Modelling Commercial Vehicle Handling and Rolling Stability
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Sp057 Leaf Spring Installation
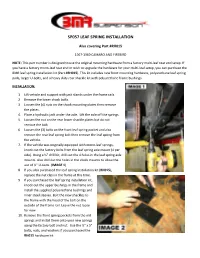
SP057 LEAF SPRING INSTALLATION Also covering Part #RH015 1967-1969 CAMARO AND FIREBIRD NOTE: This part number is designed to use the original mounting hardware from a factory multi-leaf rear end setup. If you have a factory mono-leaf rear end or wish to upgrade the hardware for your multi-leaf setup, you can purchase the BMR leaf spring installation kit (Part #RH015). This kit includes new front mounting hardware, polyurethane leaf spring pads, larger U-bolts, and a heavy duty rear shackle kit with polyurethane frame bushings. INSTALLATION: 1. Lift vehicle and support with jack stands under the frame rails. 2. Remove the lower shock bolts. 3. Loosen the (4) nuts on the shock mounting plates then remove the plates. 4. Place a hydraulic jack under the axle. Lift the axle off the springs. 5. Loosen the nut on the rear lower shackle plates but do not remove the bolt. 6. Loosen the (3) bolts on the front leaf spring pocket and also remove the rear leaf spring bolt then remove the leaf spring from the vehicle. 7. If the vehicle was originally equipped with mono-leaf springs, knock out the factory bolts from the leaf spring axle mount (4 per side). Using a ½” drill bit, drill out the 4 holes in the leaf spring axle mounts. Also drill out the holes in the shock mounts to allow the use of ½” U-bolts. (IMAGE 1) 8. If you also purchased the leaf spring installation kit (RH015), replace the nut clips in the frame at this time. 9. If you purchased the leaf spring installation kit, knock out the upper bushings in the frame and install the supplied polyurethane bushings and inner steel sleeves. -

Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle Using Adams /C Ar
ADAPTION AND EVALUATION OF TRANSVERSAL LEAF SPRING SUSPENSION DESIGN FOR A LIGHTWEIGHT VEHICLE USING ADAMS /C AR FLORIAN CHRIST Master Thesis in Vehicle Engineering Vehicle Dynamics Aeronautical and Vehicle Engineering Royal Institute of Technology TRITA-AVE 2015:09 ISSN 1651-7660 Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle using Adams/Car FLORIAN CHRIST © Florian Christ, 2015. Vehicle Dynamics Department of Aeronautical and Vehicle Engineering Kungliga Tekniska Högskolan SE-100 44 Stockholm Sweden ii Abstract This investigation deals with the suspension of a lightweight medium-class vehicle for four passengers with a curb weight of 1000 kg. The suspension layout consists of a transversal leaf spring and is supported by an active air spring which is included in the damper. The lower control arms are replaced by the leaf spring ends. Active ride height control is introduced to compensate for different vehicle load states. Active steering is applied using electric linear actuators with steer-by wire design. Besides intense use of light material the inquiry should investigate whether elimination of suspension parts or a lighter component is concordant with the stability demands of the vehicle. The investigation is based on simulations obtained with MSC Software ADAMS/Car and Matlab. The suspension is modeled in Adams/Car and has to proof it's compliance in normal driving conditions and under extreme forces. Evaluation criteria are suspension kinematics and compliance such as camber, caster and toe change during wheel travel in different load states. Also the leaf spring deflection, anti-dive and anti-squat measures and brake force distribution are investigated. -

Mini-Tub Leaf-Spring Rear Suspension for 1964-70 Mustangs
CLICK for More Info Online Mini-Tub Leaf-Spring Rear Suspension for 1964-70 Mustangs • Additional 2-3/4” tire clearance • Stronger offset frame rail inserts • Adjustable suspension geometry • Choose spring rate and ride height Mini-Tub Leaf-Spring Rear Suspension The mini-tub leaf-spring suspension from Total Control Products Applications allows substantially greater clearance for extremely large tire and wheel Mustang 64-70 combinations. Relocated shocks and springs combined with the additional mini-tub clearance allow 2-3/4” more tire clearance on each side of the vehicle. Systems include all mounts, offset frame rail inserts, leaf springs, spring plates and shock absorbers. A panhard bar version of the suspension is also offered for sharper and more predictable handling. Optional components include a narrow- width, adjustable-rate anti-roll bar and fabricated Ford 9” housing (FAB9™). Currently available for all styles of 1964-70 Mustangs. NOTE: ‘65-66 GT rear valance is not compatible with suspension. 1 Rear Spring Mounts Offset Frame Rail Insert Front Spring Mounts Relocated mount with 2-3/4” additional tire Welds inboard of OEM supporting crossmember clearance per side frame rail Panhard Bar System Upper Shock Mounts Lateral locating device Relocates stem-mount for rear end housing style shock inboard of OEM position Anti-Roll Bar FAB9 Rear End Houisng Splined arms with Fabricated Ford 9” adjustable end-link housing, structurally positions to alter rate superior to OEM 2 Mini-Tub Leaf-Spring Suspension Shown with optional Anti-Roll -

A Comparative Study of the Suspension for an Off-Road Vehicle
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 05 | May 2020 www.irjet.net p-ISSN: 2395-0072 A Comparative study of the Suspension for an Off-Road Vehicle Sivadanus.S Department of Manufacturing Engineering, College of Engineering – Guindy, Chennai ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - Humans use different vehicles to travel in is set nothing can be adjusted or moved. This type of different terrains for comfort and ease of travel. An off-terrain suspension will not be considered in the scope of this project vehicle is generally used for rugged terrain and needs a largely due to its lack of adjustability. completely different dynamics in suspension comparison to an on-road vehicle. The aim of this project is to identify and Independent suspension systems provide more effective determine the parameters of vehicle dynamics with a proper functionality in traction and stability for off-roading study of suspension and to initiate a comparative study for an applications. Independent suspension systems provide flex off-road vehicle using different models. (the ability for one wheel to move vertically while still Key Words: Suspension, Vehicle Dynamics, Off-road allowing the other wheels to stay in contact with the Vehicle, Control arms, Camber surface). 1.INTRODUCTION There are many different versions and variations of independent suspensions, which include swing axle Suspension suspensions, transverse leaf spring suspensions, trailing and The role of a suspension system within a vehicle is to ensure semi-trailing suspensions, Macpherson strut suspensions, that contact between the tires and driving surface is and double wishbone suspensions. Control arms are used for continuously maintained. -
Specifiers & Installers Guide to TORSION BAR APPLICATIONS
Specifiers & Installers Guide To TORSION BAR APPLICATIONS WELCOME Thank you for specifying Sauber Torsion Bars. By choosing us as your stability partner, you derive the following benefits: * Improved Stability * Stability is safety, and safety is our first concern. A Sauber Torsion Bar can eliminate unwanted counterweight, offering your users an extra safety margin. Because Sauber bars don't rigidize the chassis frame, they always provide a smooth, quiet ride. * Long Life * Premium bronze and galvanized components. Bushings guaranteed and replaced as/if needed for 10 years. 10 Year parts coverage when inspected at no greater than four month intervals. * Excellent Documentation * Our comprehensive applications charts, installation instructions and detailed drawings provide the vital information you and your installers need in an organized format. * Superior Support * Toll-free phone and fax service from anywhere in North America provides easy access to the resources of our organization through your personal company representative. * Lower Life Cycle Costs * Since it takes less time to mount our bar, its installed cost can actually be less than other alternatives. Sauber Torsion Bars are designed and built to last as long as your chassis. * Extensive Inventory * Our inventory power puts our bar on the floor just when you want it. Your production schedule can't wait on your suppliers, and with us as your partner, it won't. * More Choices * Underframe or overframe, nobody provides more installation options than we do. More choices mean a better -

Roadmaster, Experts in Dinghy Towing, Introduces the Comfort Ride Slipper Leaf Spring and Shock Absorber Systems to Road-Weary Trailer and Fifth-Wheel Owners
article and photos by Bob Livingston SUSPENSION NIRVANA Roadmaster, experts in dinghy towing, introduces the Comfort Ride Slipper Leaf Spring and Shock Absorber systems to road-weary trailer and fifth-wheel owners railers and fifth-wheels take a lot of punishment a company immersed in the tow-bar business, catering on the road. Suspensions, designed to counter this to owners towing vehicles behind their motorhomes, has Tabuse, have not changed much over the years, and expanded its offerings in the towable arena with the intro- in most cases are the same ones found on chassis that date duction of the Comfort Ride Slipper Leaf Spring Suspension back a very long time. (The old line “This isn’t your grand- and Shock Absorber systems. father’s vehicle” does not apply.) While stock suspensions The concept is simple, and the result is a game changer hold the chassis off the ground, controlling the ride is not in the way trailers and fifth-wheels handle all road conditions. a strong attribute. One might ask, “Why worry about ride quality inside Leaf springs tied to shackles and a center-mounted a trailer when towing since no one is back there to feel equalizer are supposed to counter the bumps in the road the shakes, rattles and rolls? That’s a valid question, but but, with few exceptions, are not very effective. Roadmaster, subjecting a trailer to a constant 4.0-magnitude earthquake 74 TRAILER LIFE July 2018 Roadmaster’s Comfort Ride Slipper Leaf Spring and Shock Absorber systems bolt on to the frame with only minor drilling needed to mount the center box. -

Ride Control Defined
RIDE CONTROL DEFINED According to Newton's First Law, a moving body will continue moving in a straight line until it is acted upon by another force. Newton's Second Law states that for each action there is an equal and opposite reaction. In the case of the automobile, whether the disturbing force is in the form of a wind-gust, an incline in the roadway, or the cornering forces produced by tires, the force causing the action and the force resisting the action will always be in balance. Many things affect vehicles in motion. Weight distribution, speed, road conditions and wind are some factors that affect how vehicles travel down the highway. Under all these variables however, the vehicle suspension system including the shocks, struts and springs must be in good condition. Worn suspension components may reduce the stability of the vehicle and reduce driver control. They may also accelerate wear on other suspension components. Replacing worn or inadequate shocks and struts will help maintain good ride control as they: Control spring and suspension movement Provide consistent handling and braking Prevent premature tire wear Help keep the tires in contact with the road Maintain dynamic wheel alignment Control vehicle bounce, roll, sway, dive and acceleration squat Reduce wear on other vehicle systems Promote even and balanced tire and brake wear Reduce driver fatigue Suspension concepts and components have changed and will continue to change dramatically, but the basic objective remains the same: 1. Provide steering stability with good handling characteristics 2. Maximize passenger comfort Achieving these objectives under all variables of a vehicle in motion is called ride control 1 BASIC TERMINOLOGY To begin this training program, you need to possess some very basic information. -

Rollover of Heavy Commercial Vehicles
Rollover of Heavy Commercial Vehicles - UMTRI-99- 19 August, 1999 C. B. Winkler R. D. Ervin The University of Michigan Transportation Research Institute 2901 Baxter Road, Ann Arbor, Michigan 48 109 for Volvo Truck Corporation, AB Goteborg, Sweden and the Great Lakes Center for Truck and Transit Research Ann Arbor, Michigan Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Reciplent's Catalog No. 4. Title and Subtitle 5. Report Date August, 1999 Rollover of Heavy Commercial Vehicles 6. Performing Organization Code 8. Performing Organlzatlon Report Nio. 7. Author@) Winkler, C. B.; Ervin, R.D. - 9. Performing Organlzation Name and Address 1 10. work unit NO. (TRAIS) The University of Michigan Transportation Research Institute 11. Contract or Grant NO. 2901 Baxter Road, Ann Arbor, MI 48109-2150 13. Type of Report and Perlod Coverejd - 12. Sponsoring Agency Name and Address Final Report Volvo Truck Corporation, 1B Great lakes Center for Truck and Transit Research 14. Sponsoring Agency Code I 15. Supplementary Notes 16. Abstract The state-of-the-art understanding of rollover of the commercial vehicle is reviewed. Accident statistics are presented which highlight the severity and lethal nature of rollover crashes. Physical and statistical evidlence for the linkage between vehicle roll stability and the actual occurrence of rollover accidents is presented. The fundamentals of static roll stability are described in detail and then enhanced with discussion of dynamilc considerations of the rollover process. The text concludes with a discussion of the evolving use of intelligent electronic systems and active vehicle control for reducing the occurrence of rollover. -

Transverse Leaf Springs: a Corvette Controversy
Transverse Leaf Springs: A Corvette Controversy By Matt Miller Introduction A lot of people give Corvettes flack because they employ leaf springs. The mere mention of leaf springs conjures up images of suspensions on horse-drawn buggies, old cars and trucks, and Harbor Freight utility trailers. Even magazine reviews of the latest Corvettes talk about how “antiquated” their leaf spring designs are, and many a Corvette enthusiast has converted his car to aftermarket coilovers in the belief that they are inherently better than the composite transverse leaf springs found on the front and rear suspensions of all Corvettes since 1984. But is that true? Does the Corvette’s use of transverse leaf springs mean it has an inferior, outdated suspension design? The short answer is “No!” To find out why, we’ll cover some basics on springs and suspensions and see how the facts add up. Page 1 What is a Spring, Anyway? We all intuitively know what springs are. But technically speaking, a spring is an elastic mechanical device that stores potential energy. When mechanical energy is put into a spring, it deforms and can release that energy back in the opposite direction. We measure a spring’s energy storage by its “spring rate,” which defines its energy storage. The spring rate defines the increase in force required to move the spring a certain amount. For example, if a spring has a rate of 100 lb/in (pounds per inch), it means that 100 lbs of force will move one end of it 1”, an additional 100 lbs will move it another inch, and so on. -

Truck Handling Stability Simulation and Comparison of Taper-Leaf and Multi-Leaf Spring Suspensions with the Same Vertical Stiffness
applied sciences Article Truck Handling Stability Simulation and Comparison of Taper-Leaf and Multi-Leaf Spring Suspensions with the Same Vertical Stiffness Leilei Zhao 1, Yunshan Zhang 2, Yuewei Yu 1,*, Changcheng Zhou 1,*, Xiaohan Li 1 and Hongyan Li 3 1 School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo 255000, China; [email protected] (L.Z.); [email protected] (X.L.) 2 Shandong Automobile Spring Factory Zibo Co.,Ltd., Zibo 255000, China; [email protected] 3 State Key Laboratory of Automotive Simulation and Control, Jilin University, Changchun 130022, China; [email protected] * Correspondence: [email protected] (Y.Y.); [email protected] (C.Z.); Tel.: +86-135-7338-7800 (C.Z.) Received: 16 December 2019; Accepted: 31 January 2020; Published: 14 February 2020 Abstract: The lightweight design of trucks is of great importance to enhance the load capacity and reduce the production cost. As a result, the taper-leaf spring will gradually replace the multi-leaf spring to become the main elastic element of the suspension for trucks. To reveal the changes of the handling stability after the replacement, the simulations and comparison of the taper-leaf and the multi-leaf spring suspensions with the same vertical stiffness for trucks were conducted. Firstly, to ensure the same comfort of the truck before and after the replacement, an analytical method of replacing the multi-leaf spring with the taper-leaf spring was proposed. Secondly, the effectiveness of the method was verified by the stiffness tests based on a case study. Thirdly, the dynamic models of the taper-leaf spring and the multi-leaf spring with the same vertical stiffness are established and validated, respectively. -

L1262 Rev B 01-20 © 2016 – 2019 Hendrickson USA, L.L.C
THE EVOLUTION OF TRAILER SUSPENSION DAMPING: A GUIDE TO BEST PRACTICES The noticeable ride benefits of suspension damping devices also bring maintenance challenges for fleets. Educate yourself on the evolution of damping methods to better manage long-term costs. All vehicles, passenger or commercial, are designed with damping in mind when it comes to the suspension. The primary goal of a suspension system is to carry the load from the vehicle while providing compliance between the sprung mass (chassis, trailer body, etc.) and the unsprung mass (the suspension, tires, wheels, brakes, etc). Damping devices, such as shock absorbers, are designed to add comfort and control by resisting the motion of the suspension. Without damping forces, a vehicle would have a tendency to bounce at its natural, or resonant, frequency. But over the service life of the vehicle, most suspension damping devices result in a compromise of either ride quality or added component maintenance. In the commercial trailer industry, managing issues like driver comfort, cargo protection, vehicle safety and government compliance can be a complicated balancing act. Understanding the fundamentals of damping enables fleets to better manage long-term maintenance and operation costs while keeping ride quality and driver satisfaction high. What Is Damping and Why Do I Need It? Damping describes the process of absorbing energy of road inputs that are transmitted through the suspension system. Suspension damping reduces the number and intensity of these inputs to the vehicle thereby helping to prolong the life of the vehicle and its components. In turn, this helps reduce overall operating and maintenance costs. -

Leaf Spring Replacement on an Existing Axle Beam Ti-345 Axles and Suspension
LEAF SPRING REPLACEMENT ON AN EXISTING AXLE BEAM TI-345 AXLES AND SUSPENSION Purpose This document outlines the process for replacing the double-eye leaf spring components on an existing axle beam assembly. The following procedure is applicable for both underslung—when the leaf spring is mounted, or "slung", under the axle—and overslung—when the leaf spring is mounted, or "slung", over the axle (Fig. 1). Fig. 1 Underslung Overslung NOTE: Images used in this document are for reference only when assembling, installing and/or operating this product. Actual appearance of provided and/or purchased parts and assemblies may differ. Safety Read and understand all instructions before installing or operating this product. Adhere to all safety labels. The trailer MUST be supported per manufacturer's recommendations before working underneath. Failure to do so may result in death, serious personal injury, severe product and/or property damage. Always lift the trailer by its frame and never by its axle or suspension. Axle and suspension components are not designed, or rated, for the dead weight, point-of-contact loads that the trailer's frame is. Do not go under the railer unless it is supported by appropriately rated jack stands. Improperly supported trailers can collapse, causing possible serious personal injury or death. Moving parts can pinch, cut or crush. Keep clear and use caution. Wear appropriate personal protective equipment (PPE) when performing service or maintenance operations. Always wear eye protection when servicing trailer axles, brakes, hubs, springs and wheels. Not using PPE may result in personal injury. Rev: 12.09.19 Page 1 CCD-0003592 LEAF SPRING REPLACEMENT ON AN EXISTING AXLE BEAM TI-345 AXLES AND SUSPENSION Resources Required • 1 - 2 persons, depending on task • Assorted deep well sockets • Floor jacks • Hammer or mallet • Jack stands • Torque wrench (ft-lb) • Pneumatic air or impact gun Replacement Procedure 1.