Vision-Based Shipwreck Mapping: on Evaluating Features Quality and Open Source State Estimation Packages
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Polymetallic Nodules Are Essential for Food-Web Integrity of a Prospective Deep-Seabed Mining Area in Pacific Abyssal Plains
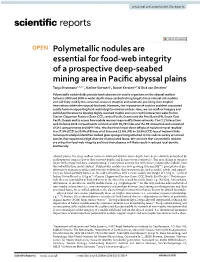
www.nature.com/scientificreports OPEN Polymetallic nodules are essential for food‑web integrity of a prospective deep‑seabed mining area in Pacifc abyssal plains Tanja Stratmann1,2,3*, Karline Soetaert1, Daniel Kersken4,5 & Dick van Oevelen1 Polymetallic nodule felds provide hard substrate for sessile organisms on the abyssal seafoor between 3000 and 6000 m water depth. Deep‑seabed mining targets these mineral‑rich nodules and will likely modify the consumer‑resource (trophic) and substrate‑providing (non‑trophic) interactions within the abyssal food web. However, the importance of nodules and their associated sessile fauna in supporting food‑web integrity remains unclear. Here, we use seafoor imagery and published literature to develop highly‑resolved trophic and non‑trophic interaction webs for the Clarion‑Clipperton Fracture Zone (CCZ, central Pacifc Ocean) and the Peru Basin (PB, South‑East Pacifc Ocean) and to assess how nodule removal may modify these networks. The CCZ interaction web included 1028 compartments connected with 59,793 links and the PB interaction web consisted of 342 compartments and 8044 links. We show that knock‑down efects of nodule removal resulted in a 17.9% (CCZ) to 20.8% (PB) loss of all taxa and 22.8% (PB) to 30.6% (CCZ) loss of network links. Subsequent analysis identifed stalked glass sponges living attached to the nodules as key structural species that supported a high diversity of associated fauna. We conclude that polymetallic nodules are critical for food‑web integrity and that their absence will likely result in reduced local benthic biodiversity. Abyssal plains, the deep seafoor between 3000 and 6000 m water depth, have been relatively untouched by anthropogenic impacts due to their extreme depths and distance from continents 1. -

Rov Kiel 6000“
Journal of large-scale research facilities, 3, A117 (2017) http://dx.doi.org/10.17815/jlsrf-3-160 Published: 23.08.2017 Remotely Operated Vehicle “ROV KIEL 6000“ GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel * Facilities Coordinators: - Dr. Friedrich Abegg, GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel, Germany, phone: +49(0) 431 600 2134, email: [email protected] - Dr. Peter Linke, GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel, Germany, phone: +49(0) 431 600 2115, email: [email protected] Abstract: The remotely operated vehicle ROV KIEL 6000 is a deep diving platform rated for water depths of 6000 meters. It is linked to a surface vessel via an umbilical cable transmitting power (copper wires) and data (3 single-mode glass bers). As standard it comes equipped with still and video cameras and two dierent manipulators providing eyes and hands in the deep. Besides this a set of other tools may be added depending on the mission tasks, ranging from simple manipulative tools such as chisels and shovels to electrically connected instruments which can send in-situ data to the ship through the ROVs network, allowing immediate decisions upon manipulation or sampling strategies. 1 Introduction ROV KIEL 6000 was manufactured by FMCTI / Schilling Robotics LLC (CA/USA) and was delivered to GEOMAR, Kiel in 2007. Funding came from the German state of Schleswig-Holstein, whose capital city Kiel provided the name. The ROV was designed and built to specications which aimed at a balance between system weight, capabilities of the supporting research vessels and the scientic demands. It is one of the most versatile ROV systems world-wide, rated for 6000 m water depth, reaching approx. -

Download-The-Data (Accessed on 12 July 2021))
diversity Article Integrative Taxonomy of New Zealand Stenopodidea (Crustacea: Decapoda) with New Species and Records for the Region Kareen E. Schnabel 1,* , Qi Kou 2,3 and Peng Xu 4 1 Coasts and Oceans Centre, National Institute of Water & Atmospheric Research, Private Bag 14901 Kilbirnie, Wellington 6241, New Zealand 2 Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; [email protected] 3 College of Marine Science, University of Chinese Academy of Sciences, Beijing 100049, China 4 Key Laboratory of Marine Ecosystem Dynamics, Second Institute of Oceanography, Ministry of Natural Resources, Hangzhou 310012, China; [email protected] * Correspondence: [email protected]; Tel.: +64-4-386-0862 Abstract: The New Zealand fauna of the crustacean infraorder Stenopodidea, the coral and sponge shrimps, is reviewed using both classical taxonomic and molecular tools. In addition to the three species so far recorded in the region, we report Spongicola goyi for the first time, and formally describe three new species of Spongicolidae. Following the morphological review and DNA sequencing of type specimens, we propose the synonymy of Spongiocaris yaldwyni with S. neocaledonensis and review a proposed broad Indo-West Pacific distribution range of Spongicoloides novaezelandiae. New records for the latter at nearly 54◦ South on the Macquarie Ridge provide the southernmost record for stenopodidean shrimp known to date. Citation: Schnabel, K.E.; Kou, Q.; Xu, Keywords: sponge shrimp; coral cleaner shrimp; taxonomy; cytochrome oxidase 1; 16S ribosomal P. Integrative Taxonomy of New RNA; association; southwest Pacific Ocean Zealand Stenopodidea (Crustacea: Decapoda) with New Species and Records for the Region. -

Atlantic Ridge (5°S - 11°S) (MAR-SÜD V)
Mid-Atlantic Expedition 2009 FS METEOR Cruise No. 78, Leg 2 Mantle to ocean on the southern Mid- Atlantic Ridge (5°S - 11°S) (MAR-SÜD V) 02.04.2009 Port of Spain – 11.05.2009 Rio de Janeiro SPP 1144: “From Mantle to Ocean: Energy, Material and Life Cycles at Spreading Axes”. SPP 1144 Cruise Report M78/2 June 2009 Content Page 2.1 Participants 3 2.2 Research Program 5 2.3 Narrative of the Cruise 7 2.4 Preliminary Results 13 2.4.1 ROV Kiel 6000 Deployments 13 2.4.2 AUV-Dives 15 2.4.3 Geological Observations and Sampling 21 2.4.4 Physical Oceanography 37 2.4.5 Fluid Chemistry 44 2.4.6 Gases in Hydrothermal Fluids and Plumes 48 2.4.7 Microbial Ecology 52 2.4.8. Hydrothermal Symbioses 56 2.4.9 Volatile Organohalogens 59 2.4.10 Temperature Measurements of Hydrothermal Fluids 64 2.5. Journey Course and Weather 67 2.6 References 69 2.7 Acknowledgments 70 Appendix A 2.1 Stationlist A 1 A 2.2 ROV Station Protocols A 4 A 2.3 Rock Sampling Protocol M78/2: Inside Corner High at 5°S A 56 A 2.4 Fluid Chemistry A 64 A 2.5 Gas Chemistry A 72 A 2.6 Microbiology A 74 A 2.7 Animals Collected During M 78/2 for Symbioses Research A 81 A 2.8 Temperature Measurements of Hydrothermal Fluids A 83 2 / 70 SPP 1144 Cruise Report M78/2 June 2009 2.1 Participants Leg M 78/2 1. -

Algemene Directie Material Resources Divisie Overheidsopdrachten
Brussel, de … MRMP-N/P 17-… Pagina’s: 31 (… Bijl) Algemene Directie Material Resources Divisie Overheidsopdrachten BESTEK MRMP-N/P Nr 17NP002 betreffende de verwerving van een nieuw oceanografisch onderzoeksschip (Research Vessel) voor de Programmatorische Overheidsdienst Wetenschapsbeleid opgesteld op basis van de Wet van 15 juni 2006 (inzake klassieke sectoren) Correspondent: Mark ARNALSTEEN Algemene Directie Material Resources Fregatkapitein Militair Administrateur Divisie Overheidsopdrachten Tel: +32(0)2/44.15432 Sectie Naval Systems Fax: +32(0)2/44.39427 Ondersectie Programma’s E-mail: [email protected] Kwartier Koningin ELISABETH Eversestraat 1 1140 BRUSSEL BELGIË BESTEK MRMP-N/P Nr 17NP002 Pagina 2 Inhoudstafel 0. Gebruikte afkortingen ............................................................................................................ 5 1. Bijzondere bepalingen betreffende de uitvoering van de opdracht ................................... 6 a. Afwijkingen van de algemene uitvoeringsregels (KB2) ...................................................................... 6 b. Andersluidende bepalingen betreffende de toepassing van het KB1 ................................................ 6 2. De overheidsopdracht ........................................................................................................... 6 a. Toepasselijke wetgeving .................................................................................................................... 6 b. Op deze overheidsopdracht toepasselijke opdrachtdocumenten -
IFM-GEOMAR Report No. 50
RV SONNE Fahrtbericht / Cruise Report SO239 EcoResponse Assessing the Ecology, Connectivity and Resilience of Polymetallic Nodule Field Systems Balboa (Panama) – Manzanillo (Mexico) 11.03. -30.04.2015 GEOMAR REPORT Berichte aus dem GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel Nr. 25 (N. Ser.) November 2015 RV SONNE Fahrtbericht / Cruise Report SO239 EcoResponse Assessing the Ecology, Connectivity and Resilience of Polymetallic Nodule Field Systems Balboa (Panama) – Manzanillo (Mexico) 11.03. -30.04.2015 Berichte aus dem GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel Nr. 25 (N. Ser.) ISSN Nr.: 2193-8113 Das GEOMAR Helmholtz-Zentrum für Ozeanforschung Kiel The GEOMAR Helmholtz Centre for Ocean Research Kiel ist Mitglied der Helmholtz-Gemeinschaft is a member of the Helmholtz Association of Deutscher Forschungszentren e.V. German Research Centres Herausgeber / Editor: Prof. Dr. Pedro Martínez Arbizu and Matthias Haeckel GEOMAR Report ISSN N..r 2193-8113, DOI 10.3289/GEOMAR_REP_NS_25_2015 Helmholtz-Zentrum für Ozeanforschung Kiel / Helmholtz Centre for Ocean Research Kiel GEOMAR Dienstgebäude Westufer / West Shore Building Düsternbrooker Weg 20 D-24105 Kiel Germany Helmholtz-Zentrum für Ozeanforschung Kiel / Helmholtz Centre for Ocean Research Kiel GEOMAR Dienstgebäude Ostufer / East Shore Building Wischhofstr. 1-3 D-24148 Kiel Germany Tel.: +49 431 600-0 Fax: +49 431 600-2805 www.geomar.de RV SONNE SO239 Cruise Report / Fahrtbericht Balboa (Panama) – Manzanillo (Mexico) 11th March 2015 – 30th April 2015 SO239 EcoResponse Assessing the Ecology, Connectivity and Resilience of Polymetallic Nodule field Systems Chief scientist: Prof. Dr. Pedro Martínez Arbizu, Senckenberg am Meer, Deutsches Zentrum für Marine Biodiversitätsforschung, Wilhelmshaven 1 TOC / Inhaltsverzeichnis Inhalt 1. Cruise summary / Zusammenfassung .................................................................................... 4 1.1 German / Deutsch ............................................................................................................ -

Twenty-Fifth International Research Ship Operators Meeting (IRSO) 16–19 October 2012 National Oceanography Center Southampton
Twenty‐fifth International Research Ship Operators Meeting (IRSO) 16–19 October 2012 National Oceanography Center Southampton, UK RS I O 2012 25th IRSO 2012 ‐ Minutes Southampton, UK A. PROCEEDINGS 6 A.1. Opening Session 6 A.1.1. Welcome and administrative matters 6 A.1.2. Round table introduction of participants 6 A.1.3. Welcome and introduction to the National Oceanography Center 6 A.1.4. Review of the minutes of 24th IRSO and adoption of agenda 6 A.1.5. Membership rules and adoption of the Terms of Reference 7 A.2. Theme 1: Delegates Reports of Activities 8 A.3. Theme 2: Research Vessel Builds, Modifications & Performance 9 A.3.1. Maritime environmental issues ‐ Gillian Reynolds (GLReynolds) 9 A.3.2. RV Investigator – Toni Moate (CSIRO) 9 A.3.3. RRS Discovery – Ed Cooper (NOC) 9 A.3.4. LICORICE Project – Olivier Lefort (IFREMER) 9 A.3.5. Ke Xue – Yin Hong (IOCAS) 9 A.3.6. RV Sonne replacement – Klaus von Broeckel (GEOMAR) 9 A.3.7. UNOLS/NSF fleet renewal – Bob Houtman (NSF) & Tim Schnoor (US Naval Research) 9 A.3.8. US NOAA fleet – Mike Devany (NOAA) 9 A.3.9. Canadian fleet renewal – Jennifer Nield (Fisheries & Oceans) and Eric Lengelle (Canadian CG) 9 A.3.10. JAMSTEC new build – Kazohiro Maeda (JAMSTEC) 9 A.3.11. IMR new builds – Hilde Spjeld (IMR Norway) 9 A.3.12. HROV: new AUV/ROV – Olivier Lefort (IFREMER) 9 A.3.13. Contracted maintenance of an older vessel – Ron Plaschke (CSIRO) 9 A.3.14. Contracted vs in‐housed management of RV’s – Aodhan FitzGerald (MI) 9 A.3.15. -

Curriculum Vitae – Prof. Dr. Tina Treude
CURRICULUM VITAE – PROF. DR. TINA TREUDE Last Update: July 2020 Affiliation: UNIVERSITY OF CALIFORNIA, LOS ANGELES (UCLA) Dept. Earth, Planetary, and Space Sciences Dept. Atmospheric and Oceanic Sciences Dept. Ecology and Evolutionary Biology 595 Charles E. Young Drive, East 5859 Slichter (Office) 3806 Geology Building (Mail) Los Angeles, California 90095-1567, USA Phone: (001) 310-267-5213 FAX: (001) 310-825-2779 Email: [email protected] Web: http://faculty.epss.ucla.edu/~ttreude/ EDUCATION Dissertation in Biology July 2000 to January 2004 Max Planck Institute for Marine Microbiology, Bremen, Germany, Department of Biogeochemistry Thesis Topic: Anaerobic oxidation of methane in marine sediments Thesis Advisors: Prof. Dr. Antje Boetius and Prof. Dr. Bo Barker Jørgensen Download of thesis (PDF file) at: http://elib.suub.uni-bremen.de/publications/dissertations/E-Diss845_treude.pdf Diploma in Biology September 1999 University of Kiel and GEOMAR Research Center, Kiel, Germany Main subjects: Biological Oceanography, Zoology, and Physical Oceanography Thesis Topic: Community structure and energy budget of deep-sea scavengers in the Arabian Sea Thesis Advisors: Prof. Dr. Michael Spindler and Dr. Ursula Witte PROFESSIONAL EXPERIENCE Professor since July 2018 Professor (tenured) for Marine Geomicrobiology at the University of California, Los Angeles; Department of Earth, Planetary, and Space Sciences; Department of Atmospheric and Oceanic Sciences; Department of Ecology and Evolutionary Biology Prof. Dr. Tina Treude 2 Curriculum Vitae Associate Professor October 2014 to June 2018 Associate Professor (tenured) for Marine Geomicrobiology at the University of California, Los Angeles; Department of Earth, Planetary, and Space Sciences; Department of Atmospheric and Oceanic Sciences Professor (W2) December 2011 to September 2014 Professor (W2, tenured) for Marine Geobiology at the GEOMAR Helmholtz Centre for Ocean Research Kiel and the Christian-Albrechts-University Kiel (CAU), Germany. -

Proceedings of the International Summer School on Visual Computing 2015 August 17-21, 2015 in Rostock, Germany
Hans-Jörg Schulz, Bodo Urban, Uwe Freiherr von Lukas (Eds.) Proceedings of the International Summer School on Visual Computing 2015 August 17-21, 2015 in Rostock, Germany FRAUNHOFER VERLAG Proceedings of the International SUMMER SCHOOL on Visual Computing 2015 "%,$' + ##$" )$$$(#"'%% Proceedings of the International SUMMER SCHOOL on Visual Computing 2015 ''%& "#%&#$!"* Kontakt: Herausgeber: Hans-Jörg Schulz, Bodo Urban, Uwe Freiherr von Lukas Fraunhofer-Institut für Graphische Datenverarbeitung Joachim-Jungius-Straße 11, 18059 Rostock Telefon: +49 381 4024-110 Telefax: +49 381 4024-199 E-Mail: [email protected] URL: http://summerschool.igd-r.fraunhofer.de Bibliografische Information der Deutschen Nationalbibliothek Die Deutsche Nationalbibliothek verzeichnet diese Publikation in der Deutschen National- bibliografie; detaillierte bibliografische Daten sind im Internet über http://dnb.d-nb.de ab- rufbar. ISBN: 978-3-8396-0960-6 Druck und Weiterverarbeitung: IRB Mediendienstleistungen Fraunhofer-Informationszentrum Raum und Bau IRB, Stuttgart Für den Druck des Buches wurde chlor- und säurefreies Papier verwendet. © by FRAUNHOFER VERLAG, 2015 Fraunhofer-Informationszentrum Raum und Bau IRB Postfach 800469, 70504 Stuttgart Nobelstraße 12, 70569 Stuttgart Telefon: +49 711 970-2500, Telefax: +49 711 970-2508 E-Mail: [email protected], URL: http://verlag.fraunhofer.de Titelbild: © OLIVER stockphoto - Fotolia.com Alle Rechte vorbehalten Dieses Werk ist einschließlich aller seiner Teile urheberrechtlich geschützt. Jede -

Predicting the Impacts of Nodule Mining in the Pacific Ocean
SUPPORTED BY Research Team Peer Reviewers Editorial Team Dr. Andrew Chin, Prof. Alex David Rogers, Dr. Helen Rosenbaum, College of Science and Science Director, REV Ocean, Deep Sea Mining Campaign, Engineering, James Cook Oksenøyveien 10, NO-1366 Australia University, Townsville, Australia Lysaker, Norway. Mr. Andy Whitmore, Ms. Katelyn Hari, Dr. Kirsten Thompson, Deep Sea Mining Campaign, College of Science and Lecturer in Ecology, University of United Kingdom Engineering, James Cook Exeter, United Kingdom Dr. Catherine Coumans, University, Townsville, Australia Dr. John Hampton, Mining Watch Canada Dr. Hugh Govan, Chief Scientist, Fisheries Ms. Sian Owen, Adjunct Senior Fellow, School of Aquaculture and Marine Deep Sea Conservation Coalition, Government, Development and Ecosystems Division (FAME), Netherlands International Affairs, University of Pacific Community, Noumea, the South Pacific, Suva, Fiji New Caledonia Mr. Duncan Currie, Deep Sea Conservation Coalition, Dr. Tim Adams, To cite this report New Zealand Fisheries Management Consultant, Chin, A and Hari, K (2020), Port Ouenghi, New Caledonia Design: Ms. Natalie Lowrey, Predicting the impacts of Dr. John Luick, Deep Sea Mining Campaign, mining of deep sea polymetallic Oceanographer, Australia nodules in the Pacific Ocean: Flinders University of South A review of Scientific literature, Australia, Adelaide, Australia For Correspondence: Deep Sea Mining Campaign and Dr. Helen Rosenbaum, MiningWatch Canada, 52 pages Prof. Matthew Allen, DSM Campaign Director of Development [email protected] Studies, School of Government, Development and International Affairs, University of the South Pacific, Suva, Fiji FRONT COVER: A SPERM WHALE AND FREEDIVER. IF NODULE MINING DEVELOPS DEEP-DIVING WHALES LIKE THE VULNERABLE SPERM WHALE COULD BE ADVERSELY IMPACTED. -

Polarstern PS108 Tromsø – Tromsø 22 August 2017 – 9 September 2017
EXPEDITION PROGRAMME PS108 Polarstern PS108 Tromsø – Tromsø 22 August 2017 – 9 September 2017 Coordinator: Rainer Knust Chief Scientist: Frank Wenzhöfer Bremerhaven, Juni 2017 Alfred-Wegener-Institut Helmholtz-Zentrum für Polar- und Meeresforschung Am Handelshafen 12 D-27570 Bremerhaven Telefon: ++49 471 4831- 0 Telefax: ++49 471 4831 – 1149 E-Mail: [email protected] Website: http://www.awi.de Email Coordinator: [email protected] Email Chief Scientist: [email protected] PS108 22 August 2017 - 9 September 2017 Tromsø - Tromsø Chief Scientist Frank Wenzhöfer Coordinator Rainer Knust Contents 1. Überblick und Fahrtverlauf 2 Summary and itinerary 3 2. Biological long-term experiments at the deep seafloor 4 3. High-resolution long-term studies on oxygen consumption to assess seasonal variations in benthic carbon mineralization 9 4. MANSIO-VIATOR - Vestnessa pockmark region - hydrographic, chemical and biological gradients of methane seeps in space and time 11 5. Understanding methane dynamics in the benthic boundary layer off Spitsbergen using novel sensor technology 14 6. Investigating physical and ecological processes in the marginal ice zone using an autonomous underwater vehicle and unmanned aerial vehicles 17 7. Probing the upper 200 m of the water column with a newly developed underwater glider 20 8. Teilnehmende Institute / Participating Institutions 22 9. Fahrtteilnehmer / Cruise Participants 24 10. Schiffsbesatzung / Ship's Crew 26 1 PS108 Expedition Programme 1. ÜBERBLICK UND FAHRTVERLAUF Frank Wenzhöfer (AWI) Das Forschungsschiff Polarstern wird am 22. August von Tromsø aus zur Expedition PS108 auslaufen. Das Arbeitsprogramm dient vornehmlich zwei Themen: (I) Verifikation der Einsatzmöglichkeiten neuer, innovativer Technologien, die im Rahmen der HGF Allianz ROBEX entwickelt wurde, für die Exploration extremer Lebensräume und der kontinuierlichen Untersuchung in der Tiefsee sowie (II) Durchführung von Messungen und Probenahme an den Tiefsee-Experimenten am LTER Observatorium HAUSGARTEN mit Hilfe des ROV KIEL 6000 (Geomar). -
Underwater Image-Based 3D Reconstruction with Quality Estimation
UNDERWATER IMAGE-BASED 3D RECONSTRUCTION WITH QUALITY ESTIMATION Klemen Istenič Per citar o enllaçar aquest document: Para citar o enlazar este documento: Use this url to cite or link to this publication: http://hdl.handle.net/10803/672199 ADVERTIMENT. L'accés als continguts d'aquesta tesi doctoral i la seva utilització ha de respectar els drets de la persona autora. Pot ser utilitzada per a consulta o estudi personal, així com en activitats o materials d'investigació i docència en els termes establerts a l'art. 32 del Text Refós de la Llei de Propietat Intel·lectual (RDL 1/1996). Per altres utilitzacions es requereix l'autorització prèvia i expressa de la persona autora. En qualsevol cas, en la utilització dels seus continguts caldrà indicar de forma clara el nom i cognoms de la persona autora i el títol de la tesi doctoral. No s'autoritza la seva reproducció o altres formes d'explotació efectuades amb finalitats de lucre ni la seva comunicació pública des d'un lloc aliè al servei TDX. Tampoc s'autoritza la presentació del seu contingut en una finestra o marc aliè a TDX (framing). Aquesta reserva de drets afecta tant als continguts de la tesi com als seus resums i índexs. ADVERTENCIA. El acceso a los contenidos de esta tesis doctoral y su utilización debe respetar los derechos de la persona autora. Puede ser utilizada para consulta o estudio personal, así como en actividades o materiales de investigación y docencia en los términos establecidos en el art. 32 del Texto Refundido de la Ley de Propiedad Intelectual (RDL 1/1996).