Implementation and Assessment of a Model-Based Controller of Torque and Nitrogen Oxide Emissions in an 11 L Heavy-Duty Diesel Engine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Diesel and Fuel-Oil Engines
HdiiUiiat uuioTAt* VI i nPicrence moK not to do AUG 2 ^ : , CuKCH JlUili lilO L, iDi slil CS102E-42 Jf' Engines, Diese! and fuei-oil (export classifications) U. S. DEPARTMENT OF COMMERCE JESSE H. JONES, Secretary NATIONAL BUREAU OF STANDARDS LYMAN J. BRIGGS, Director DIESEL AND FUEL-OIL ENGINES (Export Classifications) COMMERCIAL STANDARD CS102E-42 Effective Date for New Production from October 30, 1942 A RECORDED VOLUNTARY STANDARD OF THE TRADE UNITED STATES GOVERNMENT PRINTING OFFICE WASHINGTON : 1942 For sale by the Superintendent of Documents, Washington, D. C. Price 10 cents . U. S. Department of Commerce National Bureau of Standard? PROMULGATION of COMMERCIAL STANDARD CS102E-42 for DIESEL AND FUEL-OIL ENGINES (Export Classifications) On January 30, 1942, at the instance of the Diesel Engine Manu- facturers’ Association, a conference of representative manufacturers adopted a recommended commercial standard for Diesel and fuel -oil engines (export classifications). Those concerned have since accepted and approved the standard as shown herein for promulgation by the U. S. Department of Commerce, through the National Bureau of Standards. The standard is effective for new production from October 30, 1942. Promulgation recommended I. J. Fairchild, Chieff Division of Trade Standards, Promulgated. Lyman J. Briggs, Director^ National Bureau of Standards, Promulgation approved. Jesse H. Jones, Secretary of Commerce. II DIESEL AND FUEL-OIL ENGINES (Export Classifications) COMMERCIAL STANDARD CS102E-42 PARTS Page 1. Nomenclature and definitions.. ' 1 2. Slow- and medium-speed stationary Diesel engines 7 3. Slow- and medium-speed marine Diesel engines 13 4. Small, medium- and high-speed stationary, marine, and portable Diesel engines 19 5. -

! National Advisory Committee for Aeronautics
! . \ i NATIONAL ADVISORY COMMITTEE FOR AERONAUTICS TECHNICAL NOTE No. 1374 EXPERIMENTAL STUDIES OF THE KNOCK - LIlvITTED BLENDIDG CHARACTERISTICS OF AVIATION FUELS II - INVESTIGATION OF LEADED PARAFFINIC FUELS IN AN AIR-COOLED CYLrnDER By Jerrold D. Wear and Newell D. Sanders Flight Propulsion Research Laboratory Cleveland, Ohio Washington July 1947 , \ I NATIONAL ADVISORY COMMITTEE FOR AERONAUTICS TN 1374 EXPERIMENTAL STUDIES OF THE KNOCK-LIMITED BLENDING CH.~~ACTERISTICS OF AVIATION FUELS II - INVESTIGATION OF LEADED PARAFFINIC FUELS IN ~~ AIR-COOLED CYLINDER By Jerrold D. Wear and. Newell D. Sanders SUMMARY The relation between knock limit and blend composition of selected aviation fuel components individually blended with virgin base and ''lith alkylate was determined in a full-scale air-cooled aircraft-·engine cylinder. In addition the follow ing correlations were examined: (a) The knock-·limited performance of a full -scale engine at lean-mixture operation plotted against the knock-limited perform ance of the engine at rich-mixture operation for a series of fuels (b) The knock-limited performance of a full-scale engine at rich-mixture operation plotted against the knock-limited perform ance at rich-mixture operation of a small-scale engine for a series of fuels In each case the following methods of specifying the knock limi ted perfOl'IDanCe of the engine were investigated: (l) Knock·-limited indicated mean effective pressure (2) percentage of S-4 plus 4 ml T~~ per gallon in M-4 plus 4 ml TEL per gallon to give an equal knock-limited indicated mean effective pressure (3) Ratio of indicated mean effective pressure of test fuel ~o indicated mean effective pressure of clear S-4 reference fuel, all other conditions being the same . -

An Experimental Study on Performance and Emission Characteristics of a Hydrogen Fuelled Spark Ignition Engine
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by DSpace@IZTECH Institutional Repository International Journal of Hydrogen Energy 32 (2007) 2066–2072 www.elsevier.com/locate/ijhydene An experimental study on performance and emission characteristics of a hydrogen fuelled spark ignition engine Erol Kahramana, S. Cihangir Ozcanlıb, Baris Ozerdemb,∗ aProgram of Energy Engineering, Izmir Institute of Technology, Urla, Izmir 35430, Turkey bDepartment of Mechanical Engineering, Izmir Institute of Technology, Urla, Izmir 35430, Turkey Received 2 August 2006; accepted 2 August 2006 Available online 2 October 2006 Abstract In the present paper, the performance and emission characteristics of a conventional four cylinder spark ignition (SI) engine operated on hydrogen and gasoline are investigated experimentally. The compressed hydrogen at 20 MPa has been introduced to the engine adopted to operate on gaseous hydrogen by external mixing. Two regulators have been used to drop the pressure first to 300 kPa, then to atmospheric pressure. The variations of torque, power, brake thermal efficiency, brake mean effective pressure, exhaust gas temperature, and emissions of NOx, CO, CO2, HC, and O2 versus engine speed are compared for a carbureted SI engine operating on gasoline and hydrogen. Energy analysis also has studied for comparison purpose. The test results have been demonstrated that power loss occurs at low speed hydrogen operation whereas high speed characteristics compete well with gasoline operation. Fast burning characteristics of hydrogen have permitted high speed engine operation. Less heat loss has occurred for hydrogen than gasoline. NOx emission of hydrogen fuelled engine is about 10 times lower than gasoline fuelled engine. -

Artificial Intelligence for the Prediction of Exhaust Back Pressure Effect On
applied sciences Article Artificial Intelligence for the Prediction of Exhaust Back Pressure Effect on the Performance of Diesel Engines Vlad Fernoaga 1 , Venetia Sandu 2,* and Titus Balan 1 1 Faculty of Electrical Engineering and Computer Science, Transilvania University, Brasov 500036, Romania; [email protected] (V.F.); [email protected] (T.B.) 2 Faculty of Mechanical Engineering, Transilvania University, Brasov 500036, Romania * Correspondence: [email protected]; Tel.: +40-268-474761 Received: 11 September 2020; Accepted: 15 October 2020; Published: 21 October 2020 Featured Application: This paper presents solutions for smart devices with embedded artificial intelligence dedicated to vehicular applications. Virtual sensors based on neural networks or regressors provide real-time predictions on diesel engine power loss caused by increased exhaust back pressure. Abstract: The actual trade-off among engine emissions and performance requires detailed investigations into exhaust system configurations. Correlations among engine data acquired by sensors are susceptible to artificial intelligence (AI)-driven performance assessment. The influence of exhaust back pressure (EBP) on engine performance, mainly on effective power, was investigated on a turbocharged diesel engine tested on an instrumented dynamometric test-bench. The EBP was externally applied at steady state operation modes defined by speed and load. A complete dataset was collected to supply the statistical analysis and machine learning phases—the training and testing of all the AI solutions developed in order to predict the effective power. By extending the cloud-/edge-computing model with the cloud AI/edge AI paradigm, comprehensive research was conducted on the algorithms and software frameworks most suited to vehicular smart devices. -

Napier Sabre Engines Will Be Found on Page L75
STAITDARDIZRD DATA PAGES FOR RECIPROCATIITG EITCTI\ES Standardized data pages are used to present the specifieations of the basic aircraft engines and airhorne auxiliary units described and illustrated in the followirg section of the book. The arrangeme'nt of the data on the standardi zed" data pages is as f ollows : First, there is a concise description of the engine, its construe tion and the major accessories with which it is equipped. Then, in tabular form, there are items such as bore, stroke, displacement (swept vol- ume), compression ratio, overall dimensions, frontal areae total weight and weight per maximum horsepolyer. F'uel and lubricating oiX eonsumptions at cruising output are given in units of weight. The fuel grade and the viscosity of the lubricating oil at 210o F" (100o C) also are specified. Efficiency figures such as maximum power output per unit of dis- placement, maximum polver output per unit of piston area) maximum piston speed and maximum brake mean effective pressure have been ealculated for comparative purposes. Finally, the various horsepower ratings of the engine are given, such as; Take-off rating, or the maxinrum horsepower which it is per- missibil to ,ruJ at sea level and at low altitrdes. flrlilitary (combat) rating, or the maximum horsepower which it is perrnissib]e to use for military purposes at various alti- tudes. fVorrual rating,, or the ntaximum horsepower which the engine can deliver continuously for climh without undue stress" Cruising ratirug, or the maximum horsepo\,ver recommended for continuous operation consistent with reasonable fuel econ- omy. Ern,ergerlcy rating, or the marximum horsepower which it is permissible use a _ to for short period of time in an ernergency. -

Effect of Various Ignition Timings on Combustion Process and Performance of Gasoline Engine
ACTA UNIVERSITATIS AGRICULTURAE ET SILVICULTURAE MENDELIANAE BRUNENSIS Volume 65 58 Number 2, 2017 https://doi.org/10.11118/actaun201765020545 EFFECT OF VARIOUS IGNITION TIMINGS ON COMBUSTION PROCESS AND PERFORMANCE OF GASOLINE ENGINE Lukas Tunka1, Adam Polcar1 Department of Technology and Automobile Transport, Faculty of AgriSciences, Mendel University in Brno, Zemědělská 1, 613 00 Brno, Czech Republic Abstract TUNKA LUKAS, POLCAR ADAM. 2017. Effect of Various Ignition Timings on Combustion Process and Performance of Gasoline Engine. Acta Universitatis Agriculturae et Silviculturae Mendelianae Brunensis, 65(2): 545–554. This article deals with the effect of the ignition timing on the output parameters of a spark-ignition engine. The main assessed parameters include the output parameters of the engine (engine power and torque), cylinder pressure variation, heat generation and burn rate. However, the article also discusses the effect of the ignition timing on the temperature of exhaust gases, the indicated mean effective pressure, the combustion duration, combustion stability, etc. All measurements were performed in an engine test room in the Department of Technology and Automobile Transport at Mendel University in Brno, on a four-cylinder AUDI engine with a maximum power of 110 kW, as indicated by the manufacturer. To control and change the ignition timing of the engine, a fully programmable Magneti Marelli control unit was used. The experimental measurements were performed on 8 different ignition timings, from 18 °CA to 32 °CA BTDC at wide throttle open and a constant engine speed (2500 rpm), with a stoichiometric mixture fraction. The measurement results showed that as the ignition timing increases, the engine power and torque also increase. -

Washington, 0. C. Washington Sept Ember 1942 J •
TECHNICAL NOTES NA~lONAL ADVISORY COMMITTEE FOR AERONAUTICS No . 861 TEE EFFECT OF VALVE COOLING UPO N MAXIMUM PERMISSIBLE ENGINE OUTFUT AS LIMITED BY KNOCK ]y Mauri ce Munger, H. D. Wilsted, and B. A. Mu lcahy Langley Me morial Aeronauti cal Laboratory Langl ey Field, Va. COpy To be returned to t files of the Nati nil Advisory Commi rt for Aeronautics Washington, 0. C. Washington Sept ember 1942 J • ·' NATIONAL ADVISORY CO MMITTEE FOR AERO NAUTICS TECHNICAL NOTE NO. 861 THE EFFECT OF VALVE COOLING UPON MAXIMUM PERMISSIBLE ENGINE OUTPUT AS LIMITED BY KNOCK By Maurice Mun g er. H. D. Wi1sted, and B. A. Mulcahy SUMMARY A Wri g ht GR-1820-G200 cylinder was tested over a wide r ange of fUel-air ratios at maximum permissible p ower o u t put as limited by knock with three different deg rees of valve cooling . The valves used were stock valves (solid i n let valve and hollow sodium-cooled ex h a u s t v a lve), hollo valves with n o coolant, and hollow valves with flo wing wat e r as a coolant. Curves s h owing t he variat i on in ma x i mu m p e r missi1 1 e v a lues of inlet air p r e ssu r e , i nd icated mean e f f e c t iv e p r e ssu re, cylin d e r c har g e, and indicat e d specific fu e l co n s umption wit h c hang e in fuel- a ir r a tio and val v e cooling are s h own . -
Aircraft Piston Engine Operation Principles and Theory
Lect-25 Aircraft Piston Engine Operation Principles and Theory 1 Prof. Bhaskar Roy, Prof. A M Pradeep, Department of Aerospace, IIT Bombay Lect-25 How an IC engine operates-1 • Each piston is inside a cylinder, into which a gas is created -- heated inside the cylinder by ignition of a fuel air mixture at high pressure (internal combustion engine). • The hot, high pressure gases expand, pushing the piston to the bottom of the cylinder (BDC) creating Power stroke. 2 Prof. Bhaskar Roy, Prof. A M Pradeep, Department of Aerospace, IIT Bombay Lect-25 How an IC engine operates-2 •The piston is returned to the cylinder top (Top Dead Centre) either by a flywheel or the power from other pistons connected to the same shaft. • In most types the "exhausted" gases are removed from the cylinder by this stroke. • This completes the four strokes of a 4-stroke engine also representing 4 legs of a cycle 3 Prof. Bhaskar Roy, Prof. A M Pradeep, Department of Aerospace, IIT Bombay Lect-25 How an IC engine operates-3 • The linear motion of the piston is converted to a rotational motion via a connecting rod and a crankshaft. • A flywheel is used to ensure continued smooth rotation (i.e. when there is no power stroke). Multiple cylinder power strokes act as a flywheel. 4 Prof. Bhaskar Roy, Prof. A M Pradeep, Department of Aerospace, IIT Bombay Lect-25 How an IC engine operates-4 •The more cylinders a reciprocating engine has, generally, the more vibration-free (smoothly) it can operate. •The aggregate power of a reciprocating engine is proportional to the volume of the combined pistons' displacement. -

Alcohol Fuels for Spark-Ignition Engines
Special issue article Proc IMechE Part D: J Automobile Engineering 2018, Vol. 232(1) 36–56 Alcohol fuels for spark-ignition engines: Ó IMechE 2018 Reprints and permissions: sagepub.co.uk/journalsPermissions.nav Performance, efficiency and emission DOI: 10.1177/0954407017752832 effects at mid to high blend rates for journals.sagepub.com/home/pid binary mixtures and pure components James WG Turner1, Andrew GJ Lewis1, Sam Akehurst1,ChrisJBrace1, Sebastian Verhelst2 , Jeroen Vancoillie2, Louis Sileghem2, Felix Leach3 and Peter P Edwards3 Abstract The paper evaluates the results of tests performed using mid- and high-level blends of the low-carbon alcohols, methanol and ethanol, in admixture with gasoline, conducted in a variety of test engines to investigate octane response, efficiency and exhaust emissions, including those for particulate matter. In addition, pure alcohols are tested in two of the engines, to show the maximum response that can be expected in terms of knock limit and efficiency as a result of the beneficial properties of the two alcohols investigated. All of the test work has been conducted with blending of the alcohols and gasoline taking place outside the combustion system, that is, the two components are mixed homogeneously before introduction to the fuel system, and so the results represent what would happen if the alcohols were introduced into the fuel pool through a conventional single-fuel-pump (dispenser) approach. While much has been written on the effect of blending the light alcohols with gasoline in this way, the results present significant new findings with regard to the effect of the enthalpy of vaporization of the alcohols in terms of particulate exhaust emissions. -

Effect of Spark Advance and Fuel on Knocking Tendency of Spark Ignited Engine
Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports 2017 Effect of spark advance and fuel on knocking tendency of spark ignited engine Abhay S. Joshi Michigan Technological University, [email protected] Copyright 2017 Abhay S. Joshi Recommended Citation Joshi, Abhay S., "Effect of spark advance and fuel on knocking tendency of spark ignited engine", Open Access Master's Report, Michigan Technological University, 2017. https://doi.org/10.37099/mtu.dc.etdr/511 Follow this and additional works at: https://digitalcommons.mtu.edu/etdr Part of the Automotive Engineering Commons, and the Heat Transfer, Combustion Commons EFFECT OF SPARK ADVANCE AND FUEL ON KNOCKING TENDENCY OF SPARK IGNITED ENGINE By Abhay S Joshi A REPORT Submitted in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE In Mechanical Engineering MICHIGAN TECHNOLOGICAL UNIVERSITY 2017 © 2017 Abhay S Joshi This report has been approved in partial fulfillment of the requirements for the Degree of MASTER OF SCIENCE in Mechanical Engineering. Department of Mechanical Engineering – Engineering Mechanics Report Advisor: Dr. Scott A. Miers Committee Member: Mr. Jeremy J. Worm Committee Member: Dr. David D. Wanless Department Chair: Dr. William W. Predebon ACKNOWLEDGMENTS I will like to thank Dr. Scott Miers for the encouragement, support and guidance during the entire duration of this study. I will like to thank my committee member Prof. Worm and Dr. Wanless for taking the time out of their schedule to review my report. I will also like to thank Behdad Afkhami for helping and guiding me whenever needed. Also, an acknowledgment is given to the support of this study from the faculty and staff of the Department of Mechanical Engineering and Engineering Mechanics for their support. -
B-24 Manual Part 3
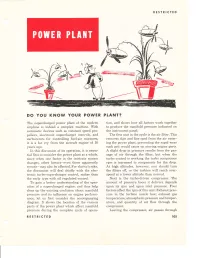
RESTRICTED DO YOU KNOW YOUR POWER PTANT? The supercharged power plant of the modern tion, and shows how all factors work together airplane is indeed a complex machine. With to produce the manifold pressure indicated on automatic devices such as constant speed pro- the instrument panel. pellers, electronic supercharger controls, and The first unit in the cycle is the air filter. This carburetors for controlling fuel-air mixtures, removes dust and fine sand from the air enter- it is a far cry from the aircraft engine of 20 ing the power plant, preventing the rapid wear years ago. such grit would cause on moving engine parts. In this discussion of its operation, it is essen- A slight drop in pressure results from the pas- tial first to consider the power plant as a whole, sage of air through the filter, but rvhen the since when one factor in the intricate system turbo control is working the turbo compressor changes, other factors-even those apparently rpm is increased to cornpensate for the drop. remote-may also be afiected. For clarity's sake, At high altitudes, however, you should trrrn the discussion will deal chiefly with the elec- the filters off, or the turbine will reach over- tronic turbo-supercharger control, rather than speed at a lower altitude than normal. the early type with oil regulated control. Next is the turbo-driven compressor. The To gain a better understanding of the oper- amount of pressure boost it delivers depends ation of a supercharged engine, and thus help upon its rpm and upon inlet pressure. -

Internal Combustion Engine
AccessScience from McGraw-Hill Education Page 1 of 15 www.accessscience.com Internal combustion engine Contributed by: Neil MacCoull, Donald L. Anglin Publication year: 2014 A prime mover that burns fuel inside the engine, in contrast to an external combustion engine, such as a steam engine, which burns fuel in a separate furnace. See also: ENGINE . Most internal combustion engines are spark-ignition gasoline-fueled piston engines. These are used in automobiles, light- and medium-duty trucks, motorcycles, motorboats, lawn and garden equipment, and light industrial and portable power applications. Diesel engines are used in automobiles, trucks, buses, tractors, earthmoving equipment, as well as marine, power-generating, and heavier industrial and stationary applications. This article describes these types of engines. For other types of internal combustion engines see GAS TURBINE ; ROCKET PROPULSION ; TURBINE PROPULSION . The aircraft piston engine is fundamentally the same as that used in automobiles but is engineered for light weight and is usually air-cooled. See also: RECIPROCATING AIRCRAFT ENGINE . Engine types Characteristics common to all commercially successful internal combustion engines include (1) the compression of air, (2) the raising of air temperature by the combustion of fuel in this air at its elevated pressure, (3) the extraction of work from the heated air by expansion to the initial pressure, and (4) exhaust. Four-stroke cyc le. William Barnett first drew attention to the theoretical advantages of combustion under compression in 1838. In 1862 Beau de Rochas published a treatise that emphasized the value of combustion under pressure and a high ratio of expansion for fuel economy; he proposed the four-stroke engine cycle as a means of accomplishing these conditions in a piston engine ( Fig.