical Operations, Bethesda, Maryland, USA e Naval Research Laboratory, Washington, DC, USA f Department of Astronomy, Cornell University, Ithaca, USA g Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA h Astronomy Department, University of Maryland, College Park, Maryland, USA i NASA’s Marshall Space Flight Center, Huntsville, Alabama, USA j SSAI, Lanham, Maryland, USA ABSTRACT We report results of a recently-completed pre-Formulation Phase study of SPIRIT, a candidate NASA Origins Probe mission. SPIRIT is a spatial and spectral interferometer with an operating wavelength range 25 - 400 µm. -
Infrared Photography
- 1 -De Broux et al Scott T. De Broux Katherine Kay McCaul Sheri Shimamoto January 29, 2007 Infrared Photography Physical evidence documentation through forensic photography remains one the most important aspects of crime scene investigation. Subsequent analysis of photographs will often yield clues investigators can use to reconstruct the events of an incident, or may provide the proof necessary to gain a conviction at trial. Traditional photography records images in the visible light spectrum, and typically will record on film or in a digital file that which the human eye can see. Forensic photographers are often challenged with evidence where traditional photographic techniques are unsuccessful at documenting the evidence necessary to reconcile the facts of a particular case. For years forensic photographers have had a variety of specialized techniques available for documenting evidence under challenging situations. Infrared photography can be used in a variety of these situations to gain result that could not be obtained by photographing in the visible light spectrum. Infrared techniques can be applied in the field or in a laboratory environment. In some instances the only opportunity to document the evidence is in the field at the crime scene. Until recently the only available option to the forensic photographer involved infrared techniques that used conventional film sensitive to wave lengths of light in the infrared range of the electromagnetic spectrum. Complicated workflow often made this technique difficult and expensive to utilize, and lead to underutilization of the technique. Advances in technology have now made digital imaging options available to the forensic photographer for performing infrared photography in both a field or laboratory environment. -
A Carpet Cloak Device for Visible Light
A Carpet Cloak Device for Visible Light Majid Gharghi1a, Christopher Gladden1a, Thomas Zentgraf 2, Yongmin Liu1, Xiaobo Yin1, Jason Valentine3, Xiang Zhang 1,4,* 1NSF Nanoscale Science and Engineering Center (NSEC), University of California, Berkeley 3112 Etcheverry Hall, UC Berkeley, CA 94720, USA 2Department of Physics, University of Paderborn Warburger Str. 100, 33098 Paderborn, Germany 3Department of Mechanical Engineering, Vanderbilt University VU Station B 351592, Nashville, TN 37235, USA 4Materials Science Division, Lawrence Berkeley National Laboratory, 1 Cyclotron Road, Berkeley, CA 94720, USA a These authors contributed equally to this work. *To whom correspondence should be addressed. E-mail: [email protected] ABSTRACT: We report an invisibility carpet cloak device, which is capable of making an object undetectable by visible light. The cloak is designed using quasi conformal mapping and is fabricated in a silicon nitride waveguide on a specially developed nano-porous silicon oxide substrate with a very low refractive index. The spatial index variation is realized by etching holes of various sizes in the nitride layer at deep subwavelength scale creating a local effective medium index. The fabricated device demonstrates wideband invisibility throughout the visible spectrum with low loss. This silicon nitride on low index substrate can also be a general scheme for implementation of transformation optical devices at visible frequency. KEYWORDS: Optical metamaterials, invisibility cloak, optical transformation Invisibility cloaks, a family of optical illusion devices that route electromagnetic (EM) waves around an object so that the existence of the object does not perturb light propagation, are still in their infancy. Artificially engineered materials with specific EM properties, known as metamaterials [1,2], have been used to control the propagation of EM waves, and have recently 1 been applied to cloaking through transformation optics [3-8]. -

An Infrared Invisibility Cloak Composed of Glass ͒ Elena Semouchkina,1,2,A Douglas H
APPLIED PHYSICS LETTERS 96, 233503 ͑2010͒ An infrared invisibility cloak composed of glass ͒ Elena Semouchkina,1,2,a Douglas H. Werner,2,3 George B. Semouchkin,1,2 and Carlo Pantano2,4 1Department of Electrical and Computer Engineering, Michigan Technological University, Houghton, Michigan 49931, USA 2Materials Research Institute, The Pennsylvania State University, University Park, Pennsylvania 16802, USA 3Department of Electrical Engineering, The Pennsylvania State University, University Park, Pennsylvania 16802, USA 4Department of Materials Science and Engineering, The Pennsylvania State University, University Park, Pennsylvania 16802, USA ͑Received 12 November 2009; accepted 17 May 2010; published online 7 June 2010͒ We propose to implement a nonmetallic low-loss cloak for the infrared range from identical chalcogenide glass resonators. Based on transformation optics for cylindrical objects, our approach does not require metamaterial response to be homogeneous and accounts for the discrete nature of elementary responses governed by resonator shape, illumination angle, and inter-resonator coupling. Air fractions are employed to obtain the desired distribution of the cloak effective parameters. The effect of cloaking is verified by full-wave simulations of the true multiresonator structure. The feasibility of cloak fabrication is demonstrated by prototyping glass grating structures with the dimensions characteristic for the cloak resonators. © 2010 American Institute of Physics. ͓doi:10.1063/1.3447794͔ 1,2 Recent work on transformation optics has revealed a MICROWAVE STUDIO. The best results were obtained for cy- path toward creating an invisibility cloak from metamaterials lindrical resonators with diameters twice as large as their with a prescribed spatial dispersion of effective parameters, height, which supported magnetic moments along their axes in particular, with radial dispersion of the cloak effective at incidence angles ranging between 15° and 90°. -
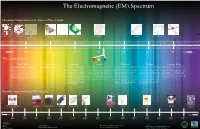
Radio Waves: Microwaves: Infrared: Visible: Ultraviolet: X-Rays: Gamma
The Electromagnetic (EM) Spectrum Hawaiian Comparisons to the Sizes of Wavelengths: Aloha Tower Aloha Stadium Hale Kamehameha Point of a Needle Plant Cell Bacteria Protein Water Molecule Atom (Hawaiian House) Butterfly 3 -2 -5 -6 -8 -10 -12 Longer 10 10 10 10 10 10 10 Shorter Wavelength (Meters): Radio Waves: Microwaves: Infrared: Visible: Ultraviolet: X-Rays: Gamma Rays: Radio waves have the longest wavelength in the EM Since microwaves can penetrate haze, light Infrared light has a range of wavelengths Visible light waves are the only waves in spec- Ultraviolet light is invisible to the human As the wavelengths of the spectrum de- Gamma rays have the smallest wavelength, spectrum. As implied, radio waves bring music to ra- rain, snow, clouds and smoke, these waves like visible light. “Near infrared” light is trum that humans can see. These waves are eyes, but some insects, like bumblebees, have crease, the energy increases, such as how but have the most energy out of all of the other dios, but they also provide signals to cell phones, tele- are ideal for viewing the Earth from space. closest in wavelength to visible light and seen in a range of colors with red having the proven to be able to see ultraviolet light. The x-rays tend to act more like a particle than waves in the spectrum. These waves are gener- visions, etc. Radio waves are received at an estimate The wavelength of micro waves in a mi- “far infrared” is closer to the microwave re- longest wavelength and violet (purple) having ultraviolet part of the spectrum is divided into a wave. -

An Evolvable Space Telescope for the Far Infrared Surveyor Mission
An Evolvable Space Telescope for the Far Infrared Surveyor Mission C. F. Lilliea, R.S. Polidanb J. B. Breckinridgec, H. A. MacEwend, M. R. Flanneryb and D. R. Daileyb aLillie Consulting LLC, bNorthrop Grumman Aerospace Systems, cBreckinridge Associates LLC, dReviresco LLC 1. Introduction and overview In an era of flat NASA budgets, we need to find more affordable ways to build large space telescopes. We believe the root cause for the delay or cancellation of a Flagship class mission is the annual cost of the mission. When development costs consume too large a share of the annual NASA budget it threatens all other missions, and the science community and NASA must consider drastic measures to reduce the annual cost of the Flagship mission: i.e., schedule extension, down-sizing or cancellation. To be affordable, future flagship observatories must identify and implement new technology AND new development concepts, as well as providing the greatly improved resolution and light collecting power necessary to answer cutting-edge science questions. We have been studying observatory architectures where the design, development, construction, and launch of the future large space telescope will be conducted in several stages, each providing a complete telescope fully capable of forefront scientific observations. One approach to building future large space observatories that is intended to break the cost curve and enable large (>10 m) telescopes to be developed within a flat NASA budget is an Evolvable Space Telescope (Proc. SPIE 9143-40, Space Telescopes and Instrumentation, 2014). Stage 1 would form the core of the observatory and provide a major improvement over existing observatories operating at the planned launch date.