Crystallographic Symmetry Operations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Glide and Screw
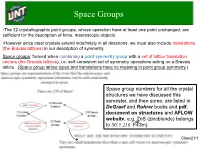
Space Groups •The 32 crystallographic point groups, whose operation have at least one point unchanged, are sufficient for the description of finite, macroscopic objects. •However since ideal crystals extend indefinitely in all directions, we must also include translations (the Bravais lattices) in our description of symmetry. Space groups: formed when combining a point symmetry group with a set of lattice translation vectors (the Bravais lattices), i.e. self-consistent set of symmetry operations acting on a Bravais lattice. (Space group lattice types and translations have no meaning in point group symmetry.) Space group numbers for all the crystal structures we have discussed this semester, and then some, are listed in DeGraef and Rohrer books and pdf. document on structures and AFLOW website, e.g. ZnS (zincblende) belongs to SG # 216: F43m) Class21/1 Screw Axes •The combination of point group symmetries and translations also leads to two additional operators known as glide and screw. •The screw operation is a combination of a rotation and a translation parallel to the rotation axis. •As for simple rotations, only diad, triad, tetrad and hexad axes, that are consistent with Bravais lattice translation vectors can be used for a screw operator. •In addition, the translation on each rotation must be a rational fraction of the entire translation. •There is no combination of rotations or translations that can transform the pattern produced by 31 to the pattern of 32 , and 41 to the pattern of 43, etc. •Thus, the screw operation results in handedness Class21/2 or chirality (can’t superimpose image on another, e.g., mirror image) to the pattern. -

1 NANO 704-Crystallography & Structure of Nanomaterials 3
1 NANO 704-Crystallography & Structure of Nanomaterials 3. Space Groups Space lattices Lattice points are all equivalent by translational symmetry. We start with a primitive lattice, having points at rabcuvw uvw, where uvw,, ¢ . So lattice points exist at (0,0,0) and all equivalent positions. If we have a lattice point at xyz,, , then we also have a lattice point at xuyvzw,, . Suppose two lattice points exist at xyz111,, and xyz222,, . If xyz,, is a lattice point, then xyz,, x212121 x , y y , z z is also a lattice point. But this does not imply that for all xyz,, representing lattice points, the values of xyz,, are integers. In particular, it is often useful to represent some of them by half integers. A primitive cell has lattice points at 0,0,0 . Centered cells have additional lattice points. 11 An A-centered cell also has points at 0,22 , . (Center of the A face.) 11 A B-centered cell also has points at 22,0, . (Center of the B face.) 11 A C-centered cell also has points at 22,,0. (Center of the C face.) 11 11 11 An F (face)-centered cell also has points at 0,22 , , 22,0, , 22,,0. (Centers of all three faces.) 111 An I (body)-centered cell also has points at 222,, . (Center point of the unit cell.) Observations I. Suppose a cell is both A- and B-centered. The lattice points exist at 11 11 P1 : 0,0,0 , P2 : 0,22 , , and P3 : 22,0, and equivalent positions. P1 and P2 form a lattice row. -

Crystallography: Symmetry Groups and Group Representations B
EPJ Web of Conferences 22, 00006 (2012) DOI: 10.1051/epjconf/20122200006 C Owned by the authors, published by EDP Sciences, 2012 Crystallography: Symmetry groups and group representations B. Grenier1 and R. Ballou2 1SPSMS, UMR-E 9001, CEA-INAC / UJF-Grenoble, MDN, 38054 Grenoble, France 2Institut Néel, CNRS / UJF, 25 rue des Martyrs, BP. 166, 38042 Grenoble Cedex 9, France Abstract. This lecture is aimed at giving a sufficient background on crystallography, as a reminder to ease the reading of the forthcoming chapters. It more precisely recalls the crystallographic restrictions on the space isometries, enumerates the point groups and the crystal lattices consistent with these, examines the structure of the space group, which gathers all the spatial invariances of a crystal, and describes a few dual notions. It next attempts to familiarize us with the representation analysis of physical states and excitations of crystals. 1. INTRODUCTION Crystallography covers a wide spectrum of investigations: i- it aspires to get an insight into crystallization phenomena and develops methods of crystal growths, which generally pertains to the physics of non linear irreversible processes; ii- it geometrically describes the natural shapes and the internal structures of the crystals, which is carried out most conveniently by borrowing mathematical tools from group theory; iii- it investigates the crystallized matter at the atomic scale by means of diffraction techniques using X-rays, electrons or neutrons, which are interpreted in the dual context of the reciprocal space and transposition therein of the crystal symmetries; iv- it analyzes the imperfections of the crystals, often directly visualized in scanning electron, tunneling or force microscopies, which in some instances find a meaning by handling unfamiliar concepts from homotopy theory; v- it aims at providing means for discerning the influences of the crystal structure on the physical properties of the materials, which requires to make use of mathematical methods from representation theory. -

Symmetry in 2D
Symmetry in 2D 4/24/2013 L. Viciu| AC II | Symmetry in 2D 1 Outlook • Symmetry: definitions, unit cell choice • Symmetry operations in 2D • Symmetry combinations • Plane Point groups • Plane (space) groups • Finding the plane group: examples 4/24/2013 L. Viciu| AC II | Symmetry in 2D 2 Symmetry Symmetry is the preservation of form and configuration across a point, a line, or a plane. The techniques that are used to "take a shape and match it exactly to another” are called transformations Inorganic crystals usually have the shape which reflects their internal symmetry 4/24/2013 L. Viciu| AC II | Symmetry in 2D 3 Lattice = an array of points repeating periodically in space (2D or 3D). Motif/Basis = the repeating unit of a pattern (ex. an atom, a group of atoms, a molecule etc.) Unit cell = The smallest repetitive volume of the crystal, which when stacked together with replication reproduces the whole crystal 4/24/2013 L. Viciu| AC II | Symmetry in 2D 4 Unit cell convention By convention the unit cell is chosen so that it is as small as possible while reflecting the full symmetry of the lattice (b) to (e) correct unit cell: choice of origin is arbitrary but the cells should be identical; (f) incorrect unit cell: not permissible to isolate unit cells from each other (1 and 2 are not identical)4/24/2013 L. Viciu| AC II | Symmetry in 2D 5 A. West: Solid state chemistry and its applications Some Definitions • Symmetry element: An imaginary geometric entity (line, point, plane) about which a symmetry operation takes place • Symmetry Operation: a permutation of atoms such that an object (molecule or crystal) is transformed into a state indistinguishable from the starting state • Invariant point: point that maps onto itself • Asymmetric unit: The minimum unit from which the structure can be generated by symmetry operations 4/24/2013 L. -

Download English-US Transcript (PDF)
MITOCW | ocw-3.60-27sep2005-part2-220k_512kb.mp4 PROFESSOR: Examine every possible means for combining the symmetry at once, but there is a seemingly paradoxical trick that we can yet pull. And let me indicate what is true here for 2mm. OK, so this is a twofold axis. Has mirror planes perpendicular to it. If one of these is a mirror plane, the other one has to be a mirror plane as well. So there's no way we could make one a mirror plane and one a glide plane. OK, that requires a net that is exactly rectangular. So let's put in the twofold axis. And I add one to the corner of the cell. As we well know we have to have twofold axes at all of these other locations. We want to put a mirror plane in the cell. We could pass it through the twofold axis, and that would be the same as P getting to P2mn back again. But why do we have to put the mirror plane through the twofold axis? We have to have the twofold axis left unchanged when we add the mirror plane, because if we created a new twofold axis we create a new lattice and we'd wreck the lattice that we've constructed. But why, why, oh why couldn't we put the mirror plane in like this? That's going to leave the twofold axis alone. It's going to leave the translations invariant. Why don't we do that? Why not? So here, trick number five, or wherever we are now. -

Euclidean Group - Wikipedia, the Free Encyclopedia Page 1 of 6
Euclidean group - Wikipedia, the free encyclopedia Page 1 of 6 Euclidean group From Wikipedia, the free encyclopedia In mathematics, the Euclidean group E(n), sometimes called ISO( n) or similar, is the symmetry group of n-dimensional Euclidean space. Its elements, the isometries associated with the Euclidean metric, are called Euclidean moves . These groups are among the oldest and most studied, at least in the cases of dimension 2 and 3 — implicitly, long before the concept of group was known. Contents 1 Overview 1.1 Dimensionality 1.2 Direct and indirect isometries 1.3 Relation to the affine group 2 Detailed discussion 2.1 Subgroup structure, matrix and vector representation 2.2 Subgroups 2.3 Overview of isometries in up to three dimensions 2.4 Commuting isometries 2.5 Conjugacy classes 3 See also Overview Dimensionality The number of degrees of freedom for E(n) is n(n + 1)/2, which gives 3 in case n = 2, and 6 for n = 3. Of these, n can be attributed to available translational symmetry, and the remaining n(n − 1)/2 to rotational symmetry. Direct and indirect isometries There is a subgroup E+(n) of the direct isometries , i.e., isometries preserving orientation, also called rigid motions ; they are the rigid body moves. These include the translations, and the rotations, which together generate E+(n). E+(n) is also called a special Euclidean group , and denoted SE (n). The others are the indirect isometries . The subgroup E+(n) is of index 2. In other words, the indirect isometries form a single coset of E+(n). -

Space.Group Symmetry Contained in Table 5.1'
592 International Union of Crystallography Acta Cryst. (1995). A51, 592-595 6 Notes on centred cells Note (i), replace 'Examples are contained in Table 5.1' International Tables for Crystallography by 'Examples of relevant transformation matrices are Volume A: Space.Group Symmetry contained in Table 5.1'. Note (ii), line 4, add 'an interesting example is provided Edited by Th. Hahn by the triple rhombohedral D cell, described in Section 4.3.5'. Fourth, Revised Edition 1995 Note (iii), line 3, add 'especially Table 2.1.1, and de Wolff et al. (1985).' Corrigenda and Addenda to the Add '(iv) Symbols for crystal families and Bravais Third, Revised Edition (1992) lattices in one, two, and three dimensions are listed In the Fourth, Revised Edition (1995), new diagrams have been in Table 2.1.1 and are explained in the Nomenclature incorporated for the triclinic, monoclinic and orthorhombic Report by de Wolff et al. (1985).' space groups. These complete the space-group-diagram project. 6 Section 1.3, entry for m, replace 'Reflection through a The new graphical symbol ...... for 'double' glide planes plane' with 'Reflection through the plane', 'Reflection e oriented 'normal' and 'inclined' to the plane of projection has through a line' with 'Reflection through the line' and been incorporated in the following 17 space-group diagrams: 'Reflection through a point' with 'Reflection through the point'. Orthorhombic Abm2 (No. 39), Aba2 (41), Fmm2 (42), Section 1.3, entry for a, b, or c, replace 'Glide reflection Cmca (64), Cmma (67), Ccca (68) (both origins), Fmmm (69) through a plane' with 'Glide reflection through the plane' Tetragonal 14mm (107), 14cm (108), 1742m (121), Section 1.3, after entry for c, add following enlries for 14/mmm (139), I4/mcm (140) e#: Cubic Fm3 (202), Fm3m (225), Fm3c (226), 1743m Symmetry element and its Definingsymmetry operation with (217), Im3m (229). -

The Crystal Structure of Minerals - H
GEOLOGY – The Crystal Structure of Minerals - H. Effenberger THE CRYSTAL STRUCTURE OF MINERALS H. Effenberger Institut für Mineralogie und Kristallographie, Universität Wien, Wien, Austria Keywords: mineral, crystal, crystal structure, symmetry, symmetry elements, point group, crystal system, crystal class, space group, lattice, translation group, incommensurate structures, crystal chemistry, chemical bond, Pauling=s rules Contents 1. Introduction 2. Symmetry elements 3. Periodicity 4. Crystal systems and point groups 5. Translation lattices 6. Translation groups (line-, plane- and space groups) 7. Defects, quasi-periodic and aperiodic structures 8. Crystal chemistry 9. The crystal structures Glossary Bibliography Biographical Sketch Summary This chapter deals with the characterization of minerals from a crystallographic and crystal chemical point of view. Besides knowledge of the chemical composition, the crystal structure or at least some essential features must be known to define a mineral correctly. The chapter starts with an explanation of the symmetry elements. Crystallized matter is based on a periodic arrangement of the atoms which is defined by the translation lattice. As a consequence there are only strictly limited possibilities for the arrangement of symmetry elements in the (three-dimensional) space. The crystal systems (geometrical requirements of the crystal lattice), crystal classes (symmetry of the shape of a crystal) and space groups (symmetry ofUNESCO the atomic arrangement of –a crystal) EOLSS are discussed. An approach to modulated- and composite- (incommensurate-) structures as well as to quasi- and nano- crystals is given. The second part of the chapter accounts for crystal chemistry. The properties of a mineral are determined by the kind and geometrical arrangement of atoms or molecules withinSAMPLE the crystal structure. -
Introduction to Crystals Symmetry
Introduction to crystals symmetry Symmetry in 3D 5/1/2013 L. Viciu| AC II | Symmetry in 3D 1 Outlook • Symmetry elements in 3D: rotoinversion, screw axes • Combining symmetry elements with the lattice • Space group symbols/representation • Wyckoff positions • Crystallographic conventions • Symmetry in crystal systems 5/1/2013 L. Viciu| AC II | Symmetry in 3D 2 Definitions - a remainder • Unit cell: The smallest volume that can generate the entire crystal structure only by means of translation in three dimensions. • Lattice: A rule of translation. 5/1/2013 L. Viciu| AC II | Symmetry in 3D 3 Bravais Basis/ Crystal + lattice Motif structure 1. single atom: Au, Al, Cu, Pt 1. FCC 2. molecule: solidCH4 2. FCC + - + 3. ion pairs: Na /Cl 3. Rock salt 4. atom pairs: Carbon, Si, Ge 4. diamond •A crystal system is described only in terms of the unit cell geometry, i.e. cubic, tetragonal, etc •A crystal structure is described by both the geometry of, and atomic arrangements within, the unit cell, i.e. face centered cubic, body centered5/1/2013 cubic, etc. L. Viciu| AC II | Symmetry in 3D 4 The Bravais lattices 5/1/2013 L. Viciu| AC II | Symmetry in 3D 5 From 2D to 3D • Bravais lattices may be seen as build up layers of the five plane lattices: cubic and tetragonal stacking of square lattice layers orthorhombic P and I stacking of rectangular layers orthorhombic C and F stacking of rectangular centered layers rhombohedral stacking of hexagonal layers hexagonal stacking of hexagonal layers monoclinic stacking of oblique layers triclinic stacking of oblique layers 5/1/2013 L. -

Molecular Genetics:DNA
4. Geometry of space: lattices and space groups We have discussed the orthogonal group O(n) and the special orthogonal group SO(n) for n = 2; 3, which are groups of rigid motions (transformations) leaving the origin fixed. The group SO(n), the rotations, consists of transformations in O(n) which preserve orientation. Given a coordinate system these transformations can be written in terms of vectors and square matrices called orthogonal matrices. We now discuss a larger groups of rigid motions which contain translations as well as orthogonal transformations. These are the group of euclidean motions E(n), and the group of orientation preserving euclidean motions E+(n). We describe these groups for n = 2 and n = 3. 4.1. The Euclidean Group. The simplest example of a rigid motion that does not leave any point fixed is a translation. A translation is a motion of the form (1) X ! X + X0: Translations preserve orientation so they are in E+(n). All transformations in E(n) are of the form (2) X ! AX + X0 where A is an orthogonal matrix. This can be thought of as a composition of two motions (i) an orthogonal transformation, A, leaving the origin fixed, followed by (ii) a translation moving the origin to X0. All transformations in E+(n) are of the form (2) where A is in SO(3). Orthogonal transformations are defined as rigid motions leaving a point fixed. We can write orthogonal transformations with any fixed point X0 in terms of ones leaving the origin fixed. If A leaves the origin fixed then (3) X ! A(X − X0) + X0 leaves X0 fixed. -

Screw Rotations and Glide Mirrors: Crystallography in Fourier Space
Proc. Natl. Acad. Sci. USA Vol. 96, pp. 3502–3506, March 1999 Physics Screw rotations and glide mirrors: Crystallography in Fourier space ANJA KO¨NIG AND N. DAVID MERMIN Laboratory of Atomic and Solid State Physics, Cornell University, Ithaca, NY 14853-2501 Contributed by N. David Mermin, January 22, 1999 ABSTRACT The traditional crystallographic symmetry Fourier-space structure that makes them nonsymmorphic in elements of screw axes and glide planes are subdivided into spite of the absence of screw rotations. those that are removable and those that are essential. A simple real-space criterion, depending only on Bravais class, deter- Screws and Glides in Three-Dimensional Real Space mines which types can be present in any space group. This terminological refinement is useful in expressing the comple- The traditional description of crystal symmetry as summarized mentary relation between the real-space and Fourier-space in the International Tables of Crystallography (1) specifies two formulations of crystal symmetry, particularly in the case of kinds of rotation axes and mirror planes. (a) Axes or planes for the two nonsymmorphic space groups that have no systematic which the rotation or mirror is a symmetry of the crystal extinctions (I212121 and I213). A simple analysis in Fourier without an accompanying translation. We shall call such space demonstrates the nonsymmorphicity of these two space rotation axes or mirror planes simple.(b) Axes or planes for groups, which finds its physical expression not in a charac- which the rotation or mirror is only a symmetry of the crystal teristic absence of Bragg peaks, but in a characteristic pres- when accompanied by a translation parallel to the axis or ence of electronic level degeneracies. -
Ravy Bootstat .Pdf
Basics symmetry in condensed matter physics Sylvain Ravy Laboratoire de physique des solides CNRS, Université Paris-Saclay • Symmetry: • From greak (sun) ‘’with" (metron) "measure" • Same etymology as "commensurate" • Until mid-XIX: only mirror symmetry Definitions • Transformation, Group • Évariste Galois 1811, 1832. Symmetry: Property of invariance of an objet under a space transformation Transformation • Bijection which maps a geometric set in itself M f(M)=M’ • Affine transformation maps two points P and P’ such that: f(M) = P’ + O(PM) P’ P P f : positions O : vectors Isometries f(M) = P’ + O(PM) • Isometry ||O(u)||=||u|| distance-preserving map • Two types of isometry: • Affine isometry: f(M) • Transforms points – space groups • Microscopic properties of crystals (electronic structure) • Translation • Helix of pitch P • Rotations • Reflections (a, Pa /2p) • Linear isometry O(PM) • Transforms vectors (directions) – point groups • Macroscopic properties of crystals (response functions) 60° • Rotations E ? • Reflections Linear isometry- 2D ||O(u)|| = ||u|| • In the plane (2D) • Rotations • Reflections (reflections through an axis) q q/2 • Determinant +1 • Determinant -1 • Eigenvalues eiq, e-iq • Eigenvalues -1, 1 Linear isometry - 3D • ||O(u)|| = |l| ||u|| Eigenvalues |l | = 1 • In space (3D) : • l : 3rd degree equation (real coefficients) ±1, eiq, e-iq (det. = ± 1) • det. = 1 • det. = -1 • Direct symmetry • Indirect symmetry ퟏ ퟎ ퟎ −ퟏ ퟎ ퟎ ퟎ cos 휽 − sin 휽 ퟎ cos 휽 − sin 휽 ퟎ sin 휽 cos 휽 ퟎ sin 휽 cos 휽 Rotations Rotoreflections a) Rotation by angle q q q b) Roto-reflection q Improper rotation c) Inversion (p) q d) Roto-inversion (p+q ) c) Reflection (0) Stereographic projection • To represent directions preserves angles on the sphere NN Direction OM M O P’ P P’ M’ P P, projection of OM : Intersection of SM and equator S • Conform transformation (preserves angles locally) but not affine Main symmetry operations • Conventionally • Direct • Rotations (A ) p n • n-fold rotation An (2 /n) • Reflections (M) • Represented by a polygon of same symmetry.