CODING for Transmission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shahabi-Adib-Masc-ECE-August
A New Line Code for a Digital Communication System by Adib Shahabi Submitted in partial fulfilment of the requirements for the degree of Master of Applied Science at Dalhousie University Halifax, Nova Scotia August 2019 © Copyright by Adib Shahabi, 2019 To my wife Shahideh ii TABLE OF CONTENTS LIST OF TABLES ............................................................................................................ v LIST OF FIGURES .......................................................................................................... vi ABSTRACT ....................................................................................................................viii LIST OF ABBREVIATIONS USED ............................................................................... ix ACKNOWLEDGEMENTS ............................................................................................... x CHAPTER 1 INTRODUCTION ....................................................................................... 1 1.1 BACKGROUND ........................................................................................... 1 1.2 THESIS SYNOPSIS ...................................................................................... 4 1.3 ORGANIZATION OF THE THESIS ............................................................ 5 CHAPTER 2 MODELLING THE LINE CHANNEL ....................................................... 7 2.1 CABLE MODELLING .................................................................................. 7 2.2 TRANSFORMER COUPLING .................................................................. -

Criteria for Choosing Line Codes in Data Communication
ISTANBUL UNIVERSITY – YEAR : 2003 (843-857) JOURNAL OF ELECTRICAL & ELECTRONICS ENGINEERING VOLUME : 3 NUMBER : 2 CRITERIA FOR CHOOSING LINE CODES IN DATA COMMUNICATION Demir Öner Istanbul University, Engineering Faculty, Electrical and Electronics Engineering Department Avcılar, 34850, İstanbul, Turkey E-mail: [email protected] ABSTRACT In this paper, line codes used in data communication are investigated. The need for the line codes is emphasized, classification of line codes is presented, coding techniques of widely used line codes are explained with their advantages and disadvantages and criteria for chosing a line code are given. Keywords: Line codes, correlative coding, criteria for chosing line codes.. coding is either performed just before the 1. INTRODUCTION modulation or it is combined with the modulation process. The place of line coding in High-voltage-high-power pulse current The transmission systems is shown in Figure 1. purpose of applying line coding to digital signals before transmission is to reduce the undesirable The line coder at the transmitter and the effects of transmission medium such as noise, corresponding decoder at the receiver must attenuation, distortion and interference and to operate at the transmitted symbol rate. For this ensure reliable transmission by putting the signal reason, epecially for high-speed systems, a into a form that is suitable for the properties of reasonably simple design is usually essential. the transmission medium. For example, a sampled and quantized signal is not in a suitable form for transmission. Such a signal can be put 2. ISSUES TO BE CONSIDERED IN into a more suitable form by coding the LINE CODING quantized samples. -
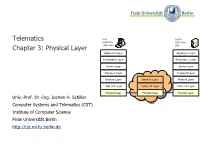
Telematics Chapter 3: Physical Layer
Telematics User Server watching with video Chapter 3: Physical Layer video clip clips Application Layer Application Layer Presentation Layer Presentation Layer Session Layer Session Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Data Link Layer Data Link Layer Data Link Layer Physical Layer Physical Layer Physical Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller Computer Systems and Telematics (CST) Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de Contents ● Design Issues ● Theoretical Basis for Data Communication ● Analog Data and Digital Signals ● Data Encoding ● Transmission Media ● Guided Transmission Media ● Wireless Transmission (see Mobile Communications) ● The Last Mile Problem ● Multiplexing ● Integrated Services Digital Network (ISDN) ● Digital Subscriber Line (DSL) ● Mobile Telephone System Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.2 Design Issues Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.3 Design Issues ● Connection parameters ● mechanical OSI Reference Model ● electric and electronic Application Layer ● functional and procedural Presentation Layer ● More detailed ● Physical transmission medium (copper cable, Session Layer optical fiber, radio, ...) ● Pin usage in network connectors Transport Layer ● Representation of raw bits (code, voltage,…) Network Layer ● Data rate ● Control of bit flow: Data Link Layer ● serial or parallel transmission of bits Physical Layer ● synchronous or asynchronous transmission ● simplex, half-duplex, or full-duplex transmission mode Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.4 Design Issues Transmitter Receiver Source Transmission System Destination NIC NIC Input Abcdef djasdja dak jd ashda kshd akjsd asdkjhasjd as kdjh askjda Univ.-Prof. -
One Twisted Pair Cable Or Equivalent) Capable of Transporting Analog Signals in the Frequency Range Ofapproximately 300 to 3000 Hertz (Voiceband)
APPENDIX UNE-SBCI3STATE PAGE 21 OF 51 SBC-13STATE/SPRINT COMMUNICATIONS COMPANY, L.P. 110802 8 .3 SBC-12STATE will offer the following subloop types: 8.3.1 2-Wire Analog Subloop provides a 2-wire (one twisted pair cable or equivalent) capable of transporting analog signals in the frequency range ofapproximately 300 to 3000 hertz (voiceband). 8.3.2 4-Wire Analog Subloop provides a 4-wire (two twisted pair cables or equivalent, with separate transmit and receive paths) capable of transporting analog signals in the frequency range of approximately 300 to 3000 hertz (voiceband). 8.3.3 4-Wire DS 1 Subloop provides a transmission path capable of supporting a 1 .544 Mbps service that utilizes AMI or B8ZS line code modulation. 8.3.4 DS3 Subloop provides DS3 service from the central office MDF to an Interconnection Panel at the RT. The loop facility used to transport the DS3 signal will be a fiber optical facility. 8 .3 .5 2-Wire / 4-Wire Analog DSL Capable Subloop that supports an analog signal based DSL technology (such as ADSL). It will have twisted copper cable that may be loaded, have more than 2,500 feet of bridged tap, and may contain repeaters. 8 .3.6 2-Wire / 4-Wire Digital DSL Capable Subloop that supports a digital signal based DSL technology (such as HDSL or IDSL). It will have twisted copper cable that may be loaded, have more than 2,500 feet of bridged tap, and may contain repeaters. 8.3 .7 ISDN Subloop is a 2-Wire digital offering which provides a transmission path capable of supporting a 160 Kbps, Basic Rate ISDN (BRI) service that utilizes 2BIQ line code modulation with end user capacity up to 144 Kbps . -

An Efficient Utilization of Power Spectrum Density for Smart Cities
sensors Article Moving towards IoT Based Digital Communication: An Efficient Utilization of Power Spectrum Density for Smart Cities Tariq Ali 1,*, Abdullah S. Alwadie 1, Abdul Rasheed Rizwan 2, Ahthasham Sajid 3 , Muhammad Irfan 1 and Muhammad Awais 4 1 Electrical Engineering Department, College of Engineering, Najran University, Najran 61441, Saudi Arabia; [email protected] (A.S.A.); [email protected] (M.I.) 2 Department of Computer Science, Punjab Education System, Depaalpur 56180, Pakistan; [email protected] 3 Department of Computer Science, Faculty of ICT, Balochistan University of Information Technology Engineering and Management Sciences, Quetta 87300, Pakistan; [email protected] 4 School of Computing and Communications, Lancaster University, Bailrigg, Lancaster LA1 4YW, UK; [email protected] * Correspondence: [email protected] Received: 8 April 2020; Accepted: 14 May 2020; Published: 18 May 2020 Abstract: The future of the Internet of Things (IoT) is interlinked with digital communication in smart cities. The digital signal power spectrum of smart IoT devices is greatly needed to provide communication support. The line codes play a significant role in data bit transmission in digital communication. The existing line-coding techniques are designed for traditional computing network technology and power spectrum density to translate data bits into a signal using various line code waveforms. The existing line-code techniques have multiple kinds of issues, such as the utilization of bandwidth, connection synchronization (CS), the direct current (DC) component, and power spectrum density (PSD). These highlighted issues are not adequate in IoT devices in smart cities due to their small size. -

Multilevel Sequences and Line Codes
COPYRIGHT AND CITATION CONSIDERATIONS FOR THIS THESIS/ DISSERTATION o Attribution — You must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. o NonCommercial — You may not use the material for commercial purposes. o ShareAlike — If you remix, transform, or build upon the material, you must distribute your contributions under the same license as the original. How to cite this thesis Surname, Initial(s). (2012) Title of the thesis or dissertation. PhD. (Chemistry)/ M.Sc. (Physics)/ M.A. (Philosophy)/M.Com. (Finance) etc. [Unpublished]: University of Johannesburg. Retrieved from: https://ujdigispace.uj.ac.za (Accessed: Date). MULTILEVEL SEQUENCES AND LINE CODES by LOUIS BOTHA Thesis submitted as partial fulfilment of the requirements for the degree MASTER OF ENGINEERING in ELECTRICAL AND ELECTRONIC ENGINEERING in the FACULTY OF ENGINEERING at the RAND AFRIKAANS UNIVERSITY SUPERVISOR: PROF HC FERREIRA MAY 1991 SUMMARY As the demand for high-speed data communications over conventional channels such as coaxial cables and twisted pairs grows, it becomes neccesary to optimize every aspect of the communication system at reasonable cost to meet this demand effectively. The choice of a line code is one of the most important aspects in the design of a communications system, as the line code determines the complexity, and thus also the cost, of several circuits in the system. It has become known in recent years that a multilevel line code is preferable to a binary code in cases where high-speed communications are desired. -

Università Degli Studi Di Parma Architectural
UNIVERSITÀ DEGLI STUDI DI PARMA DIPARTIMENTO DI INGEGNERIA DELL’INFORMAZIONE PARMA (I) - VIALE DELLE SCIENZE TEL. 0521-905800 • FAX 0521-905758 Dottorato di Ricerca in Tecnologie dell’Informazione XIX Ciclo Giulia Papotti ARCHITECTURAL STUDIES OF A RADIATION-HARD TRANSCEIVER ASIC IN 0.13 um CMOS FOR DIGITAL OPTICAL LINKS IN HIGH ENERGY PHYSICS APPLICATIONS DISSERTAZIONE PRESENTATA PER IL CONSEGUIMENTO DEL TITOLO DI DOTTORE DI RICERCA GENNAIO 2007 CERN-THESIS-2007-111 //2007 εστω δε ο λογος υμων ναι ναι ου ου το δε περισσον τουτων εκ του πονηρου εστιν (Simply let your 'Yes' be 'Yes,' and your 'No,' 'No'; anything beyond this comes from the evil one.) (Matthew, 5:37) Acknowledgements I have always been concise, so all you get is a list. Here it goes… Paulo and Sandro for useful comments, critiques, discussions, explanations, feedback, questions, support… Apart from helping out in the completion of the PhD thesis in particular and PhD program in general, they have been role models who helped me in my personal professional growth. At my University in Parma, Prof. Ciampolini for being there every time I needed him, despite the amount of other engagements. I will not forget that he was the one who suggested CERN to me in the first place. Mike and all the Microelectronics group at CERN, for being such a stimulating working environment. In particular Bert, Ernest, Federico, Francois, Giovanni e Giovanni, Guido, Hugo, Kostas, Matthieu, and Rafael. Winnie needs to be specially thanked among them for reading and patiently correcting most of this thesis. Francois, Jan and Karl cannot be forgotten either, for having initiated me to CERN and the world of experimental measurements. -
ETRI PHY Proposal on VLC Line Code for Illumination
September 2009 doc.: IEEE 802.15-09-0675-00-0007 Project: IEEE P802.15 Working Group for Wireless Personal Area Networks (WPANs) Submission Title: [ETRI PHY Proposal on VLC Line Code for Illumination] Date Submitted: [23 September, 2009] Source: [Dae Ho Kim, Tae-Gyu Kang, Sang-Kyu Lim, Ill Soon Jang, Dong Won Han] Company [ETRI] Address [138 Gajeongno, Yuseong-gu, Daejeon, 305-700] Voice:[+82-42-860-5648], FAX: [+82-42-860-5218], E-Mail:[[email protected]] Re: [Response to call for proposals] Abstract: [This document describes a proposal of PHY line code for LED illumination ] Purpose: [Proposal to IEEE 802.15.7 VLC TG]] Notice: This document has been prepared to assist the IEEE P802.15. It is offered as a basis for discussion and is not binding on the contributing individual(s) or organization(s). The material in this document is subject to change in form and content after further study. The contributor(s) reserve(s) the right to add, amend or withdraw material contained herein. Release: The contributor acknowledges and accepts that this contribution becomes the property of IEEE and may be made publicly available by P802.15. TG VLC Submission Slide 1 Dae-Ho Kim, ETRI September 2009 doc.: IEEE 802.15-09-0675-00-0007 ETRI PHY Proposal on VLC Line code for Illumination Dae Ho Kim [email protected] ETRI TG VLC Submission Slide 2 Dae-Ho Kim, ETRI September 2009 doc.: IEEE 802.15-09-0675-00-0007 Contents • ETRI PHY Considerations and Scope • Summary of ETRI PHY Proposal • Flickering issue at LED illumination • Proposed Line Code – Modified-4B5B -

Episode 3.11 – Polar and Bipolar Line Coding
Episode 3.11 – Polar and Bipolar Line Coding Welcome to the Geek Author series on Computer Organization and Design Fundamentals. I’m David Tarnoff, and in this series we are working our way through the topics of Computer Organization, Computer Architecture, Digital Design, and Embedded System Design. If you’re interested in the inner workings of a computer, then you’re in the right place. The only background you’ll need for this series is an understanding of integer math, and if possible, a little experience with a programming language such as Java. And one more thing. Our topics involve a bit of figuring, so it might help to keep a pencil and paper handy. In Episode 3.10, we looked at the electrical connection between two digital devices and saw two ways we could use a positive voltage and a zero voltage level to code the logic zeros and logic ones of our data. This unipolar scheme had a disadvantage. The capacitance of a conductor could cause the signal voltage levels to drift toward the positive voltage making it difficult to identify when the transmitted signal was supposed to be zero volts. To solve the drift problem, some physical lines use polar signaling. In this case, the zero volt level is replaced with a voltage that is equal in magnitude and opposite in polarity to the positive voltage. Bipolar signaling is a further extension of polar signaling. Bipolar brings back the zero volt level along with the positive or high level and the negative or low level so that there are three electrical levels. -

Modulation Copper Access Technologies Wireless Subscriber Line Cable Television
Dr. Beinschróth József Telecommunication informatics I. Part 2 ÓE-KVK Budapest, 2019. Dr. Beinschróth József: : Telecommunication informatics I. Content Network architectures: collection of recommendations The Physical Layer: transporting bits The Data Link Layer: Logical Link Control and Media Access Control Examles for technologies based on the Data Link Layer The Network Layer 1: functions and protocols The Network Layer 2: routing Examle for technology based on the Network Layer The Transport Layer The Application Layer Criptography IPSec, VPN and border protection QoS and multimedia Additional chapters Dr. Beinschróth József: : Telecommunication informatics I. 2 Content of this chapter (1) Network models Theory Media for Data Transmission Twisted Pair Coaxial cable and optical fiber Wireless Data transmission Network topology PSTN Data Transmission Main Parameters of the Physical Layer Mechanical and electrical parameters Functional parameters Approaching from the physical layer Baseband transmission Bitflow (stream) transmission with modulation Copper access technologies Wireless subscriber line Cable Television Dr. Beinschróth József: : Telecommunication informatics I. 3 The physical layer: The lowest layer of the OSI model OSI TCP/IP Hybrid Application Layer Presentation Layer Application Layer Application Layer Session Layer Transport Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Data Link Layer Data Link Layer Physical Layer Physical Layer Physical Layer Network -
IEEE802.3Z Gigabit Ethernet UTP5 Proposal V2.0 November, 1996
IEEE802.3z Gigabit Ethernet UTP5 Proposal V2.0 Project: IEEE 802.3z Gigabit Ethernet Task Force Source: Steve Dabecki ([email protected]) Barry Hagglund ([email protected]) Richard Cam ([email protected]) Vern Little ([email protected]) Iain Verigin ([email protected]) PMC-Sierra Inc 105-8555 Baxter Place Burnaby BC Canada V5A 4V7 Tel: 604.415.6000 Web: http://www.pmc-sierra.com Title: Physical Layer Proposal for 1 Gbit/s Full / Half Duplex Ethernet Transmission over Single (4-pair) or Dual (8-pair) UTP-5 Cable. Issue: 2.0 Date: November 11-14, 1996 Abstract The extension of the current IEEE802.3 specifications to support a bit rate of 1Gbps is currently under investigation by the HSSG. These bit rates are regarded to be essential to support the high bandwidth requirements of mixed 10BASE and 100BASE networks, and many applications requiring a dedicated high speed link to a server. The HSSG has already made excellent progress in the way of defining 1000BASE for fibre. This contribution outlines an approach for supporting 1Gbps, either half or full- duplex, over single (4-pair) or dual (8-pair) unshielded twisted pair category 5 (UTP-5) cable. Notice This contribution has been prepared to assist the IEEE802.3z HSSG. This document is offered to the IEEE802.3z HSSG as a basis for discussion and is not a binding proposal on PMC-Sierra, Inc. or any other company. The statements are subject to change in form and/or content after further study. Specifically, PMC-Sierra, Inc. -

Analog Signal Is Unknown in Advance the Form Is Known in Advance Each Relay Amplifies Both the Signal and the Noise
Signal Transmission Fundamentals Advanced Computing and Networking Introduction Joint master program Skoltech and CMC MSU Prof. R. Smelyanskiy Signals, Data, Transmission • Data - a description of facts, phenomena • Signals - presentation of data during transmission • Transmission is the process of interaction between a transmitter and a receiver in order to transmit a signal. Data Signals • Origin data can take many forms • Signals - analog vs digital - analog vs digital • Analog data: voice video • Discrete data (digital) - text: letter, symbol - picture: pixel AC&N Prof. R. Smelyanskiy 14-Sep-20 2 The mathematical representation of the signal AC&N Prof. R. Smelyanskiy 14-Sep-20 3 Signal spectrum AC&N Prof. R. Smelyanskiy 14-Sep-20 4 Fourier transformation Euler's formula Euler's formula AC&N Prof. R. Smelyanskiy 14-Sep-20 5 Discrete Fourier Transformation Direct Fourier Transformation: N is the number of signal values measured over a period, as well as the number of decomposition components; xn, n = 0, ..., N - 1, are the measured signal values (in discrete time N - 1), which are input data for direct transformation and output for the inverse one; Xk, (k = 0, ..., N – 1 are the indexes of the amplitudes in a complex form of the sinusoidal signals composing the original Invers Fourier Transformation : one) are output for direct conversion and input for inverse; since the amplitudes are complex, then they can be used to calculate both the amplitude and phase; k is the frequency index. The frequency of the k-th signal is k / T, where T is the period of time during which the input data was taken.