Computer Pc Components, Features and Control Components of System and Its Feature Types of Computer Software Types Operating System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Intel® Xeon® Processor E3-1200 V2 Product Family and LGA 1155 Socket
Intel® Xeon® Processor E3-1200 v2 Product Family and LGA 1155 Socket Thermal/Mechanical Specifications and Design Guidelines May 2012 Document Number: 324973-001 NFORMATIONLegal Lines and Disclaimers IN THIS DOCUMENT IS PROVIDED IN CONNECTION WITH INTEL® PRODUCTS. NO LICENSE, EXPRESS OR IMPLIED, BY ESTOPPEL OR OTHERWISE, TO ANY INTELLECTUAL PROPERTY RIGHTS IS GRANTED BY THIS DOCUMENT. EXCEPT AS PROVIDED IN INTEL'S TERMS AND CONDITIONS OF SALE FOR SUCH PRODUCTS, INTEL ASSUMES NO LIABILITY WHATSOEVER, AND INTEL DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY, RELATING TO SALE AND/OR USE OF INTEL PRODUCTS INCLUDING LIABILITY OR WARRANTIES RELATING TO FITNESS FOR A PARTICULAR PURPOSE, MERCHANTABILITY, OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. Intel products are not intended for use in medical, life saving, life sustaining, critical control or safety systems, or in nuclear facility applications. Intel may make changes to specifications and product descriptions at any time, without notice. This document contains information on products in the design phase of development. The information here is subject to change without notice. Do not finalize a design with this information. Designers must not rely on the absence or characteristics of any features or instructions marked “reserved” or “undefined.” Intel reserves these for future definition and shall have no responsibility whatsoever for conflicts or incompatibilities arising from future changes to them. The Intel® Xeon® processor E3-1200 v2 product family and Intel® C200 Series Chipset family may contain design defects or errors known as errata which may cause the product to deviate from published specifications. Current characterized errata are available on request. -

Video Games: Changing the Way We Think of Home Entertainment
Rochester Institute of Technology RIT Scholar Works Theses 2005 Video games: Changing the way we think of home entertainment Eri Shulga Follow this and additional works at: https://scholarworks.rit.edu/theses Recommended Citation Shulga, Eri, "Video games: Changing the way we think of home entertainment" (2005). Thesis. Rochester Institute of Technology. Accessed from This Thesis is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact [email protected]. Video Games: Changing The Way We Think Of Home Entertainment by Eri Shulga Thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Information Technology Rochester Institute of Technology B. Thomas Golisano College of Computing and Information Sciences Copyright 2005 Rochester Institute of Technology B. Thomas Golisano College of Computing and Information Sciences Master of Science in Information Technology Thesis Approval Form Student Name: _ __;E=.;r....;...i S=-h;....;..;u;;;..;..lg;;i..;:a;;...__ _____ Thesis Title: Video Games: Changing the Way We Think of Home Entertainment Thesis Committee Name Signature Date Evelyn Rozanski, Ph.D Evelyn Rozanski /o-/d-os- Chair Prof. Andy Phelps Andrew Phelps Committee Member Anne Haake, Ph.D Anne R. Haake Committee Member Thesis Reproduction Permission Form Rochester Institute of Technology B. Thomas Golisano College of Computing and Information Sciences Master of Science in Information Technology Video Games: Changing the Way We Think Of Home Entertainment L Eri Shulga. hereby grant permission to the Wallace Library of the Rochester Institute of Technofogy to reproduce my thesis in whole or in part. -

I Am |The Nikon 1
I AM | THE NIKON 1 I AM THE NEW ADVANCED CAMERA WITH INTERCHANGEABLE LENS I AM | THE INTELLIGENT CAMERA The result is Nikon 1 — an intelligent camera Built to let you shoot images you would never have Nikon 1 system crafted to bring new levels of speed, believed possible, they can start recording simplicity and enjoyment to the way you capture images before you fully press the shutter button Every now and then a real game your world. and continue after you’ve clicked. changer comes along Astonishingly fast, stunningly compact and And we didn’t just focus on the new. In fact, when amazingly precise, both of our first-generation it came to crafting the cameras’ 1 mount system, we We could have done everything the easy way and used existing technology. Nikon 1 cameras put the power to shoot impressive drew on more than 50 years of expertise. But we decided to go back to the drawing board and re-imagine how cameras stills and movies right into the palm of your hand. are designed. The 1 mount is what allows you to use the Nikon 1 Exceptionally intuitive to use, they offer fully system’s range of interchangeable 1 NIKKOR automatic operation. lenses. Engineered to ensure each lens communi- cates perfectly with the camera, it enables still Equipped with the fastest autofocus system1 in the image and movie recording without compromise. world and a high-speed image processor, they ensure the best possible shots in any situation. 1 The world’s shortest shooting time lag (as determined by Nikon performance tests). -

(Form Factor), Btx (Form Factor), Computer Form
0NB8RPHZLWIR » Book » Motherboard Form Factors: Atx, at (Form Factor), Btx (Form Factor), Computer Form... Read eBook Online MOTHERBOARD FORM FACTORS: ATX, AT (FORM FACTOR), BTX (FORM FACTOR), COMPUTER FORM FACTOR, COM EXPRESS, COREEXPRESS, DIAMOND SYSTEMS CORPORATION, To read Motherboard Form Factors: Atx, at (Form Factor), Btx (Form Factor), Computer Form Factor, Com Express, Coreexpress, Diamond Systems Corporation, PDF, please refer to the hyperlink beneath and download the document or gain access to other information which might be have conjunction with MOTHERBOARD FORM FACTORS: ATX, AT (FORM FACTOR), BTX (FORM FACTOR), COMPUTER FORM FACTOR, COM EXPRESS, COREEXPRESS, DIAMOND SYSTEMS CORPORATION, book. Download PDF Motherboard Form Factors: Atx, at (Form Factor), Btx (Form Factor), Computer Form Factor, Com Express, Coreexpress, Diamond Systems Corporation, Authored by Source Wikipedia Released at 2016 Filesize: 2.04 MB Reviews A really awesome pdf with perfect and lucid reasons. Yes, it is actually engage in, continue to an interesting and amazing literature. I am effortlessly will get a delight of studying a published pdf. -- Shaniya Stamm Extremely helpful to all of group of people. It really is loaded with wisdom and knowledge I am just delighted to inform you that this is actually the best pdf we have read within my personal existence and might be he very best publication for possibly. -- Lon Jerde This publication is amazing. it absolutely was writtern very completely and helpful. Its been printed in an remarkably straightforward way and it is simply after i finished reading through this ebook through which in fact altered me, change the way i think. -- Jodie Schneider TERMS | DMCA EGV2GBDX9VA8 » PDF » Motherboard Form Factors: Atx, at (Form Factor), Btx (Form Factor), Computer Form.. -

Average Memory Access Time: Reducing Misses
Review: Cache performance 332 Miss-oriented Approach to Memory Access: Advanced Computer Architecture ⎛ MemAccess ⎞ CPUtime = IC × ⎜ CPI + × MissRate × MissPenalt y ⎟ × CycleTime Chapter 2 ⎝ Execution Inst ⎠ ⎛ MemMisses ⎞ CPUtime = IC × ⎜ CPI + × MissPenalt y ⎟ × CycleTime Caches and Memory Systems ⎝ Execution Inst ⎠ CPIExecution includes ALU and Memory instructions January 2007 Separating out Memory component entirely Paul H J Kelly AMAT = Average Memory Access Time CPIALUOps does not include memory instructions ⎛ AluOps MemAccess ⎞ These lecture notes are partly based on the course text, Hennessy CPUtime = IC × ⎜ × CPI + × AMAT ⎟ × CycleTime and Patterson’s Computer Architecture, a quantitative approach (3rd ⎝ Inst AluOps Inst ⎠ and 4th eds), and on the lecture slides of David Patterson and John AMAT = HitTime + MissRate × MissPenalt y Kubiatowicz’s Berkeley course = ()HitTime Inst + MissRate Inst × MissPenalt y Inst + ()HitTime Data + MissRate Data × MissPenalt y Data Advanced Computer Architecture Chapter 2.1 Advanced Computer Architecture Chapter 2.2 Average memory access time: Reducing Misses Classifying Misses: 3 Cs AMAT = HitTime + MissRate × MissPenalt y Compulsory—The first access to a block is not in the cache, so the block must be brought into the cache. Also called cold start misses or first reference misses. There are three ways to improve cache (Misses in even an Infinite Cache) Capacity—If the cache cannot contain all the blocks needed during performance: execution of a program, capacity misses will occur due to blocks being discarded and later retrieved. (Misses in Fully Associative Size X Cache) 1. Reduce the miss rate, Conflict—If block-placement strategy is set associative or direct mapped, conflict misses (in addition to compulsory & capacity misses) will 2. -

User's Guide PN: 961Ć047Ć081
6950 Enterprise Gateway Server USER’S GUIDE """""""""""""""""""""""""""" PN: 961-047-091 Revision D September 1999 " NOTICE The information contained herein is proprietary and is provided solely for the purpose of allowing customers to operate and service Intermec manufactured equipment and is not to be released, reproduced, or used for any other purpose without written permission of Intermec. Disclaimer of Warranties. The sample source code included in this document is presented for reference only. The code does not necessarily represent complete, tested programs. The code is provided AS IS WITH ALL FAULTS." ALL WARRANTIES ARE EXPRESSLY DISCLAIMED, INCLUDING THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. We welcome your comments concerning this publication. Although every effort has been made to keep it free of errors, some may occur. When reporting a specific problem, please describe it briefly and include the book title and part number, as well as the paragraph or figure number and the page number. Send your comments to: Intermec Technologies Corporation Publications Department 550 Second Street SE Cedar Rapids, IA 52401 INTERMEC and NORAND are registered trademarks and ENTERPRISE WIRELESS LAN, UAP, and UNIVERSAL ACCESS POINT are trademarks of Intermec Technologies Corporation. 1996 Intermec Technologies Corporation. All rights reserved. Acknowledgments AS/400 and IBM are registered trademarks of International Business Machines Corporation. DEC, VAX, and VT220 are registered trademarks of Digital Equipment Corporation. UNIX is a registered trademark of UNIX System Laboratories, Inc. B CAUTION: Intermec Technologies Corporation suggests you buy cables from us to connect with other devices. Our cables are safe, meet FCC rules, and suit our products. -
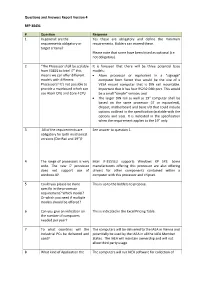
Questions and Answers Report Version 4 RFP 30431 # Question
Questions and Answers Report Version 4 RFP 30431 # Question Response 1 In general: are the Yes these are obligatory and define the minimum requirements obligatory or requirements. Bidders can exceed these. target criteria? Please note that some have been listed as optional (i.e. not obligatory). 2 “The Processor shall be scalable It is foreseen that there will be three potential base from E3825 to Intel i7” this models: means we can offer different • Atom processor or equivalent in a “signage” models with different computer form factor that would be the size of a Processors? It’s not possible to VESA mount computer that is DIN rail mountable. provide a mainboard which can Important that it has four RS232 DB9 port. This would use Atom CPU and Core-I CPU be a small “simple” version; and • The larger DIN rail as well as 19” computer shall be based on the same processor (i7 or equivalent), chipset, motherboard and basic I/O that could include options outlined in the specification (scalable with the options and size). It is indicated in the specification when the requirement applies to the 19” only. 3 All of the requirements are See answer to question 1. obligatory for both mechanical versions (Din-Rail and 19”)? 4 The range of processors is very Intel i7-3555LU supports Windows XP SP3. Some wide. The new i7 processor manufacturers offering this processor are also offering does not support use of drivers for other components contained within a windows XP. computer with this processor and chipset. 5 Could you please be more This is up to the bidders to propose. -

Openbsd Gaming Resource
OPENBSD GAMING RESOURCE A continually updated resource for playing video games on OpenBSD. Mr. Satterly Updated August 7, 2021 P11U17A3B8 III Title: OpenBSD Gaming Resource Author: Mr. Satterly Publisher: Mr. Satterly Date: Updated August 7, 2021 Copyright: Creative Commons Zero 1.0 Universal Email: [email protected] Website: https://MrSatterly.com/ Contents 1 Introduction1 2 Ways to play the games2 2.1 Base system........................ 2 2.2 Ports/Editors........................ 3 2.3 Ports/Emulators...................... 3 Arcade emulation..................... 4 Computer emulation................... 4 Game console emulation................. 4 Operating system emulation .............. 7 2.4 Ports/Games........................ 8 Game engines....................... 8 Interactive fiction..................... 9 2.5 Ports/Math......................... 10 2.6 Ports/Net.......................... 10 2.7 Ports/Shells ........................ 12 2.8 Ports/WWW ........................ 12 3 Notable games 14 3.1 Free games ........................ 14 A-I.............................. 14 J-R.............................. 22 S-Z.............................. 26 3.2 Non-free games...................... 31 4 Getting the games 33 4.1 Games............................ 33 5 Former ways to play games 37 6 What next? 38 Appendices 39 A Clones, models, and variants 39 Index 51 IV 1 Introduction I use this document to help organize my thoughts, files, and links on how to play games on OpenBSD. It helps me to remember what I have gone through while finding new games. The biggest reason to read or at least skim this document is because how can you search for something you do not know exists? I will show you ways to play games, what free and non-free games are available, and give links to help you get started on downloading them. -

Tws2502 2U Motherboard Rackmount Workstation
TWS2502 2U MOTHERBOARD RACKMOUNT WORKSTATION Trenton Systems’ legendary performance and longevity now costs less! FEATURES • Dual processor computing power in a compact package • Low total cost of ownership • Standardized base configuration means low lead time • Motherboard supports a wide variety of Intel® Xeon® processors • Accomodates up to 8 hot swap, front access 3.5” HDD/SSDs • Short chassis depth for added deployment flexibility • Assembled, validated and configured in the USA Trenton TWS2502 Rackmount Workstation (Shown with and without front dust cover) TWS2502 OVERVIEW: The TWS2502 is ideal for applications that require dual-processor performance and reliability provided by Intel® Xeon® E5-2600 v3 series processors, while maintaining a modest worksta- tion-class price point. The TWS2502 workstation’s standard ATX form factor, combined with a commerical, off the shelf chassis and motherboard solution keeps cost low while not compromising system performance and maintaining a competitive feature set. Eight, front-facing hot-swappable 3.5” hard disk carriers, with 2 additional internal 2.5” drive bays make configuring the TWS2502 for various storage applications easy and the 6 half-height PCIe option card slots allow for additional deployment flexibility when utilizing COTS expansion cards. The TWS2502 is built on a standard, 19” rackmount computer form factor, allowing easy component rack configuration while the compact 22.5” external depth measurement ensures the TWS2502 will easily adapt to your deployment constraints. TWS2502 CHASSIS LAYOUT CONFIGURATION: 19.0” 48.26cm Front View with and without dust cover 22.5” 57.15cm 3.5” 8.89cm Rear View Top View Side View with upper cover removed TRENTON RACKMOUNT WORKSTATION: TWS2502 MODEL DESCRIPTION TWS2502 This rackmount workstation features a long-life ATX motherboard with a base configuration featuring dual Intel® Xeon® E5-2620v3 (Haswell-EP) processors to deliver workstation performance with long life and exceptional value. -

Multiprocessing Contents
Multiprocessing Contents 1 Multiprocessing 1 1.1 Pre-history .............................................. 1 1.2 Key topics ............................................... 1 1.2.1 Processor symmetry ...................................... 1 1.2.2 Instruction and data streams ................................. 1 1.2.3 Processor coupling ...................................... 2 1.2.4 Multiprocessor Communication Architecture ......................... 2 1.3 Flynn’s taxonomy ........................................... 2 1.3.1 SISD multiprocessing ..................................... 2 1.3.2 SIMD multiprocessing .................................... 2 1.3.3 MISD multiprocessing .................................... 3 1.3.4 MIMD multiprocessing .................................... 3 1.4 See also ................................................ 3 1.5 References ............................................... 3 2 Computer multitasking 5 2.1 Multiprogramming .......................................... 5 2.2 Cooperative multitasking ....................................... 6 2.3 Preemptive multitasking ....................................... 6 2.4 Real time ............................................... 7 2.5 Multithreading ............................................ 7 2.6 Memory protection .......................................... 7 2.7 Memory swapping .......................................... 7 2.8 Programming ............................................. 7 2.9 See also ................................................ 8 2.10 References ............................................. -
Winter Meltdown Event
WINTER MELTDOWN EVENT 83 YEARS IN BUSINESS Internet WE PAY YOUR Pricing! Y 12 MONTHS XT DA NO INTEREST NE Cardinal Camera will pay your sales tax on all camera purchases in the form of store credit. FORSALES TAX FINANCING G SHIPPIN Excludes lenses and flashes FREE 3 DAYS ONLY! January 24-25-26 UP TO Since 1937 CHARLOTTE OPEN ARBORETUM 50% OFF SUNDAYS SHOPPING CENTER next to Harris Teeter ENTIRE 3351 Pineville Matthews Rd. Suite 100 Charlotte STORE 704-541-7488 www.cardinalcamera.com 2 DAYS ONLY! Manufacturers reps SONY’S BIGGEST SALE JANUARY 24-25 FREE CAMERA showing the latest in OF THE YEAR CLEANING digital cameras and lenses. SAVE UP TO $700 Sensor Cleaning $49.99 SONY a9 $500 instant rebate plus Lens Calibrations $200 trade in rebate = $700 $19.99 SONY a7rmIV $300 extra trade in allowance SONY a7rmIII $300 instant rebate plus extra $200 trade in CA$H FOR CAMERAS FUJI allowance = $500 BRING IN YOUR USED CAMERA Up to $250 extra trade in GEAR PLUS YOUR USED APPLE PRODUCTS allowance on SONY LENSES SONY 100-400mm, SONY 200-600 Bring in your old gear and get 2 DAYS ONLY! CASH or an additional 10% in CARDINAL CREDIT 2 DAYS ONLY! SONY 16-35mm, SONY 24-70mm when buying a new camera or lens. JANUARY 24-25 JANUARY 24-25 SONY 24mm 1.4mm and many more FREE ALL FOOD MAJOR FREE EXPO SEMINARS AGES CLEARANCE SATURDAY, JANUARY 25TH SALE Selling Brand New, 8:30am Camera Essentials 1 - You have a DSLR now Classes taught by Tony Ulchar Overstocks, what? How to get better photos from your camera Open Boxed, 11:00am Light It Up Flash Class - How to create great Clearance and Demo portraits using flash. -

Mips 16 Bit Instruction Set
Mips 16 bit instruction set Continue Instruction set architecture MIPSDesignerMIPS Technologies, Imagination TechnologiesBits64-bit (32 → 64)Introduced1985; 35 years ago (1985)VersionMIPS32/64 Issue 6 (2014)DesignRISCTypeRegister-RegisterEncodingFixedBranchingCompare and branchEndiannessBiPage size4 KBExtensionsMDMX, MIPS-3DOpenPartly. The R12000 has been on the market for more than 20 years and therefore cannot be subject to patent claims. Thus, the R12000 and old processors are completely open. RegistersGeneral Target32Floating Point32 MIPS (Microprocessor without interconnected pipeline stages) is a reduced setting of the Computer Set (RISC) Instruction Set Architecture (ISA):A-3:19, developed by MIPS Computer Systems, currently based in the United States. There are several versions of MIPS: including MIPS I, II, III, IV and V; and five MIPS32/64 releases (for 32- and 64-bit sales, respectively). The early MIPS architectures were only 32-bit; The 64-bit versions were developed later. As of April 2017, the current version of MIPS is MIPS32/64 Release 6. MiPS32/64 differs primarily from MIPS I-V, defining the system Control Coprocessor kernel preferred mode in addition to the user mode architecture. The MIPS architecture has several additional extensions. MIPS-3D, which is a simple set of floating-point SIMD instructions dedicated to common 3D tasks, MDMX (MaDMaX), which is a more extensive set of SIMD instructions using 64-bit floating current registers, MIPS16e, which adds compression to flow instructions to make programs that take up less space, and MIPS MT, which adds layered potential. Computer architecture courses in universities and technical schools often study MIPS architecture. Architecture has had a major impact on later RISC architectures such as Alpha.