Translation Series No. 2348
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

5892 Cisco Category: Standards Track August 2010 ISSN: 2070-1721
Internet Engineering Task Force (IETF) P. Faltstrom, Ed. Request for Comments: 5892 Cisco Category: Standards Track August 2010 ISSN: 2070-1721 The Unicode Code Points and Internationalized Domain Names for Applications (IDNA) Abstract This document specifies rules for deciding whether a code point, considered in isolation or in context, is a candidate for inclusion in an Internationalized Domain Name (IDN). It is part of the specification of Internationalizing Domain Names in Applications 2008 (IDNA2008). Status of This Memo This is an Internet Standards Track document. This document is a product of the Internet Engineering Task Force (IETF). It represents the consensus of the IETF community. It has received public review and has been approved for publication by the Internet Engineering Steering Group (IESG). Further information on Internet Standards is available in Section 2 of RFC 5741. Information about the current status of this document, any errata, and how to provide feedback on it may be obtained at http://www.rfc-editor.org/info/rfc5892. Copyright Notice Copyright (c) 2010 IETF Trust and the persons identified as the document authors. All rights reserved. This document is subject to BCP 78 and the IETF Trust's Legal Provisions Relating to IETF Documents (http://trustee.ietf.org/license-info) in effect on the date of publication of this document. Please review these documents carefully, as they describe your rights and restrictions with respect to this document. Code Components extracted from this document must include Simplified BSD License text as described in Section 4.e of the Trust Legal Provisions and are provided without warranty as described in the Simplified BSD License. -

Kyrillische Schrift Für Den Computer
Hanna-Chris Gast Kyrillische Schrift für den Computer Benennung der Buchstaben, Vergleich der Transkriptionen in Bibliotheken und Standesämtern, Auflistung der Unicodes sowie Tastaturbelegung für Windows XP Inhalt Seite Vorwort ................................................................................................................................................ 2 1 Kyrillische Schriftzeichen mit Benennung................................................................................... 3 1.1 Die Buchstaben im Russischen mit Schreibschrift und Aussprache.................................. 3 1.2 Kyrillische Schriftzeichen anderer slawischer Sprachen.................................................... 9 1.3 Veraltete kyrillische Schriftzeichen .................................................................................... 10 1.4 Die gebräuchlichen Sonderzeichen ..................................................................................... 11 2 Transliterationen und Transkriptionen (Umschriften) .......................................................... 13 2.1 Begriffe zum Thema Transkription/Transliteration/Umschrift ...................................... 13 2.2 Normen und Vorschriften für Bibliotheken und Standesämter....................................... 15 2.3 Tabellarische Übersicht der Umschriften aus dem Russischen ....................................... 21 2.4 Transliterationen veralteter kyrillischer Buchstaben ....................................................... 25 2.5 Transliterationen bei anderen slawischen -

Marathon County Environmental Resources Committee Agenda
MARATHON COUNTY ENVIRONMENTAL RESOURCES COMMITTEE AGENDA Date & Time of Meeting: Tuesday, February 2, 2021 at 3:00 p.m. Meeting Location: 212 River Drive, Room 5 Wausau 54403 Committee Members: Jacob Langenhahn - Chair ; Sara Guild, -Vice-chair; Rick Seefeldt, Allen Drabek, Bill Conway, Randy Fifrick, Arnold Schlei, Dave Oberbeck, Eric Vogel - FSA Member, Marilyn Bhend – WI Towns & Villages Association (non-voting member) Marathon County Mission Statement: Marathon County Government serves people by leading, coordinating, and providing county, regional, and statewide initiatives. It directly or in cooperation with other public and private partners provides services and creates opportunities that make Marathon County and the surrounding area a preferred place to live, work, visit, and do business. (Last updated 12-20-05). Environmental Resources Committee Mission Statement: Provide leadership for the implementation of the County Strategic Plan, monitoring outcomes, reviewing and recommending to the County Board policies related to environmental resource initiatives of Marathon County. (Revised: 04/17/12) Strategic Plan Goals 2018 - 2022: Objective 5.2 - Promote sound land use decisions that conserve and preserve natural resources in decisions with economic development and growth. Objective 6.3 - Protect and enhance the quantity and quality of potable groundwater and potable surface water supplies. The meeting site identified above will be open to the public. However, due to the COVID-19 pandemic and associated public health directives, Marathon County encourages (Committee/Board/Commission) members and the public to attend this meeting remotely. To this end, instead of attendance in person, (Committee/Board/Commission) members and the public may attend this meeting by telephone conference. -

1 Symbols (2286)
1 Symbols (2286) USV Symbol Macro(s) Description 0009 \textHT <control> 000A \textLF <control> 000D \textCR <control> 0022 ” \textquotedbl QUOTATION MARK 0023 # \texthash NUMBER SIGN \textnumbersign 0024 $ \textdollar DOLLAR SIGN 0025 % \textpercent PERCENT SIGN 0026 & \textampersand AMPERSAND 0027 ’ \textquotesingle APOSTROPHE 0028 ( \textparenleft LEFT PARENTHESIS 0029 ) \textparenright RIGHT PARENTHESIS 002A * \textasteriskcentered ASTERISK 002B + \textMVPlus PLUS SIGN 002C , \textMVComma COMMA 002D - \textMVMinus HYPHEN-MINUS 002E . \textMVPeriod FULL STOP 002F / \textMVDivision SOLIDUS 0030 0 \textMVZero DIGIT ZERO 0031 1 \textMVOne DIGIT ONE 0032 2 \textMVTwo DIGIT TWO 0033 3 \textMVThree DIGIT THREE 0034 4 \textMVFour DIGIT FOUR 0035 5 \textMVFive DIGIT FIVE 0036 6 \textMVSix DIGIT SIX 0037 7 \textMVSeven DIGIT SEVEN 0038 8 \textMVEight DIGIT EIGHT 0039 9 \textMVNine DIGIT NINE 003C < \textless LESS-THAN SIGN 003D = \textequals EQUALS SIGN 003E > \textgreater GREATER-THAN SIGN 0040 @ \textMVAt COMMERCIAL AT 005C \ \textbackslash REVERSE SOLIDUS 005E ^ \textasciicircum CIRCUMFLEX ACCENT 005F _ \textunderscore LOW LINE 0060 ‘ \textasciigrave GRAVE ACCENT 0067 g \textg LATIN SMALL LETTER G 007B { \textbraceleft LEFT CURLY BRACKET 007C | \textbar VERTICAL LINE 007D } \textbraceright RIGHT CURLY BRACKET 007E ~ \textasciitilde TILDE 00A0 \nobreakspace NO-BREAK SPACE 00A1 ¡ \textexclamdown INVERTED EXCLAMATION MARK 00A2 ¢ \textcent CENT SIGN 00A3 £ \textsterling POUND SIGN 00A4 ¤ \textcurrency CURRENCY SIGN 00A5 ¥ \textyen YEN SIGN 00A6 -
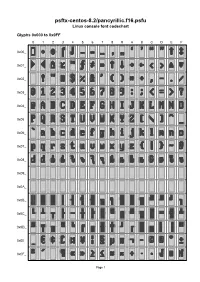
Psftx-Centos-8.2/Pancyrillic.F16.Psfu Linux Console Font Codechart
psftx-centos-8.2/pancyrillic.f16.psfu Linux console font codechart Glyphs 0x000 to 0x0FF 0 1 2 3 4 5 6 7 8 9 A B C D E F 0x00_ 0x01_ 0x02_ 0x03_ 0x04_ 0x05_ 0x06_ 0x07_ 0x08_ 0x09_ 0x0A_ 0x0B_ 0x0C_ 0x0D_ 0x0E_ 0x0F_ Page 1 Glyphs 0x100 to 0x1FF 0 1 2 3 4 5 6 7 8 9 A B C D E F 0x10_ 0x11_ 0x12_ 0x13_ 0x14_ 0x15_ 0x16_ 0x17_ 0x18_ 0x19_ 0x1A_ 0x1B_ 0x1C_ 0x1D_ 0x1E_ 0x1F_ Page 2 Font information 0x018 U+2191 UPWARDS ARROW Filename: psftx-centos-8.2/pancyrillic.f16.psfu 0x019 U+2193 DOWNWARDS ARROW PSF version: 1 0x01A U+2192 RIGHTWARDS ARROW Glyph size: 8 × 16 pixels Glyph count: 512 0x01B U+2190 LEFTWARDS ARROW Unicode font: Yes (mapping table present) 0x01C U+2039 SINGLE LEFT-POINTING ANGLE QUOTATION MARK Unicode mappings 0x01D U+2040 CHARACTER TIE 0x000 U+FFFD REPLACEMENT CHARACTER 0x01E U+25B2 BLACK UP-POINTING 0x001 U+2022 BULLET TRIANGLE 0x01F U+25BC BLACK DOWN-POINTING 0x002 U+25C6 BLACK DIAMOND, TRIANGLE U+2666 BLACK DIAMOND SUIT 0x020 U+0020 SPACE 0x003 U+2320 TOP HALF INTEGRAL 0x021 U+0021 EXCLAMATION MARK 0x004 U+2321 BOTTOM HALF INTEGRAL 0x022 U+0022 QUOTATION MARK 0x005 U+2013 EN DASH 0x023 U+0023 NUMBER SIGN 0x006 U+2014 EM DASH 0x024 U+0024 DOLLAR SIGN 0x007 U+2026 HORIZONTAL ELLIPSIS 0x025 U+0025 PERCENT SIGN 0x008 U+201A SINGLE LOW-9 QUOTATION MARK 0x026 U+0026 AMPERSAND 0x009 U+201E DOUBLE LOW-9 0x027 U+0027 APOSTROPHE QUOTATION MARK 0x00A U+2018 LEFT SINGLE QUOTATION 0x028 U+0028 LEFT PARENTHESIS MARK 0x029 U+0029 RIGHT PARENTHESIS 0x00B U+2019 RIGHT SINGLE QUOTATION MARK 0x02A U+002A ASTERISK 0x00C U+201C LEFT DOUBLE -

CEN WORKSHOP AGREEMENT CWA 13873:2000 Multilingual
CEN WORKSHOP AGREEMENT CWA 13873:2000 2000-03-01 English version Information technology – Multilingual European Subsets in ISO/IEC 10646-1 Technologies de l’information – Informationstechnologie – Jeux partiels européens multilingues Mehrsprachige europäische Untermengen dans l’ISO/CEI 10646-1 in ISO/IEC 10646-1 This CEN Workshop Agreement has been drafted and approved by a Workshop of representatives of interested parties, whose names and affiliations can be obtained from the CEN/ISSS Secretariat. The formal process followed by the Workshop in the development of this Workshop Agreement has been endorsed by the National Members of CEN, but neither the National Members of CEN nor the CEN Central Secretariat can be held accountable for the technical content of this CEN Workshop Agreement or for possible conflicts with standards or legislation. This CEN Workshop Agreement can in no way be held as being an official standard developed by CEN and its Members. This CEN Workshop Agreement is publicly available, as a reference document, from the CEN Members National Standard Bodies. CEN Members are the National Standards Bodies of Austria, Belgium, the Czech Republic, Denmark, Finland, France, Germany, Greece, Iceland, Ireland, Italy, Luxembourg, the Netherlands, Norway, Portugal, Spain, Sweden, Switzerland and the United Kingdom. CEN EUROPEAN COMMITTEE FOR STANDARDIZATION COMITÉ EUROPÉEN DE NORMALISATION EUROPÄISCHES KOMITEE FÜR NORMUNG Central Secretariat: rue de Stassart 36, B-1050 Brussels © CEN 2000 All rights of exploitation in any form and by any means reserved worldwide for CEN national Members Ref.No. CWA 13873:2000 E Page 2 CWA 13873:2000 Contents Foreword 3 Introduction 4 1. Scope 5 2. -

ISO/IEC International Standard 10646-1
JTC1/SC2/WG2 N3381 ISO/IEC 10646:2003/Amd.4:2008 (E) Information technology — Universal Multiple-Octet Coded Character Set (UCS) — AMENDMENT 4: Cham, Game Tiles, and other characters such as ISO/IEC 8824 and ISO/IEC 8825, the concept of Page 1, Clause 1 Scope implementation level may still be referenced as „Implementa- tion level 3‟. See annex N. In the note, update the Unicode Standard version from 5.0 to 5.1. Page 12, Sub-clause 16.1 Purpose and con- text of identification Page 1, Sub-clause 2.2 Conformance of in- formation interchange In first paragraph, remove „, the implementation level,‟. In second paragraph, remove „, and to an identified In second paragraph, remove „with an implementation implementation level chosen from clause 14‟. level‟. In fifth paragraph, remove „, the adopted implementa- Page 12, Sub-clause 16.2 Identification of tion level‟. UCS coded representation form with imple- mentation level Page 1, Sub-clause 2.3 Conformance of de- vices Rename sub-clause „Identification of UCS coded repre- sentation form‟. In second paragraph (after the note), remove „the adopted implementation level,‟. In first paragraph, remove „and an implementation level (see clause 14)‟. In fourth and fifth paragraph (b and c statements), re- move „and implementation level‟. Replace the 6-item list by the following 2-item list and note: Page 2, Clause 3 Normative references ESC 02/05 02/15 04/05 Update the reference to the Unicode Bidirectional Algo- UCS-2 rithm and the Unicode Normalization Forms as follows: ESC 02/05 02/15 04/06 Unicode Standard Annex, UAX#9, The Unicode Bidi- rectional Algorithm, Version 5.1.0, March 2008. -
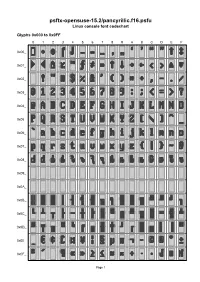
Psftx-Opensuse-15.2/Pancyrillic.F16.Psfu Linux Console Font Codechart
psftx-opensuse-15.2/pancyrillic.f16.psfu Linux console font codechart Glyphs 0x000 to 0x0FF 0 1 2 3 4 5 6 7 8 9 A B C D E F 0x00_ 0x01_ 0x02_ 0x03_ 0x04_ 0x05_ 0x06_ 0x07_ 0x08_ 0x09_ 0x0A_ 0x0B_ 0x0C_ 0x0D_ 0x0E_ 0x0F_ Page 1 Glyphs 0x100 to 0x1FF 0 1 2 3 4 5 6 7 8 9 A B C D E F 0x10_ 0x11_ 0x12_ 0x13_ 0x14_ 0x15_ 0x16_ 0x17_ 0x18_ 0x19_ 0x1A_ 0x1B_ 0x1C_ 0x1D_ 0x1E_ 0x1F_ Page 2 Font information 0x017 U+221E INFINITY Filename: psftx-opensuse-15.2/pancyrillic.f16.p 0x018 U+2191 UPWARDS ARROW sfu PSF version: 1 0x019 U+2193 DOWNWARDS ARROW Glyph size: 8 × 16 pixels 0x01A U+2192 RIGHTWARDS ARROW Glyph count: 512 Unicode font: Yes (mapping table present) 0x01B U+2190 LEFTWARDS ARROW 0x01C U+2039 SINGLE LEFT-POINTING Unicode mappings ANGLE QUOTATION MARK 0x000 U+FFFD REPLACEMENT 0x01D U+2040 CHARACTER TIE CHARACTER 0x01E U+25B2 BLACK UP-POINTING 0x001 U+2022 BULLET TRIANGLE 0x002 U+25C6 BLACK DIAMOND, 0x01F U+25BC BLACK DOWN-POINTING U+2666 BLACK DIAMOND SUIT TRIANGLE 0x003 U+2320 TOP HALF INTEGRAL 0x020 U+0020 SPACE 0x004 U+2321 BOTTOM HALF INTEGRAL 0x021 U+0021 EXCLAMATION MARK 0x005 U+2013 EN DASH 0x022 U+0022 QUOTATION MARK 0x006 U+2014 EM DASH 0x023 U+0023 NUMBER SIGN 0x007 U+2026 HORIZONTAL ELLIPSIS 0x024 U+0024 DOLLAR SIGN 0x008 U+201A SINGLE LOW-9 QUOTATION 0x025 U+0025 PERCENT SIGN MARK 0x026 U+0026 AMPERSAND 0x009 U+201E DOUBLE LOW-9 QUOTATION MARK 0x027 U+0027 APOSTROPHE 0x00A U+2018 LEFT SINGLE QUOTATION 0x028 U+0028 LEFT PARENTHESIS MARK 0x00B U+2019 RIGHT SINGLE QUOTATION 0x029 U+0029 RIGHT PARENTHESIS MARK 0x02A U+002A ASTERISK -

Primo Technical Guide
Technical Guide May 2016 Ex Libris Confidential 6/7 1 CONFIDENTIAL INFORMATION The information herein is the property of Ex Libris Ltd. or its affiliates and any misuse or abuse will result in economic loss. DO NOT COPY UNLESS YOU HAVE BEEN GIVEN SPECIFIC WRITTEN AUTHORIZATION FROM EX LIBRIS LTD. This document is provided for limited and restricted purposes in accordance with a binding contract with Ex Libris Ltd. or an affiliate. The information herein includes trade secrets and is confidential. DISCLAIMER The information in this document will be subject to periodic change and updating. Please confirm that you have the most current documentation. There are no warranties of any kind, express or implied, provided in this documentation, other than those expressly agreed upon in the applicable Ex Libris contract. This information is provided AS IS. Unless otherwise agreed, Ex Libris shall not be liable for any damages for use of this document, including, without limitation, consequential, punitive, indirect or direct damages. Any references in this document to third‐party material (including third‐party Web sites) are provided for convenience only and do not in any manner serve as an endorsement of that third‐ party material or those Web sites. The third‐party materials are not part of the materials for this Ex Libris product and Ex Libris has no liability for such materials. TRADEMARKS ʺEx Libris,ʺ the Ex Libris bridge , Primo, Aleph, Alephino, Voyager, SFX, MetaLib, Verde, DigiTool, Preservation, Rosetta, URM, ENCompass, Endeavor eZConnect, WebVoyáge, Citation Server, LinkFinder and LinkFinder Plus, and other marks are trademarks or registered trademarks of Ex Libris Ltd. -

Minimum Retroreflectivity Levels for Overhead Guide Signs and Street-Name Signs
Minimum Retroreflectivity Levels for Overhead Guide Signs and Street-Name Signs PUBLICATION NO. FHWA-RD-03-082 U.S. Department of Transportation Federal Highway Administration Research, Development, and Technology Turner-Fairbank Highway Research Center 6300 Georgetown Pike McLean, VA 22101-2296 Foreword Report FHWA-RD-03-082 presents the results of a study that investigated the nighttime visibility needs of drivers for viewing overhead guide signs and street name signs. This effort reviewed past research and current practices to design a series of field tests. Field experiments were conducted with drivers 55 years and older in which the headlight illumination was incrementally increased until they could correctly read the messages on the overhead signs. The results from these experiments provided the data needed to determine threshold levels of demand luminance necessary to meet driver needs. The researchers back calculated minimum sign retroreflectivity levels using information about the supply luminance associated with the various retroreflective sign materials and amounts of illumination provided. The research indicated that some combinations of sign materials were inadequate to meet driver needs given changes in the headlight design, legibility requirements, viewing position from larger vehicles, and other factors. Tables of recommended minimum retroreflectivity levels for overhead guide and street name signs were formulated from the data gathered in the research. These tables cover a subset of signs that had not been addressed in previous research. It is important to note that this research was initially completed before the need for updates to the other previously developed tables of minimum levels of traffic sign retroreflectivity became apparent. -

Cyrillic # Version Number
############################################################### # # TLD: xn--j1aef # Script: Cyrillic # Version Number: 1.0 # Effective Date: July 1st, 2011 # Registry: Verisign, Inc. # Address: 12061 Bluemont Way, Reston VA 20190, USA # Telephone: +1 (703) 925-6999 # Email: [email protected] # URL: http://www.verisigninc.com # ############################################################### ############################################################### # # Codepoints allowed from the Cyrillic script. # ############################################################### U+0430 # CYRILLIC SMALL LETTER A U+0431 # CYRILLIC SMALL LETTER BE U+0432 # CYRILLIC SMALL LETTER VE U+0433 # CYRILLIC SMALL LETTER GE U+0434 # CYRILLIC SMALL LETTER DE U+0435 # CYRILLIC SMALL LETTER IE U+0436 # CYRILLIC SMALL LETTER ZHE U+0437 # CYRILLIC SMALL LETTER ZE U+0438 # CYRILLIC SMALL LETTER II U+0439 # CYRILLIC SMALL LETTER SHORT II U+043A # CYRILLIC SMALL LETTER KA U+043B # CYRILLIC SMALL LETTER EL U+043C # CYRILLIC SMALL LETTER EM U+043D # CYRILLIC SMALL LETTER EN U+043E # CYRILLIC SMALL LETTER O U+043F # CYRILLIC SMALL LETTER PE U+0440 # CYRILLIC SMALL LETTER ER U+0441 # CYRILLIC SMALL LETTER ES U+0442 # CYRILLIC SMALL LETTER TE U+0443 # CYRILLIC SMALL LETTER U U+0444 # CYRILLIC SMALL LETTER EF U+0445 # CYRILLIC SMALL LETTER KHA U+0446 # CYRILLIC SMALL LETTER TSE U+0447 # CYRILLIC SMALL LETTER CHE U+0448 # CYRILLIC SMALL LETTER SHA U+0449 # CYRILLIC SMALL LETTER SHCHA U+044A # CYRILLIC SMALL LETTER HARD SIGN U+044B # CYRILLIC SMALL LETTER YERI U+044C # CYRILLIC -
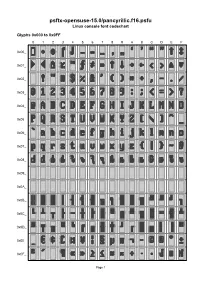
Psftx-Opensuse-15.0/Pancyrillic.F16.Psfu Linux Console Font Codechart
psftx-opensuse-15.0/pancyrillic.f16.psfu Linux console font codechart Glyphs 0x000 to 0x0FF 0 1 2 3 4 5 6 7 8 9 A B C D E F 0x00_ 0x01_ 0x02_ 0x03_ 0x04_ 0x05_ 0x06_ 0x07_ 0x08_ 0x09_ 0x0A_ 0x0B_ 0x0C_ 0x0D_ 0x0E_ 0x0F_ Page 1 Glyphs 0x100 to 0x1FF 0 1 2 3 4 5 6 7 8 9 A B C D E F 0x10_ 0x11_ 0x12_ 0x13_ 0x14_ 0x15_ 0x16_ 0x17_ 0x18_ 0x19_ 0x1A_ 0x1B_ 0x1C_ 0x1D_ 0x1E_ 0x1F_ Page 2 Font information 0x017 U+221E INFINITY Filename: psftx-opensuse-15.0/pancyrillic.f16.p 0x018 U+2191 UPWARDS ARROW sfu PSF version: 1 0x019 U+2193 DOWNWARDS ARROW Glyph size: 8 × 16 pixels 0x01A U+2192 RIGHTWARDS ARROW Glyph count: 512 Unicode font: Yes (mapping table present) 0x01B U+2190 LEFTWARDS ARROW 0x01C U+2039 SINGLE LEFT-POINTING Unicode mappings ANGLE QUOTATION MARK 0x000 U+FFFD REPLACEMENT 0x01D U+2040 CHARACTER TIE CHARACTER 0x01E U+25B2 BLACK UP-POINTING 0x001 U+2022 BULLET TRIANGLE 0x002 U+25C6 BLACK DIAMOND, 0x01F U+25BC BLACK DOWN-POINTING U+2666 BLACK DIAMOND SUIT TRIANGLE 0x003 U+2320 TOP HALF INTEGRAL 0x020 U+0020 SPACE 0x004 U+2321 BOTTOM HALF INTEGRAL 0x021 U+0021 EXCLAMATION MARK 0x005 U+2013 EN DASH 0x022 U+0022 QUOTATION MARK 0x006 U+2014 EM DASH 0x023 U+0023 NUMBER SIGN 0x007 U+2026 HORIZONTAL ELLIPSIS 0x024 U+0024 DOLLAR SIGN 0x008 U+201A SINGLE LOW-9 QUOTATION 0x025 U+0025 PERCENT SIGN MARK 0x026 U+0026 AMPERSAND 0x009 U+201E DOUBLE LOW-9 QUOTATION MARK 0x027 U+0027 APOSTROPHE 0x00A U+2018 LEFT SINGLE QUOTATION 0x028 U+0028 LEFT PARENTHESIS MARK 0x00B U+2019 RIGHT SINGLE QUOTATION 0x029 U+0029 RIGHT PARENTHESIS MARK 0x02A U+002A ASTERISK