Euclidean Group - Wikipedia, the Free Encyclopedia Page 1 of 6
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Glide and Screw
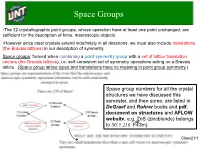
Space Groups •The 32 crystallographic point groups, whose operation have at least one point unchanged, are sufficient for the description of finite, macroscopic objects. •However since ideal crystals extend indefinitely in all directions, we must also include translations (the Bravais lattices) in our description of symmetry. Space groups: formed when combining a point symmetry group with a set of lattice translation vectors (the Bravais lattices), i.e. self-consistent set of symmetry operations acting on a Bravais lattice. (Space group lattice types and translations have no meaning in point group symmetry.) Space group numbers for all the crystal structures we have discussed this semester, and then some, are listed in DeGraef and Rohrer books and pdf. document on structures and AFLOW website, e.g. ZnS (zincblende) belongs to SG # 216: F43m) Class21/1 Screw Axes •The combination of point group symmetries and translations also leads to two additional operators known as glide and screw. •The screw operation is a combination of a rotation and a translation parallel to the rotation axis. •As for simple rotations, only diad, triad, tetrad and hexad axes, that are consistent with Bravais lattice translation vectors can be used for a screw operator. •In addition, the translation on each rotation must be a rational fraction of the entire translation. •There is no combination of rotations or translations that can transform the pattern produced by 31 to the pattern of 32 , and 41 to the pattern of 43, etc. •Thus, the screw operation results in handedness Class21/2 or chirality (can’t superimpose image on another, e.g., mirror image) to the pattern. -

Affine Reflection Group Codes
Affine Reflection Group Codes Terasan Niyomsataya1, Ali Miri1,2 and Monica Nevins2 School of Information Technology and Engineering (SITE)1 Department of Mathematics and Statistics2 University of Ottawa, Ottawa, Canada K1N 6N5 email: {tniyomsa,samiri}@site.uottawa.ca, [email protected] Abstract This paper presents a construction of Slepian group codes from affine reflection groups. The solution to the initial vector and nearest distance problem is presented for all irreducible affine reflection groups of rank n ≥ 2, for varying stabilizer subgroups. Moreover, we use a detailed analysis of the geometry of affine reflection groups to produce an efficient decoding algorithm which is equivalent to the maximum-likelihood decoder. Its complexity depends only on the dimension of the vector space containing the codewords, and not on the number of codewords. We give several examples of the decoding algorithm, both to demonstrate its correctness and to show how, in small rank cases, it may be further streamlined by exploiting additional symmetries of the group. 1 1 Introduction Slepian [11] introduced group codes whose codewords represent a finite set of signals combining coding and modulation, for the Gaussian channel. A thorough survey of group codes can be found in [8]. The codewords lie on a sphere in n−dimensional Euclidean space Rn with equal nearest-neighbour distances. This gives congruent maximum-likelihood (ML) decoding regions, and hence equal error probability, for all codewords. Given a group G with a representation (action) on Rn, that is, an 1Keywords: Group codes, initial vector problem, decoding schemes, affine reflection groups 1 orthogonal n × n matrix Og for each g ∈ G, a group code generated from G is given by the set of all cg = Ogx0 (1) n for all g ∈ G where x0 = (x1, . -

Frieze Groups Tara Mccabe Denis Mortell
Frieze Groups Tara McCabe Denis Mortell Introduction Our chosen topic is frieze groups. A frieze group is an infinite discrete group of symmetries, i.e. the set of the geometric transformations that are composed of rigid motions and reflections that preserve the pattern. A frieze pattern is a two-dimensional design that repeats in one direction. A study on these groups was published in 1969 by Coxeter and Conway. Although they had been studied by Gauss prior to this, Gauss did not publish his studies. Instead, they were found in his private notes years after his death. Visual Perspective Numerical Perspective What second-row numbers validate a frieze pattern? (F) There are seven types of groups. Each of these are the A frieze pattern is an array of natural numbers, displayed in a symmetry group of a frieze pattern. They have been lattice such that the top and bottom lines are composed only of The second-row numbers that determine the pattern are not illustrated below using the Conway notation and 1’s and for each unit diamond, random. Instead, these numbers have a peculiar property. corresponding diagrams: the rule (bc) − (ad) = 1 holds. Theorem I Fifth being a translation I The first, and the one There is a bijection between the valid which must occur in with vertical reflection, Here is an example of a frieze pattern: sequences for frieze patterns and all others is glide reflection and 180◦ rotation, or a the number of triangles adjacent to the Translation, or a vertices of a triangulated polygon. [2] ‘hop’. -

The Unitary Representations of the Poincaré Group in Any Spacetime
The unitary representations of the Poincar´e group in any spacetime dimension Xavier Bekaert a and Nicolas Boulanger b a Institut Denis Poisson, Unit´emixte de Recherche 7013, Universit´ede Tours, Universit´ed’Orl´eans, CNRS, Parc de Grandmont, 37200 Tours (France) [email protected] b Service de Physique de l’Univers, Champs et Gravitation Universit´ede Mons – UMONS, Place du Parc 20, 7000 Mons (Belgium) [email protected] An extensive group-theoretical treatment of linear relativistic field equa- tions on Minkowski spacetime of arbitrary dimension D > 2 is presented in these lecture notes. To start with, the one-to-one correspondence be- tween linear relativistic field equations and unitary representations of the isometry group is reviewed. In turn, the method of induced representa- tions reduces the problem of classifying the representations of the Poincar´e group ISO(D 1, 1) to the classification of the representations of the sta- − bility subgroups only. Therefore, an exhaustive treatment of the two most important classes of unitary irreducible representations, corresponding to massive and massless particles (the latter class decomposing in turn into the “helicity” and the “infinite-spin” representations) may be performed via the well-known representation theory of the orthogonal groups O(n) (with D 4 <n<D ). Finally, covariant field equations are given for each − unitary irreducible representation of the Poincar´egroup with non-negative arXiv:hep-th/0611263v2 13 Jun 2021 mass-squared. Tachyonic representations are also examined. All these steps are covered in many details and with examples. The present notes also include a self-contained review of the representation theory of the general linear and (in)homogeneous orthogonal groups in terms of Young diagrams. -

Group Theory
Appendix A Group Theory This appendix is a survey of only those topics in group theory that are needed to understand the composition of symmetry transformations and its consequences for fundamental physics. It is intended to be self-contained and covers those topics that are needed to follow the main text. Although in the end this appendix became quite long, a thorough understanding of group theory is possible only by consulting the appropriate literature in addition to this appendix. In order that this book not become too lengthy, proofs of theorems were largely omitted; again I refer to other monographs. From its very title, the book by H. Georgi [211] is the most appropriate if particle physics is the primary focus of interest. The book by G. Costa and G. Fogli [102] is written in the same spirit. Both books also cover the necessary group theory for grand unification ideas. A very comprehensive but also rather dense treatment is given by [428]. Still a classic is [254]; it contains more about the treatment of dynamical symmetries in quantum mechanics. A.1 Basics A.1.1 Definitions: Algebraic Structures From the structureless notion of a set, one can successively generate more and more algebraic structures. Those that play a prominent role in physics are defined in the following. Group A group G is a set with elements gi and an operation ◦ (called group multiplication) with the properties that (i) the operation is closed: gi ◦ g j ∈ G, (ii) a neutral element g0 ∈ G exists such that gi ◦ g0 = g0 ◦ gi = gi , (iii) for every gi exists an −1 ∈ ◦ −1 = = −1 ◦ inverse element gi G such that gi gi g0 gi gi , (iv) the operation is associative: gi ◦ (g j ◦ gk) = (gi ◦ g j ) ◦ gk. -

Molecular Symmetry
Molecular Symmetry Symmetry helps us understand molecular structure, some chemical properties, and characteristics of physical properties (spectroscopy) – used with group theory to predict vibrational spectra for the identification of molecular shape, and as a tool for understanding electronic structure and bonding. Symmetrical : implies the species possesses a number of indistinguishable configurations. 1 Group Theory : mathematical treatment of symmetry. symmetry operation – an operation performed on an object which leaves it in a configuration that is indistinguishable from, and superimposable on, the original configuration. symmetry elements – the points, lines, or planes to which a symmetry operation is carried out. Element Operation Symbol Identity Identity E Symmetry plane Reflection in the plane σ Inversion center Inversion of a point x,y,z to -x,-y,-z i Proper axis Rotation by (360/n)° Cn 1. Rotation by (360/n)° Improper axis S 2. Reflection in plane perpendicular to rotation axis n Proper axes of rotation (C n) Rotation with respect to a line (axis of rotation). •Cn is a rotation of (360/n)°. •C2 = 180° rotation, C 3 = 120° rotation, C 4 = 90° rotation, C 5 = 72° rotation, C 6 = 60° rotation… •Each rotation brings you to an indistinguishable state from the original. However, rotation by 90° about the same axis does not give back the identical molecule. XeF 4 is square planar. Therefore H 2O does NOT possess It has four different C 2 axes. a C 4 symmetry axis. A C 4 axis out of the page is called the principle axis because it has the largest n . By convention, the principle axis is in the z-direction 2 3 Reflection through a planes of symmetry (mirror plane) If reflection of all parts of a molecule through a plane produced an indistinguishable configuration, the symmetry element is called a mirror plane or plane of symmetry . -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

Matrix Lie Groups
Maths Seminar 2007 MATRIX LIE GROUPS Claudiu C Remsing Dept of Mathematics (Pure and Applied) Rhodes University Grahamstown 6140 26 September 2007 RhodesUniv CCR 0 Maths Seminar 2007 TALK OUTLINE 1. What is a matrix Lie group ? 2. Matrices revisited. 3. Examples of matrix Lie groups. 4. Matrix Lie algebras. 5. A glimpse at elementary Lie theory. 6. Life beyond elementary Lie theory. RhodesUniv CCR 1 Maths Seminar 2007 1. What is a matrix Lie group ? Matrix Lie groups are groups of invertible • matrices that have desirable geometric features. So matrix Lie groups are simultaneously algebraic and geometric objects. Matrix Lie groups naturally arise in • – geometry (classical, algebraic, differential) – complex analyis – differential equations – Fourier analysis – algebra (group theory, ring theory) – number theory – combinatorics. RhodesUniv CCR 2 Maths Seminar 2007 Matrix Lie groups are encountered in many • applications in – physics (geometric mechanics, quantum con- trol) – engineering (motion control, robotics) – computational chemistry (molecular mo- tion) – computer science (computer animation, computer vision, quantum computation). “It turns out that matrix [Lie] groups • pop up in virtually any investigation of objects with symmetries, such as molecules in chemistry, particles in physics, and projective spaces in geometry”. (K. Tapp, 2005) RhodesUniv CCR 3 Maths Seminar 2007 EXAMPLE 1 : The Euclidean group E (2). • E (2) = F : R2 R2 F is an isometry . → | n o The vector space R2 is equipped with the standard Euclidean structure (the “dot product”) x y = x y + x y (x, y R2), • 1 1 2 2 ∈ hence with the Euclidean distance d (x, y) = (y x) (y x) (x, y R2). -

Feature Matching and Heat Flow in Centro-Affine Geometry
Symmetry, Integrability and Geometry: Methods and Applications SIGMA 16 (2020), 093, 22 pages Feature Matching and Heat Flow in Centro-Affine Geometry Peter J. OLVER y, Changzheng QU z and Yun YANG x y School of Mathematics, University of Minnesota, Minneapolis, MN 55455, USA E-mail: [email protected] URL: http://www.math.umn.edu/~olver/ z School of Mathematics and Statistics, Ningbo University, Ningbo 315211, P.R. China E-mail: [email protected] x Department of Mathematics, Northeastern University, Shenyang, 110819, P.R. China E-mail: [email protected] Received April 02, 2020, in final form September 14, 2020; Published online September 29, 2020 https://doi.org/10.3842/SIGMA.2020.093 Abstract. In this paper, we study the differential invariants and the invariant heat flow in centro-affine geometry, proving that the latter is equivalent to the inviscid Burgers' equa- tion. Furthermore, we apply the centro-affine invariants to develop an invariant algorithm to match features of objects appearing in images. We show that the resulting algorithm com- pares favorably with the widely applied scale-invariant feature transform (SIFT), speeded up robust features (SURF), and affine-SIFT (ASIFT) methods. Key words: centro-affine geometry; equivariant moving frames; heat flow; inviscid Burgers' equation; differential invariant; edge matching 2020 Mathematics Subject Classification: 53A15; 53A55 1 Introduction The main objective in this paper is to study differential invariants and invariant curve flows { in particular the heat flow { in centro-affine geometry. In addition, we will present some basic applications to feature matching in camera images of three-dimensional objects, comparing our method with other popular algorithms. -

Chapter 1 – Symmetry of Molecules – P. 1
Chapter 1 – Symmetry of Molecules – p. 1 - 1. Symmetry of Molecules 1.1 Symmetry Elements · Symmetry operation: Operation that transforms a molecule to an equivalent position and orientation, i.e. after the operation every point of the molecule is coincident with an equivalent point. · Symmetry element: Geometrical entity (line, plane or point) which respect to which one or more symmetry operations can be carried out. In molecules there are only four types of symmetry elements or operations: · Mirror planes: reflection with respect to plane; notation: s · Center of inversion: inversion of all atom positions with respect to inversion center, notation i · Proper axis: Rotation by 2p/n with respect to the axis, notation Cn · Improper axis: Rotation by 2p/n with respect to the axis, followed by reflection with respect to plane, perpendicular to axis, notation Sn Formally, this classification can be further simplified by expressing the inversion i as an improper rotation S2 and the reflection s as an improper rotation S1. Thus, the only symmetry elements in molecules are Cn and Sn. Important: Successive execution of two symmetry operation corresponds to another symmetry operation of the molecule. In order to make this statement a general rule, we require one more symmetry operation, the identity E. (1.1: Symmetry elements in CH4, successive execution of symmetry operations) 1.2. Systematic classification by symmetry groups According to their inherent symmetry elements, molecules can be classified systematically in so called symmetry groups. We use the so-called Schönfliess notation to name the groups, Chapter 1 – Symmetry of Molecules – p. 2 - which is the usual notation for molecules. -

The Affine Group of a Lie Group
THE AFFINE GROUP OF A LIE GROUP JOSEPH A. WOLF1 1. If G is a Lie group, then the group Aut(G) of all continuous auto- morphisms of G has a natural Lie group structure. This gives the semi- direct product A(G) = G-Aut(G) the structure of a Lie group. When G is a vector group R", A(G) is the ordinary affine group A(re). Follow- ing L. Auslander [l ] we will refer to A(G) as the affine group of G, and regard it as a transformation group on G by (g, a): h-^g-a(h) where g, hEG and aGAut(G) ; in the case of a vector group, this is the usual action on A(») on R". If B is a compact subgroup of A(n), then it is well known that B has a fixed point on R", i.e., that there is a point xGR" such that b(x)=x for every bEB. For A(ra) is contained in the general linear group GL(« + 1, R) in the usual fashion, and B (being compact) must be conjugate to a subgroup of the orthogonal group 0(w + l). This conjugation can be done leaving fixed the (« + 1, w + 1)-place matrix entries, and is thus possible by an element of k(n). This done, the translation-parts of elements of B must be zero, proving the assertion. L. Auslander [l] has extended this theorem to compact abelian subgroups of A(G) when G is connected, simply connected and nil- potent. We will give a further extension. -

COXETER GROUPS (Unfinished and Comments Are Welcome)
COXETER GROUPS (Unfinished and comments are welcome) Gert Heckman Radboud University Nijmegen [email protected] October 10, 2018 1 2 Contents Preface 4 1 Regular Polytopes 7 1.1 ConvexSets............................ 7 1.2 Examples of Regular Polytopes . 12 1.3 Classification of Regular Polytopes . 16 2 Finite Reflection Groups 21 2.1 NormalizedRootSystems . 21 2.2 The Dihedral Normalized Root System . 24 2.3 TheBasisofSimpleRoots. 25 2.4 The Classification of Elliptic Coxeter Diagrams . 27 2.5 TheCoxeterElement. 35 2.6 A Dihedral Subgroup of W ................... 39 2.7 IntegralRootSystems . 42 2.8 The Poincar´eDodecahedral Space . 46 3 Invariant Theory for Reflection Groups 53 3.1 Polynomial Invariant Theory . 53 3.2 TheChevalleyTheorem . 56 3.3 Exponential Invariant Theory . 60 4 Coxeter Groups 65 4.1 Generators and Relations . 65 4.2 TheTitsTheorem ........................ 69 4.3 The Dual Geometric Representation . 74 4.4 The Classification of Some Coxeter Diagrams . 77 4.5 AffineReflectionGroups. 86 4.6 Crystallography. .. .. .. .. .. .. .. 92 5 Hyperbolic Reflection Groups 97 5.1 HyperbolicSpace......................... 97 5.2 Hyperbolic Coxeter Groups . 100 5.3 Examples of Hyperbolic Coxeter Diagrams . 108 5.4 Hyperbolic reflection groups . 114 5.5 Lorentzian Lattices . 116 3 6 The Leech Lattice 125 6.1 ModularForms ..........................125 6.2 ATheoremofVenkov . 129 6.3 The Classification of Niemeier Lattices . 132 6.4 The Existence of the Leech Lattice . 133 6.5 ATheoremofConway . 135 6.6 TheCoveringRadiusofΛ . 137 6.7 Uniqueness of the Leech Lattice . 140 4 Preface Finite reflection groups are a central subject in mathematics with a long and rich history. The group of symmetries of a regular m-gon in the plane, that is the convex hull in the complex plane of the mth roots of unity, is the dihedral group of order 2m, which is the simplest example of a reflection Dm group.