Waves on Wood
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Manufacuting Technology
ME 6402 -Manufacturing Technology - II IV Sem / II Year B.E. (Mechanical Engineering) Department of Mechanical Engineering R.M.K.ENGINEERINGCOLLEGE R.S.M. Nagar, Kavaraipettai – 601 206. UNIT I - THEORY OF METAL CUTTING INTRODUCTION: CUTTING TOOL: SINGLE POINT CUTTING TOOL: NOMENCLATURE SINGLE POINT TOOL: MECHANICS OF METAL CUTTING: TYPES OF CHIPS: COOLANT OR CUTTING FLUIDS OR EMULSIONS: FUNCTIONS OR USES OF COOLANTS OR CUTTING FLUIDS: TYPICAL PROPERTIES OF TOOL MATERIALS: ------------------------------X-------------------------------- UNIT-II - CENTRE LATHE AND SPECIAL PURPOSE LATHE INTRODUCTION: TYPES OF LATHE: SPEED LATHE: CENTRE LATHE OR ENGINE LATHE: BENCH LATHE: TOOL ROOM LATHE: CAPSTAN AND TURRET LATHE: SPECIAL PURPOSE LATHE: AUTOMATIC LATHE: CONSTRUCTION OF LATHE MACHINE: BED: HEAD STOCK: TAIL STOCK: CARRIAGE: THREAD CUTTING MECHANISM: ACCESSORIES AND ATTACHMENTS OF LATHE: SPECIFICATION OF LATHE: LATHE OPERATIONS: TAPERS AND TAPER TURNING: TAPER TURNING BY SWIVELLING THE COMPOUND REST: TAPER TURNING ATTACHMENT METHOD: TAPER TURNING WITH TAILSTOCK SET OVER METHOD: FORM TOOL METHOD: TAPER TURNING WITH DOUBLE HEADS: THREAD CUTTING: DRILLING ON A LATHE: CUTTING SPEED: FEED: ---------------------------X------------------------------ UNIT-III, OTHER MACHINE TOOLS DRILLING INTRODUCTION: CONSTRUCTION OF DRILLING MACHINE: TYPES OF DRILLING MACHINE: PORTABLE DRILLING MACHINE: SENSITIVE DRILLING MACHINE: UPRIGHT DRILLING MACHINE: RADIAL DRILLING MACHINE: GANG DRILLING MACHINE: MULTIPLE-SPINDLE DRILLING MACHINE: TYPES OF DRILLS: TWIST DRILL -
Screw Threads and Tap-Drill Sizes
CS24-43 Screw Threads and Tap-Drill Sizes U. S. DEPARTMENT OF COMMERCE JESSE H. JONES, Secretary NATIONAL BUREAU OF STANDARDS LYMAN J. BRIGGS, Director SCREW THREADS AND TAP-DRILL SIZES COMMERCIAL STANDARD CS24-43 (Revision and consolidation of CS24”30 and CS25-30) Effective Date for New Production from February 10, 1943 A RECORDED VOLUNTARY STANDARD OF THE TRADE UNITED STATES GOVERNMENT PRINTING OFFICE WASHINGTON : 1943 For sale by the Superintendent of Documents, U. S. Government Printing Office Washington 25, D. C. - Price 15 cents U. S. Department of Commerce National Bureau of Standards PROMULGATION of COMMERCIAL STANDARD CS24-43 for SCREW THREADS AND TAP-DRILL SIZES (Revision and consolidation of CS24-30 and CS25-30) At the request of the National Screw Thread Commission, American National screw-thread tables for shop use were circulated January 23, 1930, as recommended commercial standards to producers, distri- butors, and users for a written acceptance. They were subsequently accepted in writing by the industry and published under the titles, American National Standard Screw Threads, Coarse and Fine-Thread Series, Commercial Standard CS24-30; and American National Special Screw Threads, Commercial Standard CS25-*30. On July 28, 1942, on the recommendation of the Interdepartmental Screw Thread Committee, and with the endorsement of the standing committee, a consolidation and revision of CS24-30 and CS25-30, under the title of Recommended Commercial Standard for Screw Threads and Tap-Drill Sizes, was circulated for acceptance. Those concerned have since accepted and approved the standard as shown herein for promulgation by the United States Department of Com- merce, through the National Bureau of Standards. -

Gear Cutting Tools Rua André De Leão 155 Bloco a Mexiko/Mexico [email protected] CEP: 04672-030 LMT Boehlerit S.A
Belgien/Belgium Indien/India Türkei/Turkey SA LMT Fette NV LMT Fette India Pvt. Ltd. Böhler Sert Maden Takim Sanayi Belin Yvon S.A. Industrieweg 15 B2 29, II Main Road ve Ticaret A.S. F-01590 Lavancia, Frankreich 1850 Grimbergen Gandhinagar, Adyar Ankara Asfalti ü zeri No.22 Tel. +33 (0) 4 74 75 89 89 Fon +32-2/2 51 12 36 Chennai 600 020 Kartal 81412 Fax +33 (0) 4 74 75 89 90 Fax +32-2/2 51 74 89 Fon +91-44/24 405 136 / 137 Istanbul E-mail: [email protected] Fax +91-44/24 405 1205 P.K. 167 Internet: www.belin-y.com Brasilien/Brazil [email protected] Fon +90-216/3 06 65 70 LMT Böhlerit LTDA. Fax +90-216/3 06 65 74 Gear Cutting Tools Rua André de Leão 155 Bloco A Mexiko/Mexico [email protected] CEP: 04672-030 LMT Boehlerit S.A. de C.V. • Hobbing Socorro-Santo Amaro Ungarn/Hungary Bilz Werkzeugfabrik GmbH & Co. KG Matias Romero No. 1359 • Gear Milling Vogelsangstraße 8 São Paulo Col. Letran Valle LMT Boehlerit KFT. D-73760 Ostfildern, Deutschland Fon +55/11 55 46 07 55 03650 Mexico D.F. Kis-Duma U.6 Tel. +49 (0) 711 3 48 01-0 Fax +55/11 55 46 04 76 Fon +52 (55) 56 05 82 77 PoBox 2036 Erdliget Pf. 32 Fax +49 (0) 711 3 48 12 56 [email protected] Fax +52 (55) 56 05 85 01 2030 Erd E-mail: [email protected] [email protected] Fon +36/23 52 19 10 Internet: www.bilz.de China Fax +36/23 52 19 14 Leitz Tooling Systems Österreich/Austria [email protected] (Nanjing) Co. -

STANDARD OPERATING PROCEDURES for COMMON
Faculty of Engineering Workshop Services STANDARD OPERATING PROCEDURES for COMMON TOOL & MACHINING EQUIPMENT [Type here] [Type here] [Type here] The information in this booklet is provided as a guide for the minimum safety training that shall be provided to personnel prior to being authorized to use of any of the following machining tools or pieces of equipment: Mill, Lathe, Planer, Drill Press, Pedestal Grinder, & Band Saw. GENERAL SAFETY TIPS • Safety glasses with side shields must be worn at all times. • Do not wear loose clothing, loose neckwear or exposed jewelry while operating machinery. • Do not work alone in a machine shop. (Implement the "buddy" system.) • Long sleeves on shirts should be rolled up above the elbows. • Pull back and secure long hair. • Do not wear thin fabric shoes, sandals, open-toed shoes, and high-heeled shoes. • A machinist's apron tied in a quick release manner should be worn. • Always keep hands and other body parts a safe distance away from moving machine parts, work pieces, and cutters. • Use hand tools for their designed purposes only. • Report defective machinery, equipment or hand tools to the Technician. McGill Workshop Safety policy: www.mcgill.ca/ehs/programs-and-services/workshop Workshop Rules: www.mcgill.ca/ehs/programs-and-services/workshop/rules [Type here] [Type here] [Type here] FACULTY WORKSHOP SERVICES Safe Use of Machine Shop Equipment MACHINE SHOP SAFETY Machine Shop Safety August 2014 1 FACULTY WORKSHOP SERVICES Safe Use of Machine Shop Equipment WORKSHOP MACHINES - LATHE • All stock must be properly secured in the lathe chuck or mounted prior to the machining process taking place. -
Planing Machine
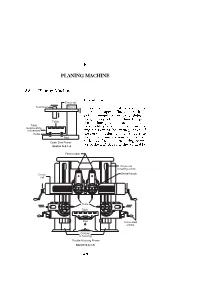
PLANING MACHINE A Planing Machine tro duction Cross-rail In Tool head Column This is also a recipro cating typ e of ma chine like shap er The table with T slots for mounting workpiece slides in the guideways of the machine b ed past Table the stationary to ol head The to ol Table holding the to ol machines du reciprocating head the forward or cutting stroke of movement ring orktable during the cutting stroke Roller the w to ol remains stationary The to ol Bed the tal feed is given during return Open Side Planer horizon backward strokeof the worktable Sketch S-8.1-A or Feed screws Cross-rail elevating screw Cross- Swivel heads rail Tools Table Bed Cross-feed cranks Column or housing Double Housing Planer Sketch S-8.1-B Planing Machine Divided Table Planer In this typ e of planer the table on the bed is divided into two parts it may b e recipro cated separately or together This typ e is mostly suitable for continuous pro duction and thus reduces the machining time by saving the idle time One of the table is used for setting up large number of identical workpieces while the other one recipro cates against the stationary cutting to ol machining the workpieces Both the tables may clamp together for holding large and heavy workpiece and can also recipro cate together under the to ol A Table Drive Mechanism The table recipro cates in the guideways on the machine b ed The mechanism used to drive the table is mainly by gear drive and the reversible mechanism is adopted byany of the following ways a By having an op en and cross b elt drive -

Schmidt Catalog
NEW WE BUILD INTO EVERY TOOL WE SELL THE KNOW TABS FIND EASY - HOW AND PRECISION TO GET YOUR JOB DONE RIGHT Quality TOOLING FOR Woodworking Tools And SHAPERS Accessories MOULDERS, Since 1926 TENONERS PLANERS, SAWS CNC ROUTERS, HAUNCHERS More Tools More Solutions More Cutters, Heads, Solid Carbide Spirals and Knives throughout this expanded edition CATALOG NO. 1200 We Give Expert Technical Assistance To Help You Get the Right Tool To Fit Every Need and Specification YOU HAVE A TEAM OF PROBLEM SOLVERS AT SCHMIDT The people you talk to are experienced pros in the custom woodworking tool industry who can put their training and knowledge to work for you. Count on any one of the Schmidt team to tackle your production and engineering problems and meet your special manufacturing needs. TECHNICAL & PERSONEL Rick Paul Joe De Cotiis Jay Oliva James Mirarchi Rick Paul Jr. President Operations Manager Stock & Custom Sales Tooling Design & Sales and Product Head Drafter Developement [email protected] [email protected] [email protected] [email protected] [email protected] When it comes to experience, we’re excel at understanding and servicing It all adds up. Top quality in a class by ourselves. your unique woodworking problem. Products. In-depth service •When you call for service you talk •We can manufacture tools for most to the seasoned experts in charge, woodworking machines to meet and experience. Technical dedicated Schmidt Sales Engineers unusual requirements. innovation. It’s what makes with over 100 years total experience. •Schmidt offers the most versatile Schmidt a leader in the •We have expert skill and under- design and manufacture of wing industry. -

Prevailing Wage Rates for Cook County Effective Sept. 1, 2017
Prevailing Wage rates for Cook County effective Sept. 1, 2017 Trade Title Region Type Class Base Fore- M-F OSA OSH H/W Pension Vacation Training Wage man OT Wage ASBESTOS ABT-GEN ALL ALL 41.20 42.20 1.5 1.5 2 14.65 12.32 0.00 0.50 ASBESTOS ABT-MEC ALL BLD 37.46 39.96 1.5 1.5 2 11.62 11.06 0.00 0.72 BOILERMAKER ALL BLD 48.49 52.86 2 2 2 6.97 19.61 0.00 0.90 BRICK MASON ALL BLD 45.38 49.92 1.5 1.5 2 10.45 16.68 0.00 0.90 CARPENTER ALL ALL 46.35 48.35 1.5 1.5 2 11.79 18.87 0.00 0.63 CEMENT MASON ALL ALL 44.25 46.25 2 1.5 2 14.00 17.16 0.00 0.92 CERAMIC TILE FNSHER ALL BLD 38.56 38.56 1.5 1.5 2 10.65 11.18 0.00 0.68 COMM. ELECT. ALL BLD 43.10 45.90 1.5 1.5 2 8.88 13.22 1.00 0.85 ELECTRIC PWR EQMT OP ALL ALL 50.50 55.50 1.5 1.5 2 11.69 16.69 0.00 3.12 ELECTRIC PWR GRNDMAN ALL ALL 39.39 55.50 1.5 1.5 2 9.12 13.02 0.00 2.43 ELECTRIC PWR LINEMAN ALL ALL 50.50 55.50 1.5 1.5 2 11.69 16.69 0.00 3.12 ELECTRICIAN ALL ALL 47.40 50.40 1.5 1.5 2 14.33 16.10 1.00 1.18 ELEVATOR CONSTRUCTOR ALL BLD 51.94 58.43 2 2 2 14.43 14.96 4.16 0.90 FENCE ERECTOR ALL ALL 39.58 41.58 1.5 1.5 2 13.40 13.90 0.00 0.40 GLAZIER ALL BLD 42.45 43.95 1.5 1.5 2 14.04 20.14 0.00 0.94 HT/FROST INSULATOR ALL BLD 50.50 53.00 1.5 1.5 2 12.12 12.96 0.00 0.72 IRON WORKER ALL ALL 47.33 49.33 2 2 2 14.15 22.39 0.00 0.35 LABORER ALL ALL 41.20 41.95 1.5 1.5 2 14.65 12.32 0.00 0.50 LATHER ALL ALL 46.35 48.35 1.5 1.5 2 11.79 18.87 0.00 0.63 MACHINIST ALL BLD 47.56 50.06 1.5 1.5 2 7.05 8.95 1.85 1.47 MARBLE FINISHERS ALL ALL 33.95 33.95 1.5 1.5 2 10.45 15.52 0.00 0.47 MARBLE MASON ALL BLD -

16-Inch Planer Model JWP-16OS
Operating Instructions and Parts Manual 16-inch Planer Model JWP-16OS WALTER MEIER (Manufacturing) Inc. 427 New Sanford Road LaVergne, TN 37086 Part No. M-708531 Ph.: 800-274-6848 Revision B 02/2010 www.waltermeier.com Copyright © 2010 Walter Meier (Manufacturing) Inc. 1 Warranty and Service Walter Meier (Manufacturing) Inc., warrants every product it sells. If one of our tools needs service or repair, one of our Authorized Service Centers located throughout the United States can give you quick service. In most cases, any of these Walter Meier Authorized Service Centers can authorize warranty repair, assist you in obtaining parts, or perform routine maintenance and major repair on your JET® tools. For the name of an Authorized Service Center in your area call 1-800-274-6848. MORE INFORMATION Walter Meier is consistently adding new products to the line. For complete, up-to-date product information, check with your local Walter Meier distributor, or visit waltermeier.com. WARRANTY JET products carry a limited warranty which varies in duration based upon the product (MW = Metalworking, WW = Woodworking). WHAT IS COVERED? This warranty covers any defects in workmanship or materials subject to the exceptions stated below. Cutting tools, abrasives and other consumables are excluded from warranty coverage. WHO IS COVERED? This warranty covers only the initial purchaser of the product. WHAT IS THE PERIOD OF COVERAGE? The general JET warranty lasts for the time period specified in the product literature of each product. WHAT IS NOT COVERED? Five Year Warranties do not cover woodworking (WW) products used for commercial, industrial or educational purposes. -
2016 Prevailing Wage Rates Elko County
2016 PREVAILING WAGE RATES ELKO COUNTY DATE OF DETERMINATION: October 1, 2015 APPLICABLE FOR PUBLIC WORKS PROJECTS BID/AWARDED OCTOBER 1, 2015 THROUGH SEPTEMBER 30, 2016* *Pursuant to NAC 338.040(3), "After a contract has been awarded, the prevailing rates of wages in effect at the time of the opening of bids remain in effect for the duration of the project." As Amendments/Addenda are made to the wage rates, such will be posted to sites of the respective counties. Please review regularly for any amendments posted or contact our offices directly for further assistance with any amendments to the rates. AIR BALANCE TECHNICIAN ALARM INSTALLER BOILERMAKER BRICKLAYER CARPENTER CEMENT MASON ELECTRICIAN-COMMUNICATION TECH. ELECTRICIAN-LINE ELECTRICIAN-NEON SIGN ELECTRICIAN-WIREMAN ELEVATOR CONSTRUCTOR FENCE ERECTOR FLAGPERSON FLOOR COVERER GLAZIER HIGHWAY STRIPER HOD CARRIER-BRICK MASON HOD CARRIER-PLASTERER TENDER IRON WORKER LABORER MECHANICAL INSULATOR 2015-2016 Prevailing Wage Rates - Elko County 1 MILLWRIGHT OPERATING ENGINEER OPERATING ENG. STEEL FABRICATOR/ERECTOR OPERATING ENGINEER-PILEDRIVER PAINTER PILEDRIVER (NON-EQUIPMENT) PLASTERER PLUMBER/PIPEFITTER REFRIGERATION ROOFER (Does not include sheet metal roofs) SHEET METAL WORKER SPRINKLER FITTER SURVEYOR (NON-LICENSED) TAPER TILE /TERRAZZO WORKER/MARBLE MASON TRAFFIC BARRIER ERECTOR TRUCK DRIVER WELL DRILLER LUBRICATION AND SERVICE ENGINEER (MOBILE AND GREASE RACK) SOIL TESTER (CERTIFIED) SOILS AND MATERIALS TESTER PREVAILING WAGE RATES INCLUDE THE BASE RATE AS WELL AS ALL APPLICABLE FRINGES NRS 338.010(21) “Wages” means: (a) The basic hourly rate of pay; and (b) The amount of pension, health and welfare, vacation and holiday pay, the cost of apprenticeship training or other similar programs or other bona fide fringe benefits which are a benefit to the workman. -
Programs. Accompanied by Illugfrationslearning
.4* DOCUMENT RESUME- ED 213 858 CE 031 481 . Machine and Woodworking Tool Safety. Module SH-24., T ITLE c , Safety and Health. ITUTION Center for Occupational Researchand,Developmen t, Ine., Waco, Tex. SPONS AGENCY bffice of Vocational and Adult Education (ED). Washington, DC. Div. of National Vocational Programs. PUB DATE 81 CONTRACT- 300-79-0709 NOTE= 51p.; For.re,lAted documents see CE031'450-507. AVAILABLE FROMThe Center for Occupational Research andDevelopment, . 601 Lake Air Dr., Suite C,Waco,ja,76710 (Instructor Guides, $9.75 each; Learning Modules, $3.00 each. Entire set of Learning Modules ayailable, at two subsets": SH-21, SK -41, SH-43, SH-45, and SH-48, $12.00; remaining 45 modules, $97.50). EDRS PRICE MF01 Plus Postage. PC Not Available from EDRS. DEStRIPTORS Behavioral Objectives; *Equipment Utilization; / *Health Education; Learning Activities;Learning Modules; *Machine Tools; Postsecondary Education; *Safely EdUcation; Secondary Education;*vocational , Education; *Woodworking IDENTIFIERS *Occupational. Safety and Health . A /- . A BSTRACT . , This student module on machine andwoodworking tool Safety is one of 50 modules concerned W. hjob safety end health. This module discusses specific ptaGtic ,precautions concerned with the efficient operation and useolli6machine and woodworking tools in use today. Following theintroduction,. 13 objectives (each keyed_to a page in the text) the studentis expected to accomplish are listed (e.g., Cite'nine general safety rules that apply to all machine tools). Then each objective is taughtin detail, sometimes accompanied by illugfrationsLearningactivities are. included. A 7,-* .list of references and answers tolearning activities complete the ,.. module. (CT) .1 .111M11.. ******************A****************************************i******** .* Reproductions supplied bY EDRS are the bestthat can be made from the original document; ********************************************************************* 1IFETY AND HEALTH MACHINE AND WOODWORKING TOOL SAFETY .,:: ? ; ,1. -

Lathe and Planer Tools Fourth Revised and Enlarged Edition Standard Shop Tools and Their Use Cutting Speeds and Feeds
!5 CENTS LATHE AND PLANER TOOLS FOURTH REVISED AND ENLARGED EDITION STANDARD SHOP TOOLS AND THEIR USE CUTTING SPEEDS AND FEEDS MACHINERY'S REFERENCE BOOR NO. 7 PUBLISHED BY MACHINERY, NEW YORK MACHINERY'S REFERENCE SERIES EACH NUMBER IS A UNIT IN A SERIES ON ELECTRICAL AND STEAM ENGINEERING DRAWING AND MACHINE DESIGN AND SHOP PRACTICE NUMBER 7 LATHE AND PLANER TOOLS FOURTH REVISED EDITION CONTENTS Cutting Tools for Planer and Lathe, by W. J. KAUP - 3 Boring Tools, by W. J. KAUP - - 11 Forging Lathe Boring Tools, by J. F. SALLOWS - - 17 Shape of Standard Shop Tools - - 20 Cutting Speeds and Feeds for Lathe Tools - - 29 Straight and Circular Forming Tools, by Jos. M. STABEL and GEO. D. HAYDEN - - - - 34 Copyright, 1912, The Industrial Press, Publishers of MACHINERY. 49-55 Lafayette Street, New York City . , CHAPTER I CUTTING TOOLS FOR PLANER AND LATHE* In discussing cutting tools for the planer and lathe, planer tools will first come under our notice as being the simplest and requiring the least skill in setting. Every mechanic has doubtless observed that if the chip be unwound from the spiral shape it assumes in leav- ing the tool, and projected in a straight line, it is shorter than the surface from which it came. This is due mainly to the compression of the metal in the direction of the cut, and the possibilities of saving power and strain upon the machine by giving proper cutting angles to the tools and reducing this compression to a minimum is thua realized. Bake of Planer Tools In Fig. -

15-Inch Thickness Planer Model JWP-15DX
Operating Instructions and Parts Manual 15-inch Thickness Planer Model JWP-15DX WMH TOOL GROUP 2420 Vantage Drive Elgin, Illinois 60124 Part No. M-708538 Ph.: 800-274-6848 Revision A1 8/06 www.wmhtoolgroup.com Copyright © WMH Tool Group WARRANTY AND SERVICE WMH Tool Group, Inc., warrants every product it sells. If one of our tools needs service or repair, one of our Authorized Service Centers located throughout the United States can give you quick service. In most cases, any of these WMH Tool Group Authorized Service Centers can authorize warranty repair, assist you in obtaining parts, or perform routine maintenance and major repair on your JET® tools. For the name of an Authorized Service Center in your area call 1-800-274-6848. MORE INFORMATION WMH Tool Group is consistently adding new products to the line. For complete, up-to-date product information, check with your local WMH Tool Group distributor, or visit jettools.com. WARRANTY JET products carry a limited warranty which varies in duration based upon the product (MW = Metalworking, WW = Woodworking). WHAT IS COVERED? This warranty covers any defects in workmanship or materials subject to the exceptions stated below. Cutting tools, abrasives and other consumables are excluded from warranty coverage. WHO IS COVERED? This warranty covers only the initial purchaser of the product. WHAT IS THE PERIOD OF COVERAGE? The general JET warranty lasts for the time period specified in the product literature of each product. WHAT IS NOT COVERED? Five Year Warranties do not cover woodworking (WW) products used for commercial, industrial or educational purposes.