LVDS Owner's Manual
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

RS-485: Still the Most Robust Communication Table of Contents
TUTORIAL RS-485: Still the Most Robust Communication Table of Contents Abstract...........................................................................................................................1 RS-485 vs. RS-422..............................................................................................................................2 An In-Depth Look at RS-485...........................................................................................................3 Challenges of the Industrial Environment.....................................................................................5 Protecting Systems from Harsh Environments.........................................................................5 Conclusion......................................................................................................................10 References......................................................................................................................10 Abstract Despite the rise in popularity of wireless networks, wired serial networks continue to provide the most robust, reliable communication, especially in harsh environments. These well-engineered networks provide effective communication in industrial and building automation applications, which require immunity from noise, electrostatic discharge and voltage faults, all resulting in increased uptime. This tutorial reviews the RS-485 protocol and discusses why it is widely used in industrial applications and the common problems it solves. www.maximintegrated.com -

Shahabi-Adib-Masc-ECE-August
A New Line Code for a Digital Communication System by Adib Shahabi Submitted in partial fulfilment of the requirements for the degree of Master of Applied Science at Dalhousie University Halifax, Nova Scotia August 2019 © Copyright by Adib Shahabi, 2019 To my wife Shahideh ii TABLE OF CONTENTS LIST OF TABLES ............................................................................................................ v LIST OF FIGURES .......................................................................................................... vi ABSTRACT ....................................................................................................................viii LIST OF ABBREVIATIONS USED ............................................................................... ix ACKNOWLEDGEMENTS ............................................................................................... x CHAPTER 1 INTRODUCTION ....................................................................................... 1 1.1 BACKGROUND ........................................................................................... 1 1.2 THESIS SYNOPSIS ...................................................................................... 4 1.3 ORGANIZATION OF THE THESIS ............................................................ 5 CHAPTER 2 MODELLING THE LINE CHANNEL ....................................................... 7 2.1 CABLE MODELLING .................................................................................. 7 2.2 TRANSFORMER COUPLING .................................................................. -
HD3SS214 8.1Gbps Displayport 1.4 2:1/1:2
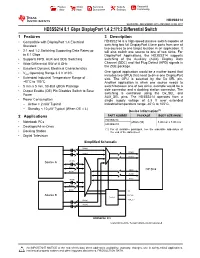
Product Order Technical Tools & Support & Folder Now Documents Software Community HD3SS214 SLAS907B –DECEMBER 2015–REVISED JUNE 2017 HD3SS214 8.1 Gbps DisplayPort 1.4 2:1/1:2 Differential Switch 1 Features 3 Description HD3SS214 is a high-speed passive switch capable of 1• Compatible with DisplayPort 1.4 Electrical Standard switching two full DisplayPort 4 lane ports from one of two sources to one target location in an application. It • 2:1 and 1:2 Switching Supporting Data Rates up will also switch one source to one of two sinks. For to 8.1 Gbps DisplayPort Applications, the HD3SS214 supports • Supports HPD, AUX and DDC Switching switching of the Auxiliary (AUX), Display Data • Wide Differential BW of 8 GHz Channel (DDC) and Hot Plug Detect (HPD) signals in the ZQE package. • Excellent Dynamic Electrical Characteristics • V Operating Range 3.3 V ±10% One typical application would be a mother board that DD includes two GPUs that need to drive one DisplayPort • Extended Industrial Temperature Range of sink. The GPU is selected by the Dx_SEL pin. -40°C to 105°C Another application is when one source needs to • 5 mm x 5 mm, 50-Ball ųBGA Package switch between one of two sinks, example would be a • Output Enable (OE) Pin Disables Switch to Save side connector and a docking station connector. The Power switching is controlled using the Dx_SEL and AUX_SEL pins. The HD3SS214 operates from a • Power Consumption single supply voltage of 3.3 V over extended – Active < 2 mW Typical industrial temperature range -40°C to 105°C. -

Displayport to TMDS Level Shifting Re-Driver Check for Samples: SN75DP139
SN75DP139 www.ti.com SLLS977D –APRIL 2009–REVISED JULY 2013 DisplayPort to TMDS Level Shifting Re-driver Check for Samples: SN75DP139 1FEATURES • DisplayPort Physical Layer Input Port to TMDS • Enhanced ESD: 10kV on All Pins Physical Layer Output Port • Enhanced Commercial Temperature Range: • Integrated TMDS Level Shifting Re-driver With 0°C to 85°C Receiver Equalization • 48 Pin 7 × 7 QFN (RGZ) Package • Supports Data Rates up to 3.4Gbps • 40 Pin 5 x 5 QFN (RSB) Package • Achieves HDMI 1.4b Compliance • 3D HDMI Support With TMDS Clock Rates up APPLICATIONS to 340MHz • Personal Computer Market • 4k x 2k Operation (30Hz, 24bpp) – DP/TMDS Dongle • Deep Color Supporting 36bpp – Desktop PC • Integrated I2C Logic Block for DVI/HDMI – Notebook PC Connector Recognition – Docking Station 2 • Integrated Active I C Buffer – Standalone Video Card DESCRIPTION The SN75DP139 is a Dual-Mode DisplayPort input to Transition-Minimized Differential Signaling (TMDS) output. The TMDS output has a built in level shifting re-driver supporting Digital Video Interface (DVI) 1.0 and High Definition Multimedia Interface (HDMI) 1.4b standards. The SN75DP139 is specified up to a maximum data rate of 3.4Gbps, supporting resolutions greater then 1920x1200 or HDTV 12 bit color depth at 1080p (progressive scan). SN75DP139 is compliant with the HDMI 1.4b specifications and supports optional protocol enhancements such as 3D graphics at resolutions demanding a pixel rate up to 340MHz. An integrated Active I2C buffer isolates the capacitive loading of the source system from that of the sink and interconnecting cable. This isolation improves overall signal integrity of the system and allows for considerable design margin within the source system for DVI / HDMI compliance testing. -

A Guide to Making RF Measurements for Signal Integrity Applications
White Paper A Guide to Making RF Measurements for Signal Integrity Applications Introduction Designing a system for Signal Integrity requires a great deal of knowledge and tremendous effort from all disciplines involved. Higher data rates and more complex modulation schemes are requiring digital engineers to take into account the analog and RF performance of the channels to a much greater degree than in the past. Moreover, increasing performance demands are requiring digital engineers move from oscilloscopes and TDRs to vector network analyzers (VNAs), with which they may be less familiar. Correspondingly, RF measurement groups within companies are being called on by their digital colleagues to help them with making VNA measurements. This paper is intended to review signal integrity-based VNA measurements for digital engineers and correlate VNA measurements to key signal integrity parameters for RF engineers. Contents The Driving Need for RF Measurements ...........................................................................................................3 Understanding Signal Integrity Terms and Measurements ...........................................................................4 Eye Diagrams .................................................................................................................................................4 Dispersion .......................................................................................................................................................4 High Frequency Loss /Attenuation -
LVDS Application and Data Handbook
LVDS Application and Data Handbook High-Performance Linear Products Technical Staff Literature Number: SLLD009 November 2002 Printed on Recycled Paper IMPORTANT NOTICE Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements, and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment. TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where mandated by government requirements, testing of all parameters of each product is not necessarily performed. TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and applications using TI components. To minimize the risks associated with customer products and applications, customers should provide adequate design and operating safeguards. TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right, or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information published by TI regarding third–party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement thereof. -

Design and Performance Evaluation of QPSK Modulation And
International Conference on Applied Science and Engineering Innovation (ASEI 2015) Design and Performance Evaluation of QPSK Modulation and Demodulation in SS mode Based on Systemview Sheng LIANGa, Gaofeng PANb, Youxing WU, Yong XIEc China Satellite Maritime Tracking and Control Department, Jiangyin, Jiangsu, 214431,China a [email protected], b [email protected], c [email protected] Keywords: SS; QPSK; Eye Diagram. Abstract. Because the modulation and demodulation method in SS (Spread Spectrum) mode is different with sub-carrier TT&C system, so it is necessary to realize its performance evaluation based on software simulation. This paper makes use of Systemview to simulate the single target measurement in SS system and evaluate its anti-noise performance by eye diagram and BER. Results show the simulation model designed in this paper is feasible and Systemview can visualize abstract communication simulation. Introduction The present SS TT&C system has two kinds, which are coherent and non-coherent SS modes. In coherent mode, telecommand message is embedded in branch I of QPSK modulation after encoded with short PN code (period 210-1), distance measure message is embedded in branch Q after encoded with long PN code (period (210-1)×256) and the two branch signals with different powers compose UQPSK signal. In non-coherent mode, two branch messages encoded with short PN code are BPSK modulated respectively, which will be transmitted to the satellite after up-conversion and power amplification. This paper sets conditions to unitize the two modes and designs the modulation & demodulation simulation model based on Systemview to evaluate performance of SS mode. -

Serial ATA Interface
Serial ATA Interface Frank R. Chu Senior Engineer Hitachi Global Storage Technologies June 2003 Why do we need a new interface? Limitations of parallel ATA Serial ATA was designed to overcome a number of limitations of parallel ATA. The most significant limitation of parallel ATA is the difficulty in increasing the data rate beyond 100MB/s. Parallel ATA uses a single-ended signaling system that is prone to induced noise. Increasing the parallel data rate beyond 100 MB/s would require a new signaling system that would not be backward compatible with existing systems. Desktop HDDs can be expected to outrun the 100 Mbytes/sec data rate in the next few years so a new system is needed. An additional limitation is that parallel ATA uses 5V signaling levels and upcoming silicon microelectronic processes are not compatible with 5V signaling. Serial ATA overcomes these issues by moving to 250mV differential signaling method. Differential signaling rejects induced noise. The 250mV differential signal level is compatible with future microelectronic fabrication processes. Parallel ATA Topology Serial ATA Topology Parallel ATA Topology Serial ATA Topology Operating system Operating System Serial ATA ATA Application 1 Application 1 Standard Adapter adapter Disk Driver Application 2 Driver Application 2 Drive Disk Application 3 Disk Disk Application 3 Drive drive drive Forecasts Indicate ATA Dominance ATA is the dominant HDD interface in the industry. The ATA interface market is expected to be approximately 190 million units in 2003, accounting for about 90% of all HDDs shipped, according to International Data Corporations (IDC) 2002/03 forecasts. By 2006, IDC projects ATA unit shipments will increase to beyond 310 million and continue to account for 90% of all HDDs shipments. -
AN-808 Long Transmission Lines and Data Signal Quality
Application Report SNLA028–May 2004 AN-808 Long Transmission Lines and Data Signal Quality ..................................................................................................................................................... ABSTRACT This application note explores another important transmission line characteristic, the reflection coefficient. This concept is combined with the material in AN-806 to present graphical and analytical methods for determining the voltages and currents at any point on a line with respect to distance and time. The effects of various source resistances and line termination methods on the transmitted signal are also discussed. This application note is a revised reprint of section four of the Fairchild Line Driver and Receiver Handbook. This application note, the third of a three part series (See AN-806 and AN-807), covers the following topics: Contents 1 Overview ..................................................................................................................... 3 2 Introduction .................................................................................................................. 3 3 Factors Causing Signal Wave Shape Changes ......................................................................... 4 4 Influence of Loss Effects on Primary Line Parameters ................................................................ 5 5 Variations in Z0, α(ω), and Propagation Velocity ........................................................................ 6 6 Signal Quality—Terms .................................................................................................... -
Creating Eye Diagrams Using Vectorstar Snp Files and AWR
Application Note Creating Eye Diagrams using VectorStar™ SnP files and AWR Microwave Office® MS4640B Series Vector Network Analyzer 1 Introduction As data rates and design complexity continues to increase, signal integrity becomes an integral part of the design and verification process. At first glance, one might assume that because digital signals are represented by discrete voltage (or current) levels, signal integrity may not be of major concern to digital designers. However, digital signals are fundamentally analog in nature, and all signals are subject to effects such as noise, distortion, and loss. Over short distances and at low bit rates, a simple conductor can transmit digital signals reliably without much distortion, but at high bit rates and over longer distances or through various media, various effects can degrade the electrical signal to the point where errors occur and the system or device fails. Today, it is common to see devices and systems operating at multi-GHz data rates. Digital signals being transmitted over relatively long transmission lines or through differing materials also present signal integrity challenges. Because of these challenges, a host of variables can affect the integrity of signals, including transmission-line effects, impedance mismatches, signal routing, termination schemes, and grounding schemes. One tool used to characterize these effects is the eye diagram. With eye diagrams, engineers can quickly evaluate system performance and gain insight into the nature of channel imperfections that can lead to errors when a receiver tries to interpret the value of a transmitted data bit. This application note reviews basic eye diagram definitions and terminologies. It will include a measurement example showing how to import a S-Paramater File of a device measured by an Anritsu VectorStar VNA into AWR’s Microwave Office application to generate an Eye Diagram. -
FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection
FUSB1500 / FUSB1501 — USB2.0 Full-Speed April 2011 FUSB1500 — USB2.0 Full-Speed / Low-Speed Transceiver with Charger Detection Features Description . Complies with USB2.0 Specification The FUSB1500 is a USB2.0 FS/LS transceiver with resistive charger detection. It is compliant with the . Supports 12Mbps and 1.5Mbps USB2.0 Speeds Universal Serial Bus Specification, Rev. 2.0 (USB2.0). - Single Ended (SE) Mode Signaling Ideal for portable electronic devices; such as mobile - Slew-Rate Controlled Differential Data Driver phones, digital still cameras, and personal digital - Differential Input Receiver with Wide Common- assistants; it allows USB Application Specific ICs Mode Range and High Input Sensitivity (ASICs) and Programmable Logic Devices (PLDs) with Low-Speed Transceiver with Charger Detection - Stable RCV Output during SE0 Condition power supply voltages from 1.65V to 3.6V to interface with the physical layer of the Universal Serial Bus. - Two Single-Ended Receivers with Hysteresis The FUSB1500 can be used as a USB device Supports I/O Voltage: 1.65V to 3.6V . transceiver or a USB host transceiver. It can transmit and receive serial data at both full-speed (12Mbps) and Applications low-speed (1.5Mbps) data rates. The FUSB1500 supports the SE Mode controller . Dual-Camera Applications for Cell Phones interface. Dual-LCD Applications for Cell Phones, Digital Camera Displays, and Viewfinders IMPORTANT NOTE: For additional performance information, please contact [email protected]. Ordering Information Operating Top Packing Part Number Temperature Package Mark Method Range FUSB 16-Pin, Molded Leadless Package (MLP), FUSB1500MHX -40 to +85°C Tape and Reel 1500 JEDEC MO217 Equivalent, 3mm Square © 2008 Fairchild Semiconductor Corporation www.fairchildsemi.com FUSB1500 • Rev. -

Enabling Precision EYE Pattern Analysis Extinction Ratio, Jitter, Mask Margin
Technical Note Enabling Precision EYE Pattern Analysis Extinction Ratio, Jitter, Mask Margin MP2100A Series BERTWave Contents 1 Introduction ..................................................................................................................................................... 2 2 EYE Pattern Fundamentals............................................................................................................................. 3 2.1 Analyzing EYE Pattern.................................................................................................................................... 3 2.2 Amplitude Definitions for Vertical Eye Patterns ............................................................................................... 4 2.3 Time Definitions for Horizontal EYE Pattern.................................................................................................... 4 3. Main Measurement Items for EYE Pattern Analysis........................................................................................ 5 3.1 Extinction Ratio ............................................................................................................................................... 5 3.2 Jitter (RMS, Peak-to-Peak) ............................................................................................................................. 5 3.3 Compliance Mask Test .................................................................................................................................... 6 3.4 Mask Margin Test ...........................................................................................................................................