Remotely Operated Vehicle “ROV PHOCA“
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
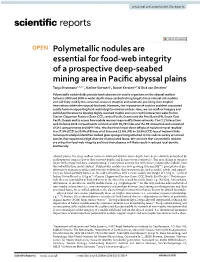
Polymetallic Nodules Are Essential for Food-Web Integrity of a Prospective Deep-Seabed Mining Area in Pacific Abyssal Plains
www.nature.com/scientificreports OPEN Polymetallic nodules are essential for food‑web integrity of a prospective deep‑seabed mining area in Pacifc abyssal plains Tanja Stratmann1,2,3*, Karline Soetaert1, Daniel Kersken4,5 & Dick van Oevelen1 Polymetallic nodule felds provide hard substrate for sessile organisms on the abyssal seafoor between 3000 and 6000 m water depth. Deep‑seabed mining targets these mineral‑rich nodules and will likely modify the consumer‑resource (trophic) and substrate‑providing (non‑trophic) interactions within the abyssal food web. However, the importance of nodules and their associated sessile fauna in supporting food‑web integrity remains unclear. Here, we use seafoor imagery and published literature to develop highly‑resolved trophic and non‑trophic interaction webs for the Clarion‑Clipperton Fracture Zone (CCZ, central Pacifc Ocean) and the Peru Basin (PB, South‑East Pacifc Ocean) and to assess how nodule removal may modify these networks. The CCZ interaction web included 1028 compartments connected with 59,793 links and the PB interaction web consisted of 342 compartments and 8044 links. We show that knock‑down efects of nodule removal resulted in a 17.9% (CCZ) to 20.8% (PB) loss of all taxa and 22.8% (PB) to 30.6% (CCZ) loss of network links. Subsequent analysis identifed stalked glass sponges living attached to the nodules as key structural species that supported a high diversity of associated fauna. We conclude that polymetallic nodules are critical for food‑web integrity and that their absence will likely result in reduced local benthic biodiversity. Abyssal plains, the deep seafoor between 3000 and 6000 m water depth, have been relatively untouched by anthropogenic impacts due to their extreme depths and distance from continents 1. -

Rov Kiel 6000“
Journal of large-scale research facilities, 3, A117 (2017) http://dx.doi.org/10.17815/jlsrf-3-160 Published: 23.08.2017 Remotely Operated Vehicle “ROV KIEL 6000“ GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel * Facilities Coordinators: - Dr. Friedrich Abegg, GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel, Germany, phone: +49(0) 431 600 2134, email: [email protected] - Dr. Peter Linke, GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel, Germany, phone: +49(0) 431 600 2115, email: [email protected] Abstract: The remotely operated vehicle ROV KIEL 6000 is a deep diving platform rated for water depths of 6000 meters. It is linked to a surface vessel via an umbilical cable transmitting power (copper wires) and data (3 single-mode glass bers). As standard it comes equipped with still and video cameras and two dierent manipulators providing eyes and hands in the deep. Besides this a set of other tools may be added depending on the mission tasks, ranging from simple manipulative tools such as chisels and shovels to electrically connected instruments which can send in-situ data to the ship through the ROVs network, allowing immediate decisions upon manipulation or sampling strategies. 1 Introduction ROV KIEL 6000 was manufactured by FMCTI / Schilling Robotics LLC (CA/USA) and was delivered to GEOMAR, Kiel in 2007. Funding came from the German state of Schleswig-Holstein, whose capital city Kiel provided the name. The ROV was designed and built to specications which aimed at a balance between system weight, capabilities of the supporting research vessels and the scientic demands. It is one of the most versatile ROV systems world-wide, rated for 6000 m water depth, reaching approx. -

Environmental Assessment
PROPOSED ACTION: Issuance of an Incidental Harassment Authorization to the United States Geological Service to Take Marine Mammals by Harassment Incidental to a Marine Geophysical Survey in the Northwest Atlantic Ocean TYPE OF STATEMENT: Environmental Assessment LEAD AGENCY: U.S. Department of Commerce National Oceanic and Atmospheric Administration National Marine Fisheries Service RESPONSIBLE OFFICIAL: Donna S. Wieting, Director, Office of Protected Resources, National Marine Fisheries Service FOR FURTHER INFORMATION: Jonathan Molineaux National Marine Fisheries Service Office of Protected Resources Permits and Conservation Division 1315 East West Highway Silver Spring, MD 20910 301-427-8401 LOCATION: Northwest Atlantic Ocean ABSTRACT: This Environmental Assessment analyzes the environmental impacts of the National Marine Fisheries Service, Office of Protected Resources proposals to issue an Incidental Harassment Authorization (IHA) to the United States Geological Service by Level B harassment of small numbers of marine mammals incidental to a marine geophysical survey in the northwest Atlantic Ocean. The IHA would be valid from August 8, 2018 through August 7, 2019. DATE: July 2018 TABLE OF CONTENTS Chapter 1 Introduction and Purpose and Need ................................................................................. 4 1.1. Background ................................................................................................................................... 4 1.2. Applicant’s Incidental Take Authorization Request .................................................................... -

Download-The-Data (Accessed on 12 July 2021))
diversity Article Integrative Taxonomy of New Zealand Stenopodidea (Crustacea: Decapoda) with New Species and Records for the Region Kareen E. Schnabel 1,* , Qi Kou 2,3 and Peng Xu 4 1 Coasts and Oceans Centre, National Institute of Water & Atmospheric Research, Private Bag 14901 Kilbirnie, Wellington 6241, New Zealand 2 Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; [email protected] 3 College of Marine Science, University of Chinese Academy of Sciences, Beijing 100049, China 4 Key Laboratory of Marine Ecosystem Dynamics, Second Institute of Oceanography, Ministry of Natural Resources, Hangzhou 310012, China; [email protected] * Correspondence: [email protected]; Tel.: +64-4-386-0862 Abstract: The New Zealand fauna of the crustacean infraorder Stenopodidea, the coral and sponge shrimps, is reviewed using both classical taxonomic and molecular tools. In addition to the three species so far recorded in the region, we report Spongicola goyi for the first time, and formally describe three new species of Spongicolidae. Following the morphological review and DNA sequencing of type specimens, we propose the synonymy of Spongiocaris yaldwyni with S. neocaledonensis and review a proposed broad Indo-West Pacific distribution range of Spongicoloides novaezelandiae. New records for the latter at nearly 54◦ South on the Macquarie Ridge provide the southernmost record for stenopodidean shrimp known to date. Citation: Schnabel, K.E.; Kou, Q.; Xu, Keywords: sponge shrimp; coral cleaner shrimp; taxonomy; cytochrome oxidase 1; 16S ribosomal P. Integrative Taxonomy of New RNA; association; southwest Pacific Ocean Zealand Stenopodidea (Crustacea: Decapoda) with New Species and Records for the Region. -

Vision-Based Shipwreck Mapping: on Evaluating Features Quality and Open Source State Estimation Packages
Vision-Based Shipwreck Mapping: on Evaluating Features Quality and Open Source State Estimation Packages A. Quattrini Li, A. Coskun, S. M. Doherty, S. Ghasemlou, A. S. Jagtap, M. Modasshir, S. Rahman, A. Singh, M. Xanthidis, J. M. O’Kane and I. Rekleitis Computer Science and Engineering Department, University of South Carolina Email: [albertoq,yiannisr,jokane]@cse.sc.edu, [acoskun,dohertsm,sherving,ajagtap,modasshm,srahman,akanksha,mariosx]@email.sc.edu Abstract—Historical shipwrecks are important for many rea- sons, including historical, touristic, and environmental. Cur- rently, limited efforts for constructing accurate models are performed by divers that need to take measurements manually using a grid and measuring tape, or using handheld sensors. A commercial product, Google Street View1, contains underwater panoramas from select location around the planet including a few shipwrecks, such as the SS Antilla in Aruba and the Yongala at the Great Barrier Reef. However, these panoramas contain no geometric information and thus there are no 3D representations available of these wrecks. This paper provides, first, an evaluation of visual features quality in datasets that span from indoor to underwater ones. Second, by testing some open-source vision-based state estimation packages on different shipwreck datasets, insights on open chal- Fig. 1. Aqua robot at the Pamir shipwreck, Barbados. lenges for shipwrecks mapping are shown. Some good practices for replicable results are also discussed. demonstrations. However, applying any of these packages on a I. INTRODUCTION new dataset has been proven extremely challenging, because Historical shipwrecks tell an important part of history and of two main factors: software engineering challenges, such at the same time have a special allure for most humans, as as lack of documentation, compilation, dependencies; and exemplified by the plethora of movies and artworks of the algorithmic limitations—e.g., special initialization motions for Titanic. -

Future Ocean Report Scientific Advisory Board Meeting
FUTURE OCEAN REPORT Scientific Advisory Board Meeting 24th – 25th September 2013 Steigenberger Conti-Hansa Schloßgarten 7, 24103 Kiel, Germany | 1 2 | Future Ocean Report | Editorial DEAR FUTURE OCEAN ADVISORY BOARD MEMBERS, We are very happy to welcome you to the upcoming meeting of the Scientific Advisory Board on September 24 and 25, 2013 in Kiel and are looking forward to discussing ongoing progress and future strategies of “The Future Ocean” cluster with you. In this document we have strived to compile ongoing and envisioned future activities of the Future Ocean. Although we have tried to keep this document short and focused in order to allow you to read through everything that happened, we have failed to keep it the volume we had envisioned – there is just too much going on. We ne- vertheless hope that you will be able to read through some of our activities, share your ideas and suggestions with us, and maybe get some inspiration for your own activities. In this way we hope to experience a mutually interesting meeting for all of us in September in Kiel. We sincerely look forward to your visit. Yours, Martin Visbeck and Ralph Schneider Editorial | 3 Editorial 02 Introduction 06 RESEARCH TOPICS R1 Our Common Future Ocean 08 R2 Ocean Governance 12 R3 Ocean Resources 15 R4 Ocean Innovation 19 R5 Ocean Sinks 23 R6 Dangerous Ocean 27 R7 Ocean Interfaces 30 R8 Evolving Ocean 33 R9 Ocean Controls 36 R10 Ocean Observations 39 R11 Predicted Ocean 42 4 | Future Ocean Report | Content CENTRAL SERVICES S1 Internationalization 46 S2 Knowledge -

Atlantic Ridge (5°S - 11°S) (MAR-SÜD V)
Mid-Atlantic Expedition 2009 FS METEOR Cruise No. 78, Leg 2 Mantle to ocean on the southern Mid- Atlantic Ridge (5°S - 11°S) (MAR-SÜD V) 02.04.2009 Port of Spain – 11.05.2009 Rio de Janeiro SPP 1144: “From Mantle to Ocean: Energy, Material and Life Cycles at Spreading Axes”. SPP 1144 Cruise Report M78/2 June 2009 Content Page 2.1 Participants 3 2.2 Research Program 5 2.3 Narrative of the Cruise 7 2.4 Preliminary Results 13 2.4.1 ROV Kiel 6000 Deployments 13 2.4.2 AUV-Dives 15 2.4.3 Geological Observations and Sampling 21 2.4.4 Physical Oceanography 37 2.4.5 Fluid Chemistry 44 2.4.6 Gases in Hydrothermal Fluids and Plumes 48 2.4.7 Microbial Ecology 52 2.4.8. Hydrothermal Symbioses 56 2.4.9 Volatile Organohalogens 59 2.4.10 Temperature Measurements of Hydrothermal Fluids 64 2.5. Journey Course and Weather 67 2.6 References 69 2.7 Acknowledgments 70 Appendix A 2.1 Stationlist A 1 A 2.2 ROV Station Protocols A 4 A 2.3 Rock Sampling Protocol M78/2: Inside Corner High at 5°S A 56 A 2.4 Fluid Chemistry A 64 A 2.5 Gas Chemistry A 72 A 2.6 Microbiology A 74 A 2.7 Animals Collected During M 78/2 for Symbioses Research A 81 A 2.8 Temperature Measurements of Hydrothermal Fluids A 83 2 / 70 SPP 1144 Cruise Report M78/2 June 2009 2.1 Participants Leg M 78/2 1. -

Algemene Directie Material Resources Divisie Overheidsopdrachten
Brussel, de … MRMP-N/P 17-… Pagina’s: 31 (… Bijl) Algemene Directie Material Resources Divisie Overheidsopdrachten BESTEK MRMP-N/P Nr 17NP002 betreffende de verwerving van een nieuw oceanografisch onderzoeksschip (Research Vessel) voor de Programmatorische Overheidsdienst Wetenschapsbeleid opgesteld op basis van de Wet van 15 juni 2006 (inzake klassieke sectoren) Correspondent: Mark ARNALSTEEN Algemene Directie Material Resources Fregatkapitein Militair Administrateur Divisie Overheidsopdrachten Tel: +32(0)2/44.15432 Sectie Naval Systems Fax: +32(0)2/44.39427 Ondersectie Programma’s E-mail: [email protected] Kwartier Koningin ELISABETH Eversestraat 1 1140 BRUSSEL BELGIË BESTEK MRMP-N/P Nr 17NP002 Pagina 2 Inhoudstafel 0. Gebruikte afkortingen ............................................................................................................ 5 1. Bijzondere bepalingen betreffende de uitvoering van de opdracht ................................... 6 a. Afwijkingen van de algemene uitvoeringsregels (KB2) ...................................................................... 6 b. Andersluidende bepalingen betreffende de toepassing van het KB1 ................................................ 6 2. De overheidsopdracht ........................................................................................................... 6 a. Toepasselijke wetgeving .................................................................................................................... 6 b. Op deze overheidsopdracht toepasselijke opdrachtdocumenten -

ASFIS ISSCAAP Fish List February 2007 Sorted on Scientific Name
ASFIS ISSCAAP Fish List Sorted on Scientific Name February 2007 Scientific name English Name French name Spanish Name Code Abalistes stellaris (Bloch & Schneider 1801) Starry triggerfish AJS Abbottina rivularis (Basilewsky 1855) Chinese false gudgeon ABB Ablabys binotatus (Peters 1855) Redskinfish ABW Ablennes hians (Valenciennes 1846) Flat needlefish Orphie plate Agujón sable BAF Aborichthys elongatus Hora 1921 ABE Abralia andamanika Goodrich 1898 BLK Abralia veranyi (Rüppell 1844) Verany's enope squid Encornet de Verany Enoploluria de Verany BLJ Abraliopsis pfefferi (Verany 1837) Pfeffer's enope squid Encornet de Pfeffer Enoploluria de Pfeffer BJF Abramis brama (Linnaeus 1758) Freshwater bream Brème d'eau douce Brema común FBM Abramis spp Freshwater breams nei Brèmes d'eau douce nca Bremas nep FBR Abramites eques (Steindachner 1878) ABQ Abudefduf luridus (Cuvier 1830) Canary damsel AUU Abudefduf saxatilis (Linnaeus 1758) Sergeant-major ABU Abyssobrotula galatheae Nielsen 1977 OAG Abyssocottus elochini Taliev 1955 AEZ Abythites lepidogenys (Smith & Radcliffe 1913) AHD Acanella spp Branched bamboo coral KQL Acanthacaris caeca (A. Milne Edwards 1881) Atlantic deep-sea lobster Langoustine arganelle Cigala de fondo NTK Acanthacaris tenuimana Bate 1888 Prickly deep-sea lobster Langoustine spinuleuse Cigala raspa NHI Acanthalburnus microlepis (De Filippi 1861) Blackbrow bleak AHL Acanthaphritis barbata (Okamura & Kishida 1963) NHT Acantharchus pomotis (Baird 1855) Mud sunfish AKP Acanthaxius caespitosa (Squires 1979) Deepwater mud lobster Langouste -

Benthic O2 Uptake of Two Cold-Water Coral Communities Estimated with the Non-Invasive Eddy Correlation Technique
Vol. 525: 97–104, 2015 MARINE ECOLOGY PROGRESS SERIES Published April 9 doi: 10.3354/meps11211 Mar Ecol Prog Ser OPENPEN ACCESSCCESS Benthic O2 uptake of two cold-water coral communities estimated with the non-invasive eddy correlation technique Lorenzo Rovelli1,*, Karl M. Attard2,3, Lee D. Bryant4,8, Sascha Flögel4, Henrik Stahl1,9, J. Murray Roberts1,5,6, Peter Linke4, Ronnie N. Glud1,2,3,7 1Scottish Association for Marine Sciences, Scottish Marine Institute, Oban PA37 1QA, UK 2Nordic Centre for Earth Evolution (NordCEE), University of Southern Denmark, 5230 Odense M, Denmark 3Greenland Climate Research Centre, Greenland Institute of Natural Resources, 3900 Nuuk, Greenland 4GEOMAR, Helmholtz Centre for Ocean Research Kiel, 24148 Kiel, Germany 5Centre for Marine Biodiversity and Biotechnology, School of Life Sciences, Heriot-Watt University, Edinburgh EH14 4AS, UK 6Center for Marine Science, University of North Carolina Wilmington, Wilmington, NC 28409, USA 7Arctic Research Centre, University of Århus, 8000 Århus C, Denmark 8Present address: Department of Architecture and Civil Engineering, University of Bath, Bath BA2 7AY, UK 9Present address: Zayed University, Dubai Academic City, Dubai, United Arab Emirates ABSTRACT: The community respiration of 2 tidally dominated cold-water coral (CWC) sites was estimated using the non-invasive eddy correlation (EC) technique. The first site, Mingulay Reef Complex, was a rock ridge located in the Sea of Hebrides off Scotland at a depth of 128 m and the second site, Stjernsund, was a channel-like sound in Northern Norway at a depth of 220 m. Both sites were characterized by the presence of live mounds of the reef framework-forming scleractin- ian Lophelia pertusa and reef-associated fauna such as sponges, crustaceans and other corals. -

Towards an Automated Visual Sensor for 3D Analysis and Characterization of Marine Gas Release Sites
Article The Bubble Box: Towards an Automated Visual Sensor for 3D Analysis and Characterization of Marine Gas Release Sites Anne Jordt 1,*, Claudius Zelenka 2, Jens Schneider von Deimling 1, Reinhard Koch 2 and Kevin Köser 1 Received: 1 November 2015; Accepted: 1 December 2015; Published: 5 December 2015 Academic Editors: Fabio Remondino, Fabio Menna and Hans-Gerd Maas 1 GEOMAR Helmholtz Centre for Ocean Research Kiel, Kiel 24148, Germany; [email protected] (J.S.V.D.); [email protected] (K.K.) 2 Department of Computer Science, Kiel University, Kiel 24118, Germany; [email protected] (C.Z.); [email protected] (R.K.) * Correspondence: [email protected]; Tel.: +49-431-600-2571 Abstract: Several acoustic and optical techniques have been used for characterizing natural and anthropogenic gas leaks (carbon dioxide, methane) from the ocean floor. Here, single-camera based methods for bubble stream observation have become an important tool, as they help estimating flux and bubble sizes under certain assumptions. However, they record only a projection of a bubble into the camera and therefore cannot capture the full 3D shape, which is particularly important for larger, non-spherical bubbles. The unknown distance of the bubble to the camera (making it appear larger or smaller than expected) as well as refraction at the camera interface introduce extra uncertainties. In this article, we introduce our wide baseline stereo-camera deep-sea sensor bubble box that overcomes these limitations, as it observes bubbles from two orthogonal directions using calibrated cameras. Besides the setup and the hardware of the system, we discuss appropriate calibration and the different automated processing steps deblurring, detection, tracking, and 3D fitting that are crucial to arrive at a 3D ellipsoidal shape and rise speed of each bubble. -
IFM-GEOMAR Report No. 50
RV SONNE Fahrtbericht / Cruise Report SO239 EcoResponse Assessing the Ecology, Connectivity and Resilience of Polymetallic Nodule Field Systems Balboa (Panama) – Manzanillo (Mexico) 11.03. -30.04.2015 GEOMAR REPORT Berichte aus dem GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel Nr. 25 (N. Ser.) November 2015 RV SONNE Fahrtbericht / Cruise Report SO239 EcoResponse Assessing the Ecology, Connectivity and Resilience of Polymetallic Nodule Field Systems Balboa (Panama) – Manzanillo (Mexico) 11.03. -30.04.2015 Berichte aus dem GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel Nr. 25 (N. Ser.) ISSN Nr.: 2193-8113 Das GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel The GEOMAR Helmholtz Centre for Ocean Research Kiel ist Mitglied der Helmholtz-Gemeinschaft is a member of the Helmholtz Association of Deutscher Forschungszentren e.V. German Research Centres Herausgeber / Editor: Prof. Dr. Pedro Martínez Arbizu and Matthias Haeckel GEOMAR Report ISSN N..r 2193-8113, DOI 10.3289/GEOMAR_REP_NS_25_2015 Helmholtz-Zentrum für Ozeanforschung Kiel / Helmholtz Centre for Ocean Research Kiel GEOMAR Dienstgebäude Westufer / West Shore Building Düsternbrooker Weg 20 D-24105 Kiel Germany Helmholtz-Zentrum für Ozeanforschung Kiel / Helmholtz Centre for Ocean Research Kiel GEOMAR Dienstgebäude Ostufer / East Shore Building Wischhofstr. 1-3 D-24148 Kiel Germany Tel.: +49 431 600-0 Fax: +49 431 600-2805 www.geomar.de RV SONNE SO239 Cruise Report / Fahrtbericht Balboa (Panama) – Manzanillo (Mexico) 11th March 2015 – 30th April 2015 SO239 EcoResponse Assessing the Ecology, Connectivity and Resilience of Polymetallic Nodule field Systems Chief scientist: Prof. Dr. Pedro Martínez Arbizu, Senckenberg am Meer, Deutsches Zentrum für Marine Biodiversitätsforschung, Wilhelmshaven 1 TOC / Inhaltsverzeichnis Inhalt 1. Cruise summary / Zusammenfassung .................................................................................... 4 1.1 German / Deutsch ............................................................................................................