LVDS Application and Data Handbook
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Telecommunications—Page 1
Commerce Control List Supplement No. 1 to Part 774 Category 5 - Telecommunications—page 1 CATEGORY 5 – NS applies to 5A001.b NS Column 2 TELECOMMUNICATIONS AND (except .b.5), .c, .d, .f “INFORMATION SECURITY” (except f.3), and .g. Part 1 – TELECOMMUNICATIONS SL applies to 5A001.f.1 A license is required for all destinations, as Notes: specified in §742.13 of the EAR. Accordingly, 1. The control status of “components,” test a column specific to and “production” equipment, and “software” this control does not therefor which are “specially designed” for appear on the telecommunications equipment or systems is Commerce Country determined in Category 5, Part 1. Chart (Supplement No. 1 to Part 738 of the N.B.: For “lasers” “specially designed” for EAR). telecommunications equipment or systems, see ECCN 6A005. Note to SL paragraph: This licensing 2. “Digital computers”, related equipment requirement does not or “software”, when essential for the operation supersede, nor does it and support of telecommunications equipment implement, construe or described in this Category, are regarded as limit the scope of any “specially designed” “components,” provided criminal statute, they are the standard models customarily including, but not supplied by the manufacturer. This includes limited to the Omnibus operation, administration, maintenance, Safe Streets Act of engineering or billing computer systems. 1968, as amended. AT applies to entire AT Column 1 entry A. “END ITEMS,” “EQUIPMENT,” “ACCESSORIES,” “ATTACHMENTS,” Reporting Requirements “PARTS,” “COMPONENTS,” AND “SYSTEMS” See § 743.1 of the EAR for reporting requirements for exports under License Exceptions, and Validated End-User 5A001 Telecommunications systems, authorizations. equipment, “components” and “accessories,” as follows (see List of Items Controlled). -

RS-485: Still the Most Robust Communication Table of Contents
TUTORIAL RS-485: Still the Most Robust Communication Table of Contents Abstract...........................................................................................................................1 RS-485 vs. RS-422..............................................................................................................................2 An In-Depth Look at RS-485...........................................................................................................3 Challenges of the Industrial Environment.....................................................................................5 Protecting Systems from Harsh Environments.........................................................................5 Conclusion......................................................................................................................10 References......................................................................................................................10 Abstract Despite the rise in popularity of wireless networks, wired serial networks continue to provide the most robust, reliable communication, especially in harsh environments. These well-engineered networks provide effective communication in industrial and building automation applications, which require immunity from noise, electrostatic discharge and voltage faults, all resulting in increased uptime. This tutorial reviews the RS-485 protocol and discusses why it is widely used in industrial applications and the common problems it solves. www.maximintegrated.com -

Shahabi-Adib-Masc-ECE-August
A New Line Code for a Digital Communication System by Adib Shahabi Submitted in partial fulfilment of the requirements for the degree of Master of Applied Science at Dalhousie University Halifax, Nova Scotia August 2019 © Copyright by Adib Shahabi, 2019 To my wife Shahideh ii TABLE OF CONTENTS LIST OF TABLES ............................................................................................................ v LIST OF FIGURES .......................................................................................................... vi ABSTRACT ....................................................................................................................viii LIST OF ABBREVIATIONS USED ............................................................................... ix ACKNOWLEDGEMENTS ............................................................................................... x CHAPTER 1 INTRODUCTION ....................................................................................... 1 1.1 BACKGROUND ........................................................................................... 1 1.2 THESIS SYNOPSIS ...................................................................................... 4 1.3 ORGANIZATION OF THE THESIS ............................................................ 5 CHAPTER 2 MODELLING THE LINE CHANNEL ....................................................... 7 2.1 CABLE MODELLING .................................................................................. 7 2.2 TRANSFORMER COUPLING .................................................................. -
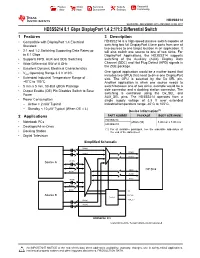
HD3SS214 8.1Gbps Displayport 1.4 2:1/1:2
Product Order Technical Tools & Support & Folder Now Documents Software Community HD3SS214 SLAS907B –DECEMBER 2015–REVISED JUNE 2017 HD3SS214 8.1 Gbps DisplayPort 1.4 2:1/1:2 Differential Switch 1 Features 3 Description HD3SS214 is a high-speed passive switch capable of 1• Compatible with DisplayPort 1.4 Electrical Standard switching two full DisplayPort 4 lane ports from one of two sources to one target location in an application. It • 2:1 and 1:2 Switching Supporting Data Rates up will also switch one source to one of two sinks. For to 8.1 Gbps DisplayPort Applications, the HD3SS214 supports • Supports HPD, AUX and DDC Switching switching of the Auxiliary (AUX), Display Data • Wide Differential BW of 8 GHz Channel (DDC) and Hot Plug Detect (HPD) signals in the ZQE package. • Excellent Dynamic Electrical Characteristics • V Operating Range 3.3 V ±10% One typical application would be a mother board that DD includes two GPUs that need to drive one DisplayPort • Extended Industrial Temperature Range of sink. The GPU is selected by the Dx_SEL pin. -40°C to 105°C Another application is when one source needs to • 5 mm x 5 mm, 50-Ball ųBGA Package switch between one of two sinks, example would be a • Output Enable (OE) Pin Disables Switch to Save side connector and a docking station connector. The Power switching is controlled using the Dx_SEL and AUX_SEL pins. The HD3SS214 operates from a • Power Consumption single supply voltage of 3.3 V over extended – Active < 2 mW Typical industrial temperature range -40°C to 105°C. -

Displayport to TMDS Level Shifting Re-Driver Check for Samples: SN75DP139
SN75DP139 www.ti.com SLLS977D –APRIL 2009–REVISED JULY 2013 DisplayPort to TMDS Level Shifting Re-driver Check for Samples: SN75DP139 1FEATURES • DisplayPort Physical Layer Input Port to TMDS • Enhanced ESD: 10kV on All Pins Physical Layer Output Port • Enhanced Commercial Temperature Range: • Integrated TMDS Level Shifting Re-driver With 0°C to 85°C Receiver Equalization • 48 Pin 7 × 7 QFN (RGZ) Package • Supports Data Rates up to 3.4Gbps • 40 Pin 5 x 5 QFN (RSB) Package • Achieves HDMI 1.4b Compliance • 3D HDMI Support With TMDS Clock Rates up APPLICATIONS to 340MHz • Personal Computer Market • 4k x 2k Operation (30Hz, 24bpp) – DP/TMDS Dongle • Deep Color Supporting 36bpp – Desktop PC • Integrated I2C Logic Block for DVI/HDMI – Notebook PC Connector Recognition – Docking Station 2 • Integrated Active I C Buffer – Standalone Video Card DESCRIPTION The SN75DP139 is a Dual-Mode DisplayPort input to Transition-Minimized Differential Signaling (TMDS) output. The TMDS output has a built in level shifting re-driver supporting Digital Video Interface (DVI) 1.0 and High Definition Multimedia Interface (HDMI) 1.4b standards. The SN75DP139 is specified up to a maximum data rate of 3.4Gbps, supporting resolutions greater then 1920x1200 or HDTV 12 bit color depth at 1080p (progressive scan). SN75DP139 is compliant with the HDMI 1.4b specifications and supports optional protocol enhancements such as 3D graphics at resolutions demanding a pixel rate up to 340MHz. An integrated Active I2C buffer isolates the capacitive loading of the source system from that of the sink and interconnecting cable. This isolation improves overall signal integrity of the system and allows for considerable design margin within the source system for DVI / HDMI compliance testing. -

Serial ATA Interface
Serial ATA Interface Frank R. Chu Senior Engineer Hitachi Global Storage Technologies June 2003 Why do we need a new interface? Limitations of parallel ATA Serial ATA was designed to overcome a number of limitations of parallel ATA. The most significant limitation of parallel ATA is the difficulty in increasing the data rate beyond 100MB/s. Parallel ATA uses a single-ended signaling system that is prone to induced noise. Increasing the parallel data rate beyond 100 MB/s would require a new signaling system that would not be backward compatible with existing systems. Desktop HDDs can be expected to outrun the 100 Mbytes/sec data rate in the next few years so a new system is needed. An additional limitation is that parallel ATA uses 5V signaling levels and upcoming silicon microelectronic processes are not compatible with 5V signaling. Serial ATA overcomes these issues by moving to 250mV differential signaling method. Differential signaling rejects induced noise. The 250mV differential signal level is compatible with future microelectronic fabrication processes. Parallel ATA Topology Serial ATA Topology Parallel ATA Topology Serial ATA Topology Operating system Operating System Serial ATA ATA Application 1 Application 1 Standard Adapter adapter Disk Driver Application 2 Driver Application 2 Drive Disk Application 3 Disk Disk Application 3 Drive drive drive Forecasts Indicate ATA Dominance ATA is the dominant HDD interface in the industry. The ATA interface market is expected to be approximately 190 million units in 2003, accounting for about 90% of all HDDs shipped, according to International Data Corporations (IDC) 2002/03 forecasts. By 2006, IDC projects ATA unit shipments will increase to beyond 310 million and continue to account for 90% of all HDDs shipments. -

HP Probook 440 G6 Notebook PC Quickspecs
HP ProBook 440 G6 Notebook PC QuickSpecs Overview HP ProBook 440 G6 Notebook PC Left 1. Internal Microphones (2) 6. SD Card Reader 2. Webcam 7. Thermal Vent 3. Webcam LED 8. USB 2.0 Port 4. Clickpad 9. Standard Security Lock Slot (Lock sold separately) 5. Hard Drive LED 10. Power Button Not all configuration components are available in all regions/countries. c06142920 — DA 16311 - Worldwide — Version 19 — April 22, 2020 Page 1 HP ProBook 440 G6 Notebook PC QuickSpecs Overview Right 1. Power Connector 5. USB 3.1 Gen 1 Port 2. USB Type-C™ 3.1 Gen 1 Port 6. USB 3.1 Gen 1 Port 3. Ethernet Port (RJ-45) 7. Headphone/Microphone Combo Jack 4. HDMI Port (Cable not included) 8. HP Fingerprint Sensor (select models) Not all configuration components are available in all regions/countries. c06142920 — DA 16311 - Worldwide — Version 19 — April 22, 2020 Page 2 HP ProBook 440 G6 Notebook PC QuickSpecs Overview At a Glance • Preinstall with Windows 10 versions or FreeDOS 3.0 • Choice of 8th Generation Intel® Core™ i7, i5, i3 processors • Display include your choice of 35.56 cm (14.0") diagonal HD, Ultra Wide Viewing Angle FHD, Touch or Non-Touch • Optional Nvidia GeForce MX250 and MX130 with 2 GB GDDR5 dedicated video memory or integrated Intel® HD Graphics 610 or Intel® UHD 620 • Enhanced security features including TPM2.0, HP BIOSphere, Hardware enforced Firmware Protection, HP Fingerprint Sensor3 (select models) and optional IR camera • Passed 19 items of MIL-STD 810G testing plus an additional 120,000 hours of reliability testing through HP's Total -

Comparative Analysis Between NRZ and RZ Coding of WDM System
ISSN (Online) 2278-1021 IJARCCE ISSN (Print) 2319 5940 International Journal of Advanced Research in Computer and Communication Engineering Vol. 5, Issue 6, June 2016 Comparative Analysis between NRZ and RZ Coding of WDM System Supinder Kaur1, Simarpreet Kaur2 M.Tech Student, ECE Department, Baba Banda Singh Bahadur Engineering College, Fatehgarh Sahib, India1 Assistant Professor, ECE Department, Baba Banda Singh Bahadur Engineering College, Fatehgarh Sahib, India2 Abstract: An ameliorated performance of optical wireless transmission system is obtained from wireless system which deploys the lengthy fibers. Inter-satellite links are necessary between satellites in orbits around the earth for data transmission and also for orderly data relay from one satellite to other and then to ground stations. Inter-satellite Optical Wireless Communication bestows the use of wireless optical communication using lasers instead of conventional radio and microwave systems. Optical communication using lasers cater many benefits over conventional radio frequency systems. The utmost complication existing in this wireless optical communication for inter-satellite links is the affects of satellite vibration, which leads to severe pointing errors that degrade the performance. Performance of this system also depends on numerous parameters such as transmitted power, data rate and antenna aperture which are analyzed using Opti-System simulation software. The main objective of this is to introduce WDM in existing ISOWC system to improve the system capability, to implement Model with different coding NRZ and RZ, to propose a new approach for increasing system capability for multi users and also analysis the Performance parameters like BER, Q-factor of optical systems. Keywords: BER, FSO, Inter Satellite Link (ISL), IsOWC, Q-factor, Return-to-zero(RZ), Non Return-to-zero(NRZ). -

MODULE III SIGNAL ENCODING TECHNIQUES WS 148 for Digital
MODULE III SIGNAL ENCODING TECHNIQUES WS 148 For digital signaling, a data source g(t), which may be either digital or analog, is encoded into a digital signal x(t).The actual form of x(t) depends on the encoding technique and is chosen to optimize use of the transmission medium. The basis for analog signaling is a continuous constant-frequency signal known as the carrier signal. Modulation is the process of encoding source data onto a carrier signal with frequency All modulation techniques involve operation on one or more of the three fundamental frequency domain parameters: amplitude, frequency, and phase. The input signal m(t) may be analog or digital and is called the modulating signal or baseband signal. The result of modulating the carrier signal is called the modulated signal s(t). It is a bandlimited (bandpass) signal. The location of the bandwidth on the spectrum is related to fc and is often centered on fc. Both analog and digital information can be encoded as either analog or digital signals. 1. Digital data, Digital signal 2. Digital data, Analog signal 3. Analog data, Digital signal 4. Analog data, Analog signal DIGITAL DATA, DIGITAL SIGNAL The simplest form of digital encoding of digital data is to assign one voltage level to binary one and another to binary zero. A digital signal is a sequence of discrete, discontinuous voltage pulses. Each pulse is a signal element. Binary data are transmitted by encoding each data bit into signal elements. Binary 1 is represented by a lower voltage level and binary 0 by a higher voltage level. -
FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection
FUSB1500 / FUSB1501 — USB2.0 Full-Speed April 2011 FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection Features Description . Complies with USB2.0 Specification The FUSB1500 is a USB2.0 FS/LS transceiver with resistive charger detection. It is compliant with the . Supports 12Mbps and 1.5Mbps USB2.0 Speeds Universal Serial Bus Specification, Rev. 2.0 (USB2.0). - Single Ended (SE) Mode Signaling Ideal for portable electronic devices; such as mobile - Slew-Rate Controlled Differential Data Driver phones, digital still cameras, and personal digital - Differential Input Receiver with Wide Common- assistants; it allows USB Application Specific ICs Mode Range and High Input Sensitivity (ASICs) and Programmable Logic Devices (PLDs) with Low-Speed Transceiver with Charger Detection - Stable RCV Output during SE0 Condition power supply voltages from 1.65V to 3.6V to interface with the physical layer of the Universal Serial Bus. - Two Single-Ended Receivers with Hysteresis The FUSB1500 can be used as a USB device Supports I/O Voltage: 1.65V to 3.6V . transceiver or a USB host transceiver. It can transmit and receive serial data at both full-speed (12Mbps) and Applications low-speed (1.5Mbps) data rates. The FUSB1500 supports the SE Mode controller . Dual-Camera Applications for Cell Phones interface. Dual-LCD Applications for Cell Phones, Digital Camera Displays, and Viewfinders IMPORTANT NOTE: For additional performance information, please contact [email protected]. Ordering Information Operating Top Packing Part Number Temperature Package Mark Method Range FUSB 16-Pin, Molded Leadless Package (MLP), FUSB1500MHX -40 to +85°C Tape and Reel 1500 JEDEC MO217 Equivalent, 3mm Square © 2008 Fairchild Semiconductor Corporation www.fairchildsemi.com FUSB1500 • Rev. -
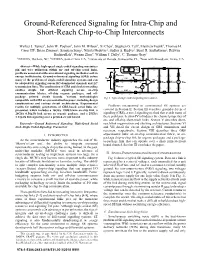
Ground-Referenced Signaling for Intra-Chip and Short-Reach Chip-To-Chip Interconnects
Ground-Referenced Signaling for Intra-Chip and Short-Reach Chip-to-Chip Interconnects Walker J. Turner1, John W. Poulton1, John M. Wilson1, Xi Chen2, Stephen G. Tell1, Matthew Fojtik1, Thomas H. Greer III1, Brian Zimmer2, Sanquan Song2, Nikola Nedovic2, Sudhir S. Kudva2, Sunil R. Sudhakaran2, Rizwan Bashirullah3, Wenxu Zhao4, William J. Dally2, C. Thomas Gray1 1NVIDIA, Durham, NC, 2NVIDIA, Santa Clara, CA, 3University of Florida, Gainesville, FL, 4Now with Broadcom, Irvine, CA Abstract—While high-speed single-ended signaling maximizes VDD pin and wire utilization within on- and off-chip serial links, VREF problems associated with conventional signaling methods result in R R energy inefficiencies. Ground-referenced signaling (GRS) solves DRIVE+ TERM TXDAT LINE many of the problems of single-ended signaling systems and can + RXDAT C CEXT + V be adapted for signaling across RC-dominated channels and LC - INT - DD RDRIVE- + transmission lines. The combination of GRS and clock forwarding VREF - enables simple but efficient signaling across on-chip GND communication fabrics, off-chip organic packages, and off- package printed circuit boards. Various methodologies Fig. 1. Typical single-ended signaling interconnect. compatible with GRS are presented in this paper, including design considerations and various circuit architectures. Experimental results for multiple generations of GRS-based serial links are Problems encountered in conventional SE systems are presented, which includes a 16Gb/s 170fJ/b/mm on-chip link, a covered in Section II. Section III describes ground-referenced 20Gb/s 0.58pJ/b link across an organic package, and a 25Gb/s signaling (GRS), a novel signaling method that avoids many of 1.17pJ/b link signaling over a printed-circuit board. -

LVDS Owner's Manual
LVDS Owner’s Manual Including High-Speed CML and Signal Conditioning High-Speed Interface Technologies Overview 9-13 Network Topology 15-17 SerDes Architectures 19-29 Termination and Translation 31-38 Design and Layout Guidelines 39-45 Jitter Overview 47-58 Interconnect Media and Signal Conditioning 59-75 I/O Models 77-82 Solutions for Design Challenges 83-101 www.ti.com/LVDS 2008 2 LVDS Owner’s Manual Including High-Speed CML and Signal Conditioning Fourth Edition 2008 www.ti.com/LVDS 3 Contents Introduction ..........................................................................7 Design and Layout Guidelines ........................................39 5.1 PCB Transmission Lines ......................................................39 High-Speed Interface Technologies Overview..............9 5.2 Transmission Loss ................................................................40 1.1 Differential Signaling Technology .......................................9 5.3 PCB Vias .................................................................................41 1.2 LVDS – Low-Voltage Differential Signaling .....................10 5.4 Backplane Subsystem .........................................................42 1.3 CML – Current-Mode Logic .................................................11 5.5 Decoupling .............................................................................44 1.4 Low-Voltage Positive-Emitter-Coupled Logic .................12 1.5 Selecting An Optimal Technology .....................................12 Jitter Overview ..................................................................47