Rollover of Heavy Commercial Vehicles
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Sp057 Leaf Spring Installation
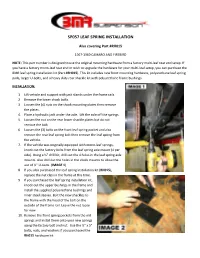
SP057 LEAF SPRING INSTALLATION Also covering Part #RH015 1967-1969 CAMARO AND FIREBIRD NOTE: This part number is designed to use the original mounting hardware from a factory multi-leaf rear end setup. If you have a factory mono-leaf rear end or wish to upgrade the hardware for your multi-leaf setup, you can purchase the BMR leaf spring installation kit (Part #RH015). This kit includes new front mounting hardware, polyurethane leaf spring pads, larger U-bolts, and a heavy duty rear shackle kit with polyurethane frame bushings. INSTALLATION: 1. Lift vehicle and support with jack stands under the frame rails. 2. Remove the lower shock bolts. 3. Loosen the (4) nuts on the shock mounting plates then remove the plates. 4. Place a hydraulic jack under the axle. Lift the axle off the springs. 5. Loosen the nut on the rear lower shackle plates but do not remove the bolt. 6. Loosen the (3) bolts on the front leaf spring pocket and also remove the rear leaf spring bolt then remove the leaf spring from the vehicle. 7. If the vehicle was originally equipped with mono-leaf springs, knock out the factory bolts from the leaf spring axle mount (4 per side). Using a ½” drill bit, drill out the 4 holes in the leaf spring axle mounts. Also drill out the holes in the shock mounts to allow the use of ½” U-bolts. (IMAGE 1) 8. If you also purchased the leaf spring installation kit (RH015), replace the nut clips in the frame at this time. 9. If you purchased the leaf spring installation kit, knock out the upper bushings in the frame and install the supplied polyurethane bushings and inner steel sleeves. -

Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle Using Adams /C Ar
ADAPTION AND EVALUATION OF TRANSVERSAL LEAF SPRING SUSPENSION DESIGN FOR A LIGHTWEIGHT VEHICLE USING ADAMS /C AR FLORIAN CHRIST Master Thesis in Vehicle Engineering Vehicle Dynamics Aeronautical and Vehicle Engineering Royal Institute of Technology TRITA-AVE 2015:09 ISSN 1651-7660 Adaption and Evaluation of Transversal Leaf Spring Suspension Design for a Lightweight Vehicle using Adams/Car FLORIAN CHRIST © Florian Christ, 2015. Vehicle Dynamics Department of Aeronautical and Vehicle Engineering Kungliga Tekniska Högskolan SE-100 44 Stockholm Sweden ii Abstract This investigation deals with the suspension of a lightweight medium-class vehicle for four passengers with a curb weight of 1000 kg. The suspension layout consists of a transversal leaf spring and is supported by an active air spring which is included in the damper. The lower control arms are replaced by the leaf spring ends. Active ride height control is introduced to compensate for different vehicle load states. Active steering is applied using electric linear actuators with steer-by wire design. Besides intense use of light material the inquiry should investigate whether elimination of suspension parts or a lighter component is concordant with the stability demands of the vehicle. The investigation is based on simulations obtained with MSC Software ADAMS/Car and Matlab. The suspension is modeled in Adams/Car and has to proof it's compliance in normal driving conditions and under extreme forces. Evaluation criteria are suspension kinematics and compliance such as camber, caster and toe change during wheel travel in different load states. Also the leaf spring deflection, anti-dive and anti-squat measures and brake force distribution are investigated. -

Mini-Tub Leaf-Spring Rear Suspension for 1964-70 Mustangs
CLICK for More Info Online Mini-Tub Leaf-Spring Rear Suspension for 1964-70 Mustangs • Additional 2-3/4” tire clearance • Stronger offset frame rail inserts • Adjustable suspension geometry • Choose spring rate and ride height Mini-Tub Leaf-Spring Rear Suspension The mini-tub leaf-spring suspension from Total Control Products Applications allows substantially greater clearance for extremely large tire and wheel Mustang 64-70 combinations. Relocated shocks and springs combined with the additional mini-tub clearance allow 2-3/4” more tire clearance on each side of the vehicle. Systems include all mounts, offset frame rail inserts, leaf springs, spring plates and shock absorbers. A panhard bar version of the suspension is also offered for sharper and more predictable handling. Optional components include a narrow- width, adjustable-rate anti-roll bar and fabricated Ford 9” housing (FAB9™). Currently available for all styles of 1964-70 Mustangs. NOTE: ‘65-66 GT rear valance is not compatible with suspension. 1 Rear Spring Mounts Offset Frame Rail Insert Front Spring Mounts Relocated mount with 2-3/4” additional tire Welds inboard of OEM supporting crossmember clearance per side frame rail Panhard Bar System Upper Shock Mounts Lateral locating device Relocates stem-mount for rear end housing style shock inboard of OEM position Anti-Roll Bar FAB9 Rear End Houisng Splined arms with Fabricated Ford 9” adjustable end-link housing, structurally positions to alter rate superior to OEM 2 Mini-Tub Leaf-Spring Suspension Shown with optional Anti-Roll -

State of Louisiana Shall Remain Valid for Sixty (60) Days After Discharge, Provided the License Was Valid (Not Expired, Suspended Or Revoked) Upon Entrance to Service
Class D & E Driver’s Guide LOUISIANA OFFICE OF MOTOR VEHICLES DPSMV2052 (R042013) Message from the Commissioner “Welcome to driving in Louisiana.” I am pleased to present the Louisiana Driver’s Guide to our new and current drivers. This guide is designed to provide you with the rules of the road, knowledge to assist you in making better driving decisions, and valuable information on safety and sharing the road with others. It is incumbent upon you, the driver, to respect all traffic laws and other drivers as well. Driving is a vital part of life. It provides you with a means of attaining the necessities of daily living as well as providing you with the added convenience to move about at leisure. The driving experience, however, is a privilege and comes with great responsibilities. Please strive to become a safe and dependable driver to ensure that this privilege is not lost. Driving, the same as life, is a constant learning experience. The information contained in this guide, along with your experience and responsive actions while driving, will assist in protecting you, your family, and other drivers. This guide is not intended to be an official legal reference to the Louisiana traffic laws. It only highlights those laws, driving practices and procedures that you will use most often. It should be noted that the material in this guide is subject to change to comply with amended State and Federal legislations. Remember to buckle up. Safety belts save lives. Let’s work together to make Louisiana a safer place for all. Stephen F. -

TABLE of CONTENTS 1 Before Driving 2 When Driving 3 Interior
TABLE OF CONTENTS Adjusting and operating features such as door locks, mir- 1 Before driving rors, and steering column. 2 When driving Driving, stopping and safe-driving information. Air conditioning and audio systems, as well as other interior 3 Interior features features for a comfortable driving experience. 4 Maintenance Cleaning and protecting your vehicle, performing do-it-your- and care self maintenance, and maintenance information. 5 When trouble What to do if the vehicle needs to be towed, gets a flat tire, arises or is involved in an accident. 6 Vehicle specifications Detailed vehicle information. Reporting safety defects for US owners and seat belt in- 7 For owners structions for Canadian owners. Index Alphabetical listing of information contained in this manual. 1 TABLE OF CONTENTS Index 1-6. Theft deterrent system 1 Before driving Engine immobilizer system......... 70 Alarm.................................................... 72 1-1. Key information Theft prevention labels Keys ...................................................... 22 (U.S.A.)............................................. 74 1-2. Opening, closing and locking the 1-7. Safety information doors Correct driving posture............... 75 Wireless remote control.............. 24 SRS airbags ....................................... 77 Side doors .......................................... 26 Front passenger occupant classification system.................... 90 Back door............................................ 31 Child restraint systems ................. 95 1-3. Adjustable -

Supercross Amateur Racing
Supercross Amateur Racing AMATEUR CLASS DESIGNATIONS Class Name Age Displacement Specifications 51cc Limited 4 - 8 0cc-51cc 2-stroke or 4-stroke 51cc Limited 4 - 6 and 51cc Limited 4 – 8 age range minicycles are both approved in this class 51cc Limited 4 - 6 0cc-51cc 2-stroke or 4-stroke Single-speed automatic. Maximum (adjusted length) wheelbase 36 inches. Maximum wheel size 10 inches. Maximum seat height 24 inches. No larger than 14 mm round intake. 51cc Limited 7 - 8 0cc-51cc 2-stroke or 4-stroke Single-speed automatic. Maximum (adjusted length) wheelbase 41 inches. Maximum wheel size 12 inches. Retrofitted 12-inch wheels are permitted on all class 2 minicycles. OEMs part must be used. No larger than 19mm round intake. Ultracross 50’s 4-8 0-51cc 2-stroke or 51cc Limited 4 - 6 and 51cc Limited 4 – 8 age range 4-stroke minicycles are both approved in this class 65cc 7 - 11 59cc-65cc 2-stroke Minimum wheel size 12 inches. Maximum front wheel 14 inches. Maximum (adjusted length) wheelbase 45 inches. Maximum wheelbase must maintain manufacturer specifications. 65cc 7 - 9 59cc-65cc 2-stroke Minimum wheel size 12 inches. Maximum front wheel 14 inches. Maximum (adjusted length) wheelbase 45 inches. Maximum wheelbase must maintain manufacturer specifications. 65cc 10 - 11 59cc-65cc 2-stroke Minimum wheel size 12 inches. Maximum front wheel 14 inches. Maximum (adjusted length) wheelbase 45 inches. Maximum wheelbase must maintain manufacturer specifications. 85cc 9 - 12 79cc-85cc 2-stroke Maximum front wheel 17” Minimum rear wheel 12” Maximum rear wheel 16” Maximum wheel base 51” Mini Senior 12 - 15 79cc-85cc 2-stroke or 75-150cc 4-stroke Maximum front wheel17” Minimum rear wheel 12” Maximum rear wheel 16” Maximum wheel base 51” Supermini 1 9 - 15 79cc-112cc 2-stroke or 75cc-150cc 4-stroke Maximum front wheel 19” Maximum rear wheel 16” Maximum wheel base 52” *Competitors 9 thru 11 yrs of age are only allowed to use a 79cc - 85cc 2-stroke minicycle if competing in this class. -

Types of Divisible Load Overweight Permits – Perm 69 (07/09)
State of New York Department of Transportation Central Permit Office Types of Divisible Load Overweight Permits – Perm 69 (07/09) Statewide Permit Types Type 1 (F1) Max. Axle and Grouping Weights in Lbs. Fee $360.00 Steering axle 22,400 Min. Axles 3 Any other Single axle 25,000 Max. Axles 4 Tandem Group 47,000 Min. Wheelbase 16 Feet Tridem Group 57,000 Max. Gross Vehicle Weight 97,400 Lbs. Max. Trailer Length 48 Feet Permitted Gross weight is based on the F1 formula : (1,250 x Wheelbase* ) + 42,500 * Overall Wheelbase in inches is rounded to the nearest whole foot. Type 1A (F1) - This permit type is Large Through Truck Restricted. Max. Axle and Grouping Weights in Lbs. Fee $750.00 (5 or 6 axles) Steering axle 22,400 $900.00 (7 or more axles) Any other Single axle 25,000 Min. Axles 5 Tandem Group 47,000 Min. Wheelbase 16 Feet Tridem Group 57,000 Max. Gross Vehicle Weight 102,000 Lbs. Quad 62,000 Max. Trailer Length 48 Feet Permitted Gross weight is based on the F1 formula : (1,250 x Wheelbase* ) + 42,500 * Overall Wheelbase in inches is rounded to the nearest whole foot. Type 7 (F2) - This permit type is Large Through Truck Restricted. Max. Axle and Grouping Weights in Lbs. Fee $750.00 (6 axles) Steering axle 22,400 $900.00 (7 or more axles) Any other Single axle 25,000 Min. Axles 6 Tandem Group 48,000 Min. Wheelbase 36 ½ feet Tridem Group 58,000 Max. Gross Vehicle Weight 107,000 Lbs. -

Bendix ABS-6 Advanced with ESP Stability System
Bendix® ABS-6 Advanced with ESP® Stability System Frequently Asked Questions to Help You Make an Intelligent Investment in Stability Contents: Key FAQs (Start here!)………….. Pg. 2 Stability Definitions …………….. Pg. 6 System Comparison ……………. Pg. 7 Function/Performance ………….. Pg. 9 Value ………………………………. Pg. 12 Availability/Applications ……….. Pg. 14 Vehicle System Integration …….. Pg. 16 Safety ………………………………. Pg. 17 Take the Next Step ………………. Pg. 18 Please note: This document is designed to assist you in the stability system decision process, not to serve as a performance guarantee. No system will prevent 100% of the incidents you may experience. This information is subject to change without notice © 2007 Bendix Commercial Vehicle Systems LLC, a member of the Knorr-Bremse Group. All Rights Reserved. 03/07 1 Key FAQs What is roll stability? Roll stability counteracts the tendency of a vehicle, or vehicle combination, to tip over while changing direction (typically while turning). The lateral (side) acceleration creates a force at the center of gravity (CG), “pushing” the truck/tractor-trailer horizontally. The friction between the tires and the road opposes that force. If the lateral force is high enough, one side of the vehicle may begin to lift off the ground potentially causing the vehicle to roll over. Factors influencing the sensitivity of a vehicle to lateral forces include: the load CG height, load offset, road adhesion, suspension stiffness, frame stiffness and track width of vehicle. What is yaw stability? Yaw stability counteracts the tendency of a vehicle to spin about its vertical axis. During operation, if the friction between the road surface and the tractor’s tires is not sufficient to oppose lateral (side) forces, one or more of the tires can slide, causing the truck/tractor to spin. -

2021 Ram 1500 Classic
SEDANS MINIVANS/CROSSOVERS SPORT UTILITY TRUCKS/COMMERCIAL LAW ENFORCEMENT 2021 RAM 1500 CLASSIC SELECT STANDARD FEATURES 3.6L Pentastar® V6 / 850RE 8-speed Automatic Air Conditioning — Manual Alternator — 160-amp Axle — 3.21 ratio Battery — 730-amp Cluster — Instrument, with 3.5-inch display screen for Driver Information Display Fuel Tank — 26-gallon Headlamps — Automatic quad-lens halogen with incandescent taillamps Mirrors — 6 x 9-inch Seats — 40/20/40 split-bench front seat with folding front armrest/cup holder, floor-mounted storage tray on Crew Cab (Quad Cab® and Crew Cab models include folding rear bench seat) Shock Absorbers — Heavy-duty, front and rear Spare Tire — Full-size Stabilizer Bar — Front and rear Steering — Electronic, rack and pinion Storage — Front, behind the seats (Regular Cab only) Properly secure all cargo. — Rear, in-floor bins, two with removable liners (Crew Cab only) — Rear, underseat compartment (Quad Cab and Crew Cab models only) Styled Steel Wheels — 17 x 7-inch Suspension — Front, upper and lower A-arms, coil springs, twin-tube shocks — Rear, five-link, coil springs, twin-tube shocks Tires — P265 / 70R17 BSW A/S Transfer Case — Electronic part-time (4x4 models only) Windows — Manual (Regular Cab only) — Power, front and rear with driver’s one-touch up/down (Quad Cab and Crew Cab models only) SAFETY & SECURITY Air Bags(2) — Advanced multistage front — Supplemental side-curtain — Supplemental front-seat side-mounted Brakes — Power-assisted four-wheel antilock disc Electronic Stability Control(3) — Includes Four-wheel Antilock Brake System, Brake Assist, All-Speed Traction Control, Rain Brake Support, Ready Alert Braking, Electronic Roll Mitigation, Hill Start Assist and Trailer Sway Damping(3) ParkView® Rear Back-Up Camera(22) ENGINES HORSEPOWER(17) TORQUE(17) Properly secure all cargo. -

Trends in the Static Stability Factor of Passenger Cars, Light Trucks, and Vans
DOT HS 809 868 June 2005 NHTSA Technical Report Trends in the Static Stability Factor of Passenger Cars, Light Trucks, and Vans This document is available to the public from the National Technical Information Service, Springfield, Virginia 22161 The United States Government does not endorse products or manufacturers. Trade or manufacturers’ names appear only because they are considered essential to the object of this report. Technical Report Documentation Page 1. Report No. 2. Government Accession No. 3. Recipient’s Catalog No. DOT HS 809 868 4. Title and Subtitle 5. Report Date June 2005 Trends in the Static Stability Factor of Passenger Cars, Light Trucks, and Vans 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Marie C. Walz 9. Performing Organization Name and Address 10. Work Unit No. (TRAIS) Office of Regulatory Analysis and Evaluation Planning, Evaluation and Budget 11. Contract or Grant No. National Highway Traffic Safety Administration Washington, DC 20590 12. Sponsoring Agency Name and Address 13. Type of Report and Period Covered Department of Transportation NHTSA Technical Report National Highway Traffic Safety Administration 14. Sponsoring Agency Code Washington, DC 20590 15. Supplementary Notes 16. Abstract Rollover crashes kill more than 10,000 occupants of passenger vehicles each year. As part of its mission to reduce fatalities and injuries, since model year 2001 NHTSA has included rollover information as part of its NCAP ratings. One of the primary means of assessing rollover risk is the static stability factor (SSF), a measurement of a vehicle’s resistance to rollover. The higher the SSF, the lower the rollover risk. -

A Comparative Study of the Suspension for an Off-Road Vehicle
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 07 Issue: 05 | May 2020 www.irjet.net p-ISSN: 2395-0072 A Comparative study of the Suspension for an Off-Road Vehicle Sivadanus.S Department of Manufacturing Engineering, College of Engineering – Guindy, Chennai ---------------------------------------------------------------------***--------------------------------------------------------------------- Abstract - Humans use different vehicles to travel in is set nothing can be adjusted or moved. This type of different terrains for comfort and ease of travel. An off-terrain suspension will not be considered in the scope of this project vehicle is generally used for rugged terrain and needs a largely due to its lack of adjustability. completely different dynamics in suspension comparison to an on-road vehicle. The aim of this project is to identify and Independent suspension systems provide more effective determine the parameters of vehicle dynamics with a proper functionality in traction and stability for off-roading study of suspension and to initiate a comparative study for an applications. Independent suspension systems provide flex off-road vehicle using different models. (the ability for one wheel to move vertically while still Key Words: Suspension, Vehicle Dynamics, Off-road allowing the other wheels to stay in contact with the Vehicle, Control arms, Camber surface). 1.INTRODUCTION There are many different versions and variations of independent suspensions, which include swing axle Suspension suspensions, transverse leaf spring suspensions, trailing and The role of a suspension system within a vehicle is to ensure semi-trailing suspensions, Macpherson strut suspensions, that contact between the tires and driving surface is and double wishbone suspensions. Control arms are used for continuously maintained. -
Specifiers & Installers Guide to TORSION BAR APPLICATIONS
Specifiers & Installers Guide To TORSION BAR APPLICATIONS WELCOME Thank you for specifying Sauber Torsion Bars. By choosing us as your stability partner, you derive the following benefits: * Improved Stability * Stability is safety, and safety is our first concern. A Sauber Torsion Bar can eliminate unwanted counterweight, offering your users an extra safety margin. Because Sauber bars don't rigidize the chassis frame, they always provide a smooth, quiet ride. * Long Life * Premium bronze and galvanized components. Bushings guaranteed and replaced as/if needed for 10 years. 10 Year parts coverage when inspected at no greater than four month intervals. * Excellent Documentation * Our comprehensive applications charts, installation instructions and detailed drawings provide the vital information you and your installers need in an organized format. * Superior Support * Toll-free phone and fax service from anywhere in North America provides easy access to the resources of our organization through your personal company representative. * Lower Life Cycle Costs * Since it takes less time to mount our bar, its installed cost can actually be less than other alternatives. Sauber Torsion Bars are designed and built to last as long as your chassis. * Extensive Inventory * Our inventory power puts our bar on the floor just when you want it. Your production schedule can't wait on your suppliers, and with us as your partner, it won't. * More Choices * Underframe or overframe, nobody provides more installation options than we do. More choices mean a better