Shahabi-Adib-Masc-ECE-August
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Telecommunications—Page 1
Commerce Control List Supplement No. 1 to Part 774 Category 5 - Telecommunications—page 1 CATEGORY 5 – NS applies to 5A001.b NS Column 2 TELECOMMUNICATIONS AND (except .b.5), .c, .d, .f “INFORMATION SECURITY” (except f.3), and .g. Part 1 – TELECOMMUNICATIONS SL applies to 5A001.f.1 A license is required for all destinations, as Notes: specified in §742.13 of the EAR. Accordingly, 1. The control status of “components,” test a column specific to and “production” equipment, and “software” this control does not therefor which are “specially designed” for appear on the telecommunications equipment or systems is Commerce Country determined in Category 5, Part 1. Chart (Supplement No. 1 to Part 738 of the N.B.: For “lasers” “specially designed” for EAR). telecommunications equipment or systems, see ECCN 6A005. Note to SL paragraph: This licensing 2. “Digital computers”, related equipment requirement does not or “software”, when essential for the operation supersede, nor does it and support of telecommunications equipment implement, construe or described in this Category, are regarded as limit the scope of any “specially designed” “components,” provided criminal statute, they are the standard models customarily including, but not supplied by the manufacturer. This includes limited to the Omnibus operation, administration, maintenance, Safe Streets Act of engineering or billing computer systems. 1968, as amended. AT applies to entire AT Column 1 entry A. “END ITEMS,” “EQUIPMENT,” “ACCESSORIES,” “ATTACHMENTS,” Reporting Requirements “PARTS,” “COMPONENTS,” AND “SYSTEMS” See § 743.1 of the EAR for reporting requirements for exports under License Exceptions, and Validated End-User 5A001 Telecommunications systems, authorizations. equipment, “components” and “accessories,” as follows (see List of Items Controlled). -

Criteria for Choosing Line Codes in Data Communication
ISTANBUL UNIVERSITY – YEAR : 2003 (843-857) JOURNAL OF ELECTRICAL & ELECTRONICS ENGINEERING VOLUME : 3 NUMBER : 2 CRITERIA FOR CHOOSING LINE CODES IN DATA COMMUNICATION Demir Öner Istanbul University, Engineering Faculty, Electrical and Electronics Engineering Department Avcılar, 34850, İstanbul, Turkey E-mail: [email protected] ABSTRACT In this paper, line codes used in data communication are investigated. The need for the line codes is emphasized, classification of line codes is presented, coding techniques of widely used line codes are explained with their advantages and disadvantages and criteria for chosing a line code are given. Keywords: Line codes, correlative coding, criteria for chosing line codes.. coding is either performed just before the 1. INTRODUCTION modulation or it is combined with the modulation process. The place of line coding in High-voltage-high-power pulse current The transmission systems is shown in Figure 1. purpose of applying line coding to digital signals before transmission is to reduce the undesirable The line coder at the transmitter and the effects of transmission medium such as noise, corresponding decoder at the receiver must attenuation, distortion and interference and to operate at the transmitted symbol rate. For this ensure reliable transmission by putting the signal reason, epecially for high-speed systems, a into a form that is suitable for the properties of reasonably simple design is usually essential. the transmission medium. For example, a sampled and quantized signal is not in a suitable form for transmission. Such a signal can be put 2. ISSUES TO BE CONSIDERED IN into a more suitable form by coding the LINE CODING quantized samples. -
Telematics Chapter 3: Physical Layer
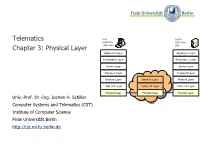
Telematics User Server watching with video Chapter 3: Physical Layer video clip clips Application Layer Application Layer Presentation Layer Presentation Layer Session Layer Session Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Data Link Layer Data Link Layer Data Link Layer Physical Layer Physical Layer Physical Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller Computer Systems and Telematics (CST) Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de Contents ● Design Issues ● Theoretical Basis for Data Communication ● Analog Data and Digital Signals ● Data Encoding ● Transmission Media ● Guided Transmission Media ● Wireless Transmission (see Mobile Communications) ● The Last Mile Problem ● Multiplexing ● Integrated Services Digital Network (ISDN) ● Digital Subscriber Line (DSL) ● Mobile Telephone System Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.2 Design Issues Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.3 Design Issues ● Connection parameters ● mechanical OSI Reference Model ● electric and electronic Application Layer ● functional and procedural Presentation Layer ● More detailed ● Physical transmission medium (copper cable, Session Layer optical fiber, radio, ...) ● Pin usage in network connectors Transport Layer ● Representation of raw bits (code, voltage,…) Network Layer ● Data rate ● Control of bit flow: Data Link Layer ● serial or parallel transmission of bits Physical Layer ● synchronous or asynchronous transmission ● simplex, half-duplex, or full-duplex transmission mode Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.4 Design Issues Transmitter Receiver Source Transmission System Destination NIC NIC Input Abcdef djasdja dak jd ashda kshd akjsd asdkjhasjd as kdjh askjda Univ.-Prof. -

A Guide to Making RF Measurements for Signal Integrity Applications
White Paper A Guide to Making RF Measurements for Signal Integrity Applications Introduction Designing a system for Signal Integrity requires a great deal of knowledge and tremendous effort from all disciplines involved. Higher data rates and more complex modulation schemes are requiring digital engineers to take into account the analog and RF performance of the channels to a much greater degree than in the past. Moreover, increasing performance demands are requiring digital engineers move from oscilloscopes and TDRs to vector network analyzers (VNAs), with which they may be less familiar. Correspondingly, RF measurement groups within companies are being called on by their digital colleagues to help them with making VNA measurements. This paper is intended to review signal integrity-based VNA measurements for digital engineers and correlate VNA measurements to key signal integrity parameters for RF engineers. Contents The Driving Need for RF Measurements ...........................................................................................................3 Understanding Signal Integrity Terms and Measurements ...........................................................................4 Eye Diagrams .................................................................................................................................................4 Dispersion .......................................................................................................................................................4 High Frequency Loss /Attenuation -
LVDS Application and Data Handbook
LVDS Application and Data Handbook High-Performance Linear Products Technical Staff Literature Number: SLLD009 November 2002 Printed on Recycled Paper IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed. TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third–party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. -

Design and Performance Evaluation of QPSK Modulation And
International Conference on Applied Science and Engineering Innovation (ASEI 2015) Design and Performance Evaluation of QPSK Modulation and Demodulation in SS mode Based on Systemview Sheng LIANGa, Gaofeng PANb, Youxing WU, Yong XIEc China Satellite Maritime Tracking and Control Department, Jiangyin, Jiangsu, 214431,China a [email protected], b [email protected], c [email protected] Keywords: SS; QPSK; Eye Diagram. Abstract. Because the modulation and demodulation method in SS (Spread Spectrum) mode is different with sub-carrier TT&C system, so it is necessary to realize its performance evaluation based on software simulation. This paper makes use of Systemview to simulate the single target measurement in SS system and evaluate its anti-noise performance by eye diagram and BER. Results show the simulation model designed in this paper is feasible and Systemview can visualize abstract communication simulation. Introduction The present SS TT&C system has two kinds, which are coherent and non-coherent SS modes. In coherent mode, telecommand message is embedded in branch I of QPSK modulation after encoded with short PN code (period 210-1), distance measure message is embedded in branch Q after encoded with long PN code (period (210-1)×256) and the two branch signals with different powers compose UQPSK signal. In non-coherent mode, two branch messages encoded with short PN code are BPSK modulated respectively, which will be transmitted to the satellite after up-conversion and power amplification. This paper sets conditions to unitize the two modes and designs the modulation & demodulation simulation model based on Systemview to evaluate performance of SS mode. -
CODING for Transmission
CODING for Transmission Professor Izzat Darwazeh Head of Communicaons and Informaon System Group University College London [email protected] Acknowledgement: Dr A. Chorti, Princeton University for slides on FEC coding Dr P.Moreira, CERN, for slides on the CERN Gigabit Transmitter (GBT) Dr J. Mitchell, UCL, for the sampled music and voice. June 2011 Coding • Defini7ons and basic concepts • Source coding • Line coding • Error control coding Digital Line System Message Message source Distortion, sink interference Input Output signal and noise signal Encoder- Demodulator modulator -decoder Communication Transmitted channel Received signal signal Claude Shannon • Shannon’s Theorem predicts reliable communicaon in the presence of noise “Given a discrete, memoryless channel with capacity C, and a source with a posi8ve rate R (R<C), there exist a code such that the output of the source can be transmi@ed over the channel with an arbitrarily small probability of error.” • B is the channel bandwidth in Hz and S/N is the signal power to noise power rao ⎛⎞S CBc =+log2 ⎜⎟ 1 ⎝⎠N Types of Coding • Source Coding – Encoding the raw data • Line (or channel) Coding – Formang of the data stream to benefit transmission • Error Detec7on Coding – Detec7on of errors in the data seQuence • Error Correcon Coding – Detec7on and Correc7on of Errors • Spread Spectrum Coding – Used for wireless communicaons Signals and sources: Discrete - Con8nuous m(t) n Continuous Time and Amplitude n Discrete Time, continuous Amplitude – PAM signal n Discrete Time, and Amplitude -

HP Probook 440 G6 Notebook PC Quickspecs
HP ProBook 440 G6 Notebook PC QuickSpecs Overview HP ProBook 440 G6 Notebook PC Left 1. Internal Microphones (2) 6. SD Card Reader 2. Webcam 7. Thermal Vent 3. Webcam LED 8. USB 2.0 Port 4. Clickpad 9. Standard Security Lock Slot (Lock sold separately) 5. Hard Drive LED 10. Power Button Not all configuration components are available in all regions/countries. c06142920 — DA 16311 - Worldwide — Version 19 — April 22, 2020 Page 1 HP ProBook 440 G6 Notebook PC QuickSpecs Overview Right 1. Power Connector 5. USB 3.1 Gen 1 Port 2. USB Type-C™ 3.1 Gen 1 Port 6. USB 3.1 Gen 1 Port 3. Ethernet Port (RJ-45) 7. Headphone/Microphone Combo Jack 4. HDMI Port (Cable not included) 8. HP Fingerprint Sensor (select models) Not all configuration components are available in all regions/countries. c06142920 — DA 16311 - Worldwide — Version 19 — April 22, 2020 Page 2 HP ProBook 440 G6 Notebook PC QuickSpecs Overview At a Glance • Preinstall with Windows 10 versions or FreeDOS 3.0 • Choice of 8th Generation Intel® Core™ i7, i5, i3 processors • Display include your choice of 35.56 cm (14.0") diagonal HD, Ultra Wide Viewing Angle FHD, Touch or Non-Touch • Optional Nvidia GeForce MX250 and MX130 with 2 GB GDDR5 dedicated video memory or integrated Intel® HD Graphics 610 or Intel® UHD 620 • Enhanced security features including TPM2.0, HP BIOSphere, Hardware enforced Firmware Protection, HP Fingerprint Sensor3 (select models) and optional IR camera • Passed 19 items of MIL-STD 810G testing plus an additional 120,000 hours of reliability testing through HP's Total -
AN-808 Long Transmission Lines and Data Signal Quality
Application Report SNLA028–May 2004 AN-808 Long Transmission Lines and Data Signal Quality ..................................................................................................................................................... ABSTRACT This application note explores another important transmission line characteristic, the reflection coefficient. This concept is combined with the material in AN-806 to present graphical and analytical methods for determining the voltages and currents at any point on a line with respect to distance and time. The effects of various source resistances and line termination methods on the transmitted signal are also discussed. This application note is a revised reprint of section four of the Fairchild Line Driver and Receiver Handbook. This application note, the third of a three part series (See AN-806 and AN-807), covers the following topics: Contents 1 Overview ..................................................................................................................... 3 2 Introduction .................................................................................................................. 3 3 Factors Causing Signal Wave Shape Changes ......................................................................... 4 4 Influence of Loss Effects on Primary Line Parameters ................................................................ 5 5 Variations in Z0, α(ω), and Propagation Velocity ........................................................................ 6 6 Signal Quality—Terms .................................................................................................... -

Episode 3.11 – Polar and Bipolar Line Coding
Episode 3.11 – Polar and Bipolar Line Coding Welcome to the Geek Author series on Computer Organization and Design Fundamentals. I’m David Tarnoff, and in this series we are working our way through the topics of Computer Organization, Computer Architecture, Digital Design, and Embedded System Design. If you’re interested in the inner workings of a computer, then you’re in the right place. The only background you’ll need for this series is an understanding of integer math, and if possible, a little experience with a programming language such as Java. And one more thing. Our topics involve a bit of figuring, so it might help to keep a pencil and paper handy. In Episode 3.10, we looked at the electrical connection between two digital devices and saw two ways we could use a positive voltage and a zero voltage level to code the logic zeros and logic ones of our data. This unipolar scheme had a disadvantage. The capacitance of a conductor could cause the signal voltage levels to drift toward the positive voltage making it difficult to identify when the transmitted signal was supposed to be zero volts. To solve the drift problem, some physical lines use polar signaling. In this case, the zero volt level is replaced with a voltage that is equal in magnitude and opposite in polarity to the positive voltage. Bipolar signaling is a further extension of polar signaling. Bipolar brings back the zero volt level along with the positive or high level and the negative or low level so that there are three electrical levels. -

Comparative Analysis Between NRZ and RZ Coding of WDM System
ISSN (Online) 2278-1021 IJARCCE ISSN (Print) 2319 5940 International Journal of Advanced Research in Computer and Communication Engineering Vol. 5, Issue 6, June 2016 Comparative Analysis between NRZ and RZ Coding of WDM System Supinder Kaur1, Simarpreet Kaur2 M.Tech Student, ECE Department, Baba Banda Singh Bahadur Engineering College, Fatehgarh Sahib, India1 Assistant Professor, ECE Department, Baba Banda Singh Bahadur Engineering College, Fatehgarh Sahib, India2 Abstract: An ameliorated performance of optical wireless transmission system is obtained from wireless system which deploys the lengthy fibers. Inter-satellite links are necessary between satellites in orbits around the earth for data transmission and also for orderly data relay from one satellite to other and then to ground stations. Inter-satellite Optical Wireless Communication bestows the use of wireless optical communication using lasers instead of conventional radio and microwave systems. Optical communication using lasers cater many benefits over conventional radio frequency systems. The utmost complication existing in this wireless optical communication for inter-satellite links is the affects of satellite vibration, which leads to severe pointing errors that degrade the performance. Performance of this system also depends on numerous parameters such as transmitted power, data rate and antenna aperture which are analyzed using Opti-System simulation software. The main objective of this is to introduce WDM in existing ISOWC system to improve the system capability, to implement Model with different coding NRZ and RZ, to propose a new approach for increasing system capability for multi users and also analysis the Performance parameters like BER, Q-factor of optical systems. Keywords: BER, FSO, Inter Satellite Link (ISL), IsOWC, Q-factor, Return-to-zero(RZ), Non Return-to-zero(NRZ). -
Creating Eye Diagrams Using Vectorstar Snp Files and AWR
Application Note Creating Eye Diagrams using VectorStar™ SnP files and AWR Microwave Office® MS4640B Series Vector Network Analyzer 1 Introduction As data rates and design complexity continues to increase, signal integrity becomes an integral part of the design and verification process. At first glance, one might assume that because digital signals are represented by discrete voltage (or current) levels, signal integrity may not be of major concern to digital designers. However, digital signals are fundamentally analog in nature, and all signals are subject to effects such as noise, distortion, and loss. Over short distances and at low bit rates, a simple conductor can transmit digital signals reliably without much distortion, but at high bit rates and over longer distances or through various media, various effects can degrade the electrical signal to the point where errors occur and the system or device fails. Today, it is common to see devices and systems operating at multi-GHz data rates. Digital signals being transmitted over relatively long transmission lines or through differing materials also present signal integrity challenges. Because of these challenges, a host of variables can affect the integrity of signals, including transmission-line effects, impedance mismatches, signal routing, termination schemes, and grounding schemes. One tool used to characterize these effects is the eye diagram. With eye diagrams, engineers can quickly evaluate system performance and gain insight into the nature of channel imperfections that can lead to errors when a receiver tries to interpret the value of a transmitted data bit. This application note reviews basic eye diagram definitions and terminologies. It will include a measurement example showing how to import a S-Paramater File of a device measured by an Anritsu VectorStar VNA into AWR’s Microwave Office application to generate an Eye Diagram.