COXETER GROUPS (Unfinished and Comments Are Welcome)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Glide and Screw
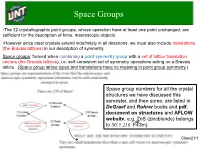
Space Groups •The 32 crystallographic point groups, whose operation have at least one point unchanged, are sufficient for the description of finite, macroscopic objects. •However since ideal crystals extend indefinitely in all directions, we must also include translations (the Bravais lattices) in our description of symmetry. Space groups: formed when combining a point symmetry group with a set of lattice translation vectors (the Bravais lattices), i.e. self-consistent set of symmetry operations acting on a Bravais lattice. (Space group lattice types and translations have no meaning in point group symmetry.) Space group numbers for all the crystal structures we have discussed this semester, and then some, are listed in DeGraef and Rohrer books and pdf. document on structures and AFLOW website, e.g. ZnS (zincblende) belongs to SG # 216: F43m) Class21/1 Screw Axes •The combination of point group symmetries and translations also leads to two additional operators known as glide and screw. •The screw operation is a combination of a rotation and a translation parallel to the rotation axis. •As for simple rotations, only diad, triad, tetrad and hexad axes, that are consistent with Bravais lattice translation vectors can be used for a screw operator. •In addition, the translation on each rotation must be a rational fraction of the entire translation. •There is no combination of rotations or translations that can transform the pattern produced by 31 to the pattern of 32 , and 41 to the pattern of 43, etc. •Thus, the screw operation results in handedness Class21/2 or chirality (can’t superimpose image on another, e.g., mirror image) to the pattern. -

JMM 2017 Student Poster Session Abstract Book
Abstracts for the MAA Undergraduate Poster Session Atlanta, GA January 6, 2017 Organized by Eric Ruggieri College of the Holy Cross and Chasen Smith Georgia Southern University Organized by the MAA Committee on Undergraduate Student Activities and Chapters and CUPM Subcommittee on Research by Undergraduates Dear Students, Advisors, Judges and Colleagues, If you look around today you will see over 300 posters and nearly 500 student presenters, representing a wide array of mathematical topics and ideas. These posters showcase the vibrant research being conducted as part of summer programs and during the academic year at colleges and universities from across the United States and beyond. It is so rewarding to see this session, which offers such a great opportunity for interaction between students and professional mathematicians, continue to grow. The judges you see here today are professional mathematicians from institutions around the world. They are advisors, colleagues, new Ph.D.s, and administrators. We have acknowledged many of them in this booklet; however, many judges here volunteered on site. Their support is vital to the success of the session and we thank them. We are supported financially by Tudor Investments and Two Sigma. We are also helped by the mem- bers of the Committee on Undergraduate Student Activities and Chapters (CUSAC) in some way or other. They are: Dora C. Ahmadi; Jennifer Bergner; Benjamin Galluzzo; Kristina Cole Garrett; TJ Hitchman; Cynthia Huffman; Aihua Li; Sara Louise Malec; Lisa Marano; May Mei; Stacy Ann Muir; Andy Nieder- maier; Pamela A. Richardson; Jennifer Schaefer; Peri Shereen; Eve Torrence; Violetta Vasilevska; Gerard A. -

Matroid Automorphisms of the F4 Root System
∗ Matroid automorphisms of the F4 root system Stephanie Fried Aydin Gerek Gary Gordon Dept. of Mathematics Dept. of Mathematics Dept. of Mathematics Grinnell College Lehigh University Lafayette College Grinnell, IA 50112 Bethlehem, PA 18015 Easton, PA 18042 [email protected] [email protected] Andrija Peruniˇci´c Dept. of Mathematics Bard College Annandale-on-Hudson, NY 12504 [email protected] Submitted: Feb 11, 2007; Accepted: Oct 20, 2007; Published: Nov 12, 2007 Mathematics Subject Classification: 05B35 Dedicated to Thomas Brylawski. Abstract Let F4 be the root system associated with the 24-cell, and let M(F4) be the simple linear dependence matroid corresponding to this root system. We determine the automorphism group of this matroid and compare it to the Coxeter group W for the root system. We find non-geometric automorphisms that preserve the matroid but not the root system. 1 Introduction Given a finite set of vectors in Euclidean space, we consider the linear dependence matroid of the set, where dependences are taken over the reals. When the original set of vectors has `nice' symmetry, it makes sense to compare the geometric symmetry (the Coxeter or Weyl group) with the group that preserves sets of linearly independent vectors. This latter group is precisely the automorphism group of the linear matroid determined by the given vectors. ∗Research supported by NSF grant DMS-055282. the electronic journal of combinatorics 14 (2007), #R78 1 For the root systems An and Bn, matroid automorphisms do not give any additional symmetry [4]. One can interpret these results in the following way: combinatorial sym- metry (preserving dependence) and geometric symmetry (via isometries of the ambient Euclidean space) are essentially the same. -
Group Theory Applied to Crystallography
International Union of Crystallography Commission on Mathematical and Theoretical Crystallography Summer School on Mathematical and Theoretical Crystallography 27 April - 2 May 2008, Gargnano, Italy Group theory applied to crystallography Bernd Souvignier Institute for Mathematics, Astrophysics and Particle Physics Radboud University Nijmegen The Netherlands 29 April 2008 2 CONTENTS Contents 1 Introduction 3 2 Elements of space groups 5 2.1 Linearmappings .................................. 5 2.2 Affinemappings................................... 8 2.3 AffinegroupandEuclideangroup . .... 9 2.4 Matrixnotation .................................. 12 3 Analysis of space groups 14 3.1 Lattices ....................................... 14 3.2 Pointgroups..................................... 17 3.3 Transformationtoalatticebasis . ....... 19 3.4 Systemsofnonprimitivetranslations . ......... 22 4 Construction of space groups 25 4.1 Shiftoforigin................................... 25 4.2 Determining systems of nonprimitivetranslations . ............. 27 4.3 Normalizeraction................................ .. 31 5 Space group classification 35 5.1 Spacegrouptypes................................. 35 5.2 Arithmeticclasses............................... ... 36 5.3 Bravaisflocks.................................... 37 5.4 Geometricclasses................................ .. 39 5.5 Latticesystems .................................. 41 5.6 Crystalsystems .................................. 41 5.7 Crystalfamilies ................................. .. 42 6 Site-symmetry -

Molecular Symmetry
Molecular Symmetry Symmetry helps us understand molecular structure, some chemical properties, and characteristics of physical properties (spectroscopy) – used with group theory to predict vibrational spectra for the identification of molecular shape, and as a tool for understanding electronic structure and bonding. Symmetrical : implies the species possesses a number of indistinguishable configurations. 1 Group Theory : mathematical treatment of symmetry. symmetry operation – an operation performed on an object which leaves it in a configuration that is indistinguishable from, and superimposable on, the original configuration. symmetry elements – the points, lines, or planes to which a symmetry operation is carried out. Element Operation Symbol Identity Identity E Symmetry plane Reflection in the plane σ Inversion center Inversion of a point x,y,z to -x,-y,-z i Proper axis Rotation by (360/n)° Cn 1. Rotation by (360/n)° Improper axis S 2. Reflection in plane perpendicular to rotation axis n Proper axes of rotation (C n) Rotation with respect to a line (axis of rotation). •Cn is a rotation of (360/n)°. •C2 = 180° rotation, C 3 = 120° rotation, C 4 = 90° rotation, C 5 = 72° rotation, C 6 = 60° rotation… •Each rotation brings you to an indistinguishable state from the original. However, rotation by 90° about the same axis does not give back the identical molecule. XeF 4 is square planar. Therefore H 2O does NOT possess It has four different C 2 axes. a C 4 symmetry axis. A C 4 axis out of the page is called the principle axis because it has the largest n . By convention, the principle axis is in the z-direction 2 3 Reflection through a planes of symmetry (mirror plane) If reflection of all parts of a molecule through a plane produced an indistinguishable configuration, the symmetry element is called a mirror plane or plane of symmetry . -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

European Journal of Combinatorics a Survey on Spherical Designs And
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector European Journal of Combinatorics 30 (2009) 1392–1425 Contents lists available at ScienceDirect European Journal of Combinatorics journal homepage: www.elsevier.com/locate/ejc A survey on spherical designs and algebraic combinatorics on spheres Eiichi Bannai a, Etsuko Bannai b a Faculty of Mathematics, Graduate School, Kyushu University, Hakozaki 6-10-1, Higashu-ku, Fukuoka, 812-8581, Japan b Misakigaoka 2-8-21, Maebaru-shi, Fukuoka, 819-1136, Japan article info a b s t r a c t Article history: This survey is mainly intended for non-specialists, though we try to Available online 12 February 2009 include many recent developments that may interest the experts as well. We want to study ``good'' finite subsets of the unit sphere. To consider ``what is good'' is a part of our problem. We start with n−1 n the definition of spherical t-designs on S in R : After discussing some important examples, we focus on tight spherical t-designs on Sn−1: Tight t-designs have good combinatorial properties, but they rarely exist. So, we are interested in the finite subsets on Sn−1, which have properties similar to tight t-designs from the various viewpoints of algebraic combinatorics. For example, rigid t-designs, universally optimal t-codes (configurations), as well as finite sets which admit the structure of an association scheme, are among them. We will discuss various results on the existence and the non-existence of special spherical t-designs, as well as general spherical t-designs, and their constructions. -

Binary Icosahedral Group and 600-Cell
Article Binary Icosahedral Group and 600-Cell Jihyun Choi and Jae-Hyouk Lee * Department of Mathematics, Ewha Womans University 52, Ewhayeodae-gil, Seodaemun-gu, Seoul 03760, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-2-3277-3346 Received: 10 July 2018; Accepted: 26 July 2018; Published: 7 August 2018 Abstract: In this article, we have an explicit description of the binary isosahedral group as a 600-cell. We introduce a method to construct binary polyhedral groups as a subset of quaternions H via spin map of SO(3). In addition, we show that the binary icosahedral group in H is the set of vertices of a 600-cell by applying the Coxeter–Dynkin diagram of H4. Keywords: binary polyhedral group; icosahedron; dodecahedron; 600-cell MSC: 52B10, 52B11, 52B15 1. Introduction The classification of finite subgroups in SLn(C) derives attention from various research areas in mathematics. Especially when n = 2, it is related to McKay correspondence and ADE singularity theory [1]. The list of finite subgroups of SL2(C) consists of cyclic groups (Zn), binary dihedral groups corresponded to the symmetry group of regular 2n-gons, and binary polyhedral groups related to regular polyhedra. These are related to the classification of regular polyhedrons known as Platonic solids. There are five platonic solids (tetrahedron, cubic, octahedron, dodecahedron, icosahedron), but, as a regular polyhedron and its dual polyhedron are associated with the same symmetry groups, there are only three binary polyhedral groups(binary tetrahedral group 2T, binary octahedral group 2O, binary icosahedral group 2I) related to regular polyhedrons. -

Computing Invariants of Hyperbolic Coxeter Groups
LMS J. Comput. Math. 18 (1) (2015) 754{773 C 2015 Author doi:10.1112/S1461157015000273 CoxIter { Computing invariants of hyperbolic Coxeter groups R. Guglielmetti Abstract CoxIter is a computer program designed to compute invariants of hyperbolic Coxeter groups. Given such a group, the program determines whether it is cocompact or of finite covolume, whether it is arithmetic in the non-cocompact case, and whether it provides the Euler characteristic and the combinatorial structure of the associated fundamental polyhedron. The aim of this paper is to present the theoretical background for the program. The source code is available online as supplementary material with the published article and on the author's website (http://coxiter.rgug.ch). Supplementarymaterialsareavailablewiththisarticle. Introduction Let Hn be the hyperbolic n-space, and let Isom Hn be the group of isometries of Hn. For a given discrete hyperbolic Coxeter group Γ < Isom Hn and its associated fundamental polyhedron P ⊂ Hn, we are interested in geometrical and combinatorial properties of P . We want to know whether P is compact, has finite volume and, if the answer is yes, what its volume is. We also want to find the combinatorial structure of P , namely, the number of vertices, edges, 2-faces, and so on. Finally, it is interesting to find out whether Γ is arithmetic, that is, if Γ is commensurable to the reflection group of the automorphism group of a quadratic form of signature (n; 1). Most of these questions can be answered by studying finite and affine subgroups of Γ, but this involves a huge number of computations. -

Petrie Schemes
Canad. J. Math. Vol. 57 (4), 2005 pp. 844–870 Petrie Schemes Gordon Williams Abstract. Petrie polygons, especially as they arise in the study of regular polytopes and Coxeter groups, have been studied by geometers and group theorists since the early part of the twentieth century. An open question is the determination of which polyhedra possess Petrie polygons that are simple closed curves. The current work explores combinatorial structures in abstract polytopes, called Petrie schemes, that generalize the notion of a Petrie polygon. It is established that all of the regular convex polytopes and honeycombs in Euclidean spaces, as well as all of the Grunbaum–Dress¨ polyhedra, pos- sess Petrie schemes that are not self-intersecting and thus have Petrie polygons that are simple closed curves. Partial results are obtained for several other classes of less symmetric polytopes. 1 Introduction Historically, polyhedra have been conceived of either as closed surfaces (usually topo- logical spheres) made up of planar polygons joined edge to edge or as solids enclosed by such a surface. In recent times, mathematicians have considered polyhedra to be convex polytopes, simplicial spheres, or combinatorial structures such as abstract polytopes or incidence complexes. A Petrie polygon of a polyhedron is a sequence of edges of the polyhedron where any two consecutive elements of the sequence have a vertex and face in common, but no three consecutive edges share a commonface. For the regular polyhedra, the Petrie polygons form the equatorial skew polygons. Petrie polygons may be defined analogously for polytopes as well. Petrie polygons have been very useful in the study of polyhedra and polytopes, especially regular polytopes. -

Arxiv:1705.01294V1
Branes and Polytopes Luca Romano email address: [email protected] ABSTRACT We investigate the hierarchies of half-supersymmetric branes in maximal supergravity theories. By studying the action of the Weyl group of the U-duality group of maximal supergravities we discover a set of universal algebraic rules describing the number of independent 1/2-BPS p-branes, rank by rank, in any dimension. We show that these relations describe the symmetries of certain families of uniform polytopes. This induces a correspondence between half-supersymmetric branes and vertices of opportune uniform polytopes. We show that half-supersymmetric 0-, 1- and 2-branes are in correspondence with the vertices of the k21, 2k1 and 1k2 families of uniform polytopes, respectively, while 3-branes correspond to the vertices of the rectified version of the 2k1 family. For 4-branes and higher rank solutions we find a general behavior. The interpretation of half- supersymmetric solutions as vertices of uniform polytopes reveals some intriguing aspects. One of the most relevant is a triality relation between 0-, 1- and 2-branes. arXiv:1705.01294v1 [hep-th] 3 May 2017 Contents Introduction 2 1 Coxeter Group and Weyl Group 3 1.1 WeylGroup........................................ 6 2 Branes in E11 7 3 Algebraic Structures Behind Half-Supersymmetric Branes 12 4 Branes ad Polytopes 15 Conclusions 27 A Polytopes 30 B Petrie Polygons 30 1 Introduction Since their discovery branes gained a prominent role in the analysis of M-theories and du- alities [1]. One of the most important class of branes consists in Dirichlet branes, or D-branes. D-branes appear in string theory as boundary terms for open strings with mixed Dirichlet-Neumann boundary conditions and, due to their tension, scaling with a negative power of the string cou- pling constant, they are non-perturbative objects [2]. -

Regular Polyhedra Through Time
Fields Institute I. Hubard Polytopes, Maps and their Symmetries September 2011 Regular polyhedra through time The greeks were the first to study the symmetries of polyhedra. Euclid, in his Elements showed that there are only five regular solids (that can be seen in Figure 1). In this context, a polyhe- dron is regular if all its polygons are regular and equal, and you can find the same number of them at each vertex. Figure 1: Platonic Solids. It is until 1619 that Kepler finds other two regular polyhedra: the great dodecahedron and the great icosahedron (on Figure 2. To do so, he allows \false" vertices and intersection of the (convex) faces of the polyhedra at points that are not vertices of the polyhedron, just as the I. Hubard Polytopes, Maps and their Symmetries Page 1 Figure 2: Kepler polyhedra. 1619. pentagram allows intersection of edges at points that are not vertices of the polygon. In this way, the vertex-figure of these two polyhedra are pentagrams (see Figure 3). Figure 3: A regular convex pentagon and a pentagram, also regular! In 1809 Poinsot re-discover Kepler's polyhedra, and discovers its duals: the small stellated dodecahedron and the great stellated dodecahedron (that are shown in Figure 4). The faces of such duals are pentagrams, and are organized on a \convex" way around each vertex. Figure 4: The other two Kepler-Poinsot polyhedra. 1809. A couple of years later Cauchy showed that these are the only four regular \star" polyhedra. We note that the convex hull of the great dodecahedron, great icosahedron and small stellated dodecahedron is the icosahedron, while the convex hull of the great stellated dodecahedron is the dodecahedron.