C-Roads Germany
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

How to Get to Us H by Tram Universität Ost, Botanischer Garten Line 707 by Tube Line U79 (Same Direction)
Heinrich-Heine-Universität Institut for Theoretical Physics II how to get to us H by tram Universität Ost, Botanischer Garten line 707 by tube line U79 (same direction) by bus Universität Mitte lines 735,827,835,836 H building 25.31 Car park P H by bus / taxi / car Parking deck Universität Süd P lines 735,827,835,836 Travel Information Adress Heinrich-Heine-Universität Düsseldorf Universitätsstraße 1 Building 25.31 Level O0 Lecture Hall 5G 40225 Düsseldorf Germany www2.thphy.uni-duesseldorf.de/briscagla [email protected] Office Tel.: +49-211/81-13699 Fax.: +49-211/81-10775 Arrival by plane: Düsseldorf Airport is one of the biggest European airports. You will find good connections to the central station. There are several possibilities to go. If you are at the terminals you can take the tram S11 (to Bergisch-Gladbach). Another possibility is the connection by sky train to the station “Düsseldorf Flughafen”. There you have the chance to go by tram S1 (to Solingen) and/or trains RE 1 (to Aachen), RE 3 (to Düsseldorf Central Station) or RE 5 (to Koblenz). After having arrived at the station you have the opportunity to go directly to the University. Therefore you should take the underground no. U79 (to Düsseldorf Universität Ost) which will leave every 10 - 20 minutes below the Central Station. You may also take the tram no. 707 (to Düsseldorf Universität Ost) which leaves in front of the Central Station. It takes about 10 minutes to go by underground, 20 minutes to go by tram. -

Geometric Proportioning Strategies in Gothic Architectural Design Robert Bork*
$UFKLWHFWXUDO Bork, R 2014 Dynamic Unfolding and the Conventions of Procedure: Geometric +LVWRULHV Proportioning Strategies in Gothic Architectural Design. Architectural Histories, 2(1): 14, pp. 1-20, DOI: http://dx.doi.org/10.5334/ah.bq RESEARCH ARTICLE Dynamic Unfolding and the Conventions of Procedure: Geometric Proportioning Strategies in Gothic Architectural Design Robert Bork* This essay explores the proportioning strategies used by Gothic architects. It argues that Gothic design practice involved conventions of procedure, governing the dynamic unfolding of successive geometrical steps. Because this procedure proves difficult to capture in words, and because it produces forms with a qualitatively different kind of architectural order than the more familiar conventions of classical design, which govern the proportions of the final building rather than the logic of the steps used in creating it, Gothic design practice has been widely misunderstood since the Renaissance. Although some authors in the nineteenth and twentieth centuries attempted to sympathetically explain Gothic geometry, much of this work has been dismissed as unreliable, especially in the influential work of Konrad Hecht. This essay seeks to put the study of Gothic proportion onto a new and firmer foundation, by using computer-aided design software to analyze the geometry of carefully measured buildings and original design drawings. Examples under consideration include the parish church towers of Ulm and Freiburg, and the cross sections of the cathedrals of Reims, Prague, and Clermont-Ferrand, and of the Cistercian church at Altenberg. Introduction of historic monuments to be studied with new rigor. It is Discussion of proportion has a curiously vexed status in finally becoming possible, therefore, to speak with reason- the literature on Gothic architecture. -

Avendihotel Potsdam Privathaus Bergisch Gladbach Privathaus Köln Privathaus Königswinter Privathaus Mainz Seminaris Campus
Königswinter Grand Elysee Hotel Hamburg Grand Hyatt Amman, Jordanien Gürzenich Köln Hotel Alpha-Palmiers Lausanne, Schweiz Hotel Ambassador Bern, Schweiz Hotel Belle Epoque Baden-Baden Hotel Chateau Du Lac Brüssel, Belgien Hotel Four Points by Sheraton Königshof Dresden Hotel Schloß Rabenstein Jungfraujoch Schweiz Hotel Seehof Hotel Sofitel Arc de Triomphe Paris Kempinski Hotel Falkenstein Königstein Kübler‘s Bad Rappenau Kochfabrik Scheck-In Achern La Maison Blanche Paris Landgasthof Löwen Buchholz Waldkirch Le Méridien München Le Royal Méridien Hamburg Messe Friedrichshafen NH Hoteles bundesweit Pullmann Hotel Rive Gauche Paris, Frankreich Renaissance Zurich Hotel Zürich, Schweiz Schlosshotel Bühlerhöhe Bühl, Baden-Baden Schlosshotel Münchhausen Aerzen bei Hameln Seminaris Campus Hotel Berlin Seminaris Hotel Bad Honnef Sheraton Airport Hotel Frankfurt Sheraton Hotel, Charles de Gaulle Airport Paris, Frankreich Steeler Stadtgarten Steigenberger Frankfurter Hof Frankfurt Steigenberger Grandhotel Petersberg Königswinter Steigenberger Hotel Metropolitan Frankfurt Steigenberger Hotel Bad Homburg Steigenberger Mannheimer Hof Mannheim The Westin Grand, Arabellapark München Trianon Palace Waldorf Astoria Collection Versailles, Frankreich Venusberghotel Bonn Vogtlandhalle Greiz Badenova AG & Co. KG Freiburg Bayer AG Leverkusen Bayer Kantine Köln Berufsakademie Horb Berufsakademie Stuttgart Boerse Stuttgart beyer dynamics Heilbronn Cafeteria Air Liquide Paris, Frankreich Carl Edelmann GmbH Heidenheim DASSAULT aviation Agenteul, Frankreich Deutsche -

Bitkom Smart City Index 2020 Berücksichtigt Alle 81 Deutschen Großstädte (100.000 Einwohner Und Mehr)
Smart City Index 2020 Ausführliche Ergebnisse www.bitkom.org Smart City Index 2019 2 Impressum Herausgeber Bitkom e. V. Bundesverband Informationswirtschaft, Telekommunikation und neue Medien e. V. Albrechtstraße 10 | 10117 Berlin Ansprechpartner Svenja Hampel | Projektleiterin Smart City Index T 030 27576 -560 | [email protected] Satz & Layout Sabrina Flemming | Bitkom Titelbild © FotoStuss – adobe.stock.com Copyright Bitkom 2020 Diese Publikation stellt eine allgemeine unverbindliche Information dar. Die Inhalte spiegeln die Auffassung im Bitkom zum Zeitpunkt der Veröffentlichung wider. Obwohl die Informationen mit größtmöglicher Sorgfalt erstellt wurden, besteht kein Anspruch auf sachliche Richtigkeit, Vollständigkeit und / oder Aktualität, insbesondere kann diese Publikation nicht den besonderen Umständen des Einzelfalles Rechnung tragen. Eine Verwendung liegt daher in der eigenen Verantwortung des Lesers. Jegliche Haftung wird ausgeschlossen. Alle Rechte, auch der auszugs- weisen Vervielfältigung, liegen beim Bitkom. Smart City Index 2019 3 Inhaltsverzeichnis Inhaltsverzeichnis Einleitung ________________________________________________________________________ 4 1 Gesamtergebnisse ____________________________________________________________ 9 2 Verwaltung _________________________________________________________________ 14 3 IT- und Kommunikation _______________________________________________________ 19 4 Energie und Umwelt __________________________________________________________ 24 5 Mobilität ___________________________________________________________________ -

Kultur-Ticker Ausgabe 6/2019 Nachrichten Aus Der Und Für Die Bergisch Gladbacher Kultur 31
Kultur-Ticker Ausgabe 6/2019 Nachrichten aus der und für die Bergisch Gladbacher Kultur 31. Mai Sehr geehrte Damen und Herren, herzlich willkommen zur Juni-Ausgabe unserer Kulturnachrichten. Der Newsletter als PDF auf unserer Homepage: www.bergischgladbach.de/newsletter-kultur.aspx. Der Veranstaltungsplaner 2019 ff - Terminübersicht über kulturelle Veranstaltungen ist im Internet abrufbar unter www.bergischgladbach.de/kultureller-veranstaltungsplaner.aspx. Der komplette Terminkalender Veranstaltungen in Bergisch Gladbach nach Datum und Rubriken sortiert finden Sie auch hier. Nachrichten aus der Kulturszene Bergisch Gladbachs gesucht Gerne nehmen wir Ihre Nachrichten im Kultur-Ticker auf. Haben Sie News zu Ihrem Verein, Ihrer Kultureinrichtung, Ihrer Gruppierung / Initiative, möchten Sie über besondere Ereignisse in Bergisch Gladbach berichten oder sich vorstellen, senden Sie Ihren Beitrag bitte an das Kulturbüro, [email protected] oder [email protected]. Redaktionsschluss für den Kultur-Ticker Juli ist am 23. Juni 2019. NEUIGKEITEN WIR GRATULIEREN! Preisträger des diesjährigen Kulturpreises „DER BOPP“ des Stadtverbandes Kultur ist die Katholische Grundschule Frankenforst Herzlichen Glückwunsch!!!! Dr. Lothar Speer, Vorsitzender des Stadtverbandes Kultur und Georg Jasper, Katholische Grundschule Frankenforst Foto: © Heinrich Mehring Der Preisträger des Jahres 2019 ist die Katholische Grundschule Frankenforst mit dem Erzählkonzert „Wo der Pfeffer wächst“ nach dem gleichnamigen Buch von Frank Rupprecht. Die Musik dazu schrieb Hans – Georg Jaspers, der Schulleiter. Er inszenierte auch die Aufführung und gestaltete eine Unterrichtshandreichung, so dass das Stück auch an anderen Schulen geprobt und aufgeführt werden kann. Durch die Idee, das Bilderbuch von Frank Ruprecht zu vertonen und aufzuführen, sind nicht nur viele Kinder der KGS Frankenforst vertieft an die Themen Flucht, Vorurteile, Ausgrenzung und Freundschaft herangeführt worden. -

Industrial Market Profile
Industrial Market Profile Cologne | 4th quarter 2019 January 2020 Industrial Market Profile | 4th quarter 2019 Cologne Warehousing Take-up Weakest take-up for the past ten years Around 89,000 sqm of space larger than 5,000 sqm was taken up in the market for warehousing and logistics space (owner-occupiers and lettings) in the Cologne region* in 2019; this was over 50% below the previous year’s result and below the five-year average. In contrast to previous years, no deals were concluded for units larger than 20,000 sqm and the average size of deals concluded in 2019 was around 9,900 sqm. The largest letting of the year was registered by Logwin AG, in which the logistics com- with a total area of around 17,000 sqm. Companies in the pany signed a contract for around 18,000 sqm in a project distribution/logistics segment accounted for around 50% in Kerpen. The second-largest contract was also conclu- of total take-up, while manufacturers accounted for 26%. ded by a logistics company for an existing unit in Bedburg, In the Cologne urban area, the supply of space available at short notice remains scarce, and no easing of this situation is foreseeable in the coming months. The situation is some- Prime Rent ≥ 5,000 sqm what different in some of the surrounding communities: for example, in Kerpen and Euskirchen, thanks to speculative new construction, there are available units larger than 5,000 sqm. The prime rent for warehousing space larger than 5,000 sqm achieved in the Cologne urban area has remained stable over the past twelve months at €5.10/sqm/month. -
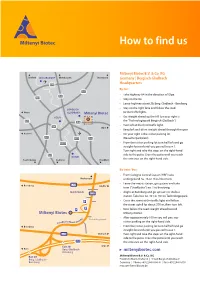
How to Find Us
How to find us Miltenyi Biotec B.V. & Co. KG Krefeld DÜSSELDORF Oberhausen Dortmund Germany | Bergisch Gladbach A 46 Headquarters By car: A 1 • Take highway A4 in the direction of Olpe. A 3 A 57 • Stay on the A4. • Leave highway at exit 20, Berg. Gladbach - Bensberg. • Stay on the right lane and follow the road BERGISCH Venlo GLADBACH Miltenyi Biotec to the traffic lights. KÖLN • Go straight ahead up the hill (on your right is A 61 the “Technologiepark Bergisch Gladbach”). A 4 • Turn left at the third traffic light. A 4 Olpe • Keep left and drive straight ahead through the gate. Aachen • On your right is the visitor parking lot A 1 A 59 A 3 (Besucherparkplatz). A 555 • From the visitor parking lot turn half left and go straight forward until you passed house 1. Turn right and take the steps on the right-hand A 61 side to the patio. Cross the patio until you reach BONN Saarbrücken Koblenz Frankfurt the entrance on the right-hand side. By train / bus: • From Cologne Central Station (HBF) take Herkenrath underground no. 16 or 18 to Neumarkt. • Leave the metro station, go upstairs and take Bensberg L 298 Lindlar tram (“Stadtbahn“) no. 1 to Bensberg. MOITZFELD L 195 • Alight at Bensberg and go upstairs to the bus station. Take bus no. 421 or 454 to Technologiepark. P • Cross the street at the traffic light and follow the street uphill for about 200 m, then turn left. P P • Now follow the road straight ahead toward Miltenyi Biotec Miltenyi Biotec. -

Noise in Europe
Country fact sheet Noise in Europe 2017 overview of policy-related data Germany April 2017 Photo: © Matthias Hintzsche The Environmental Noise Directive (END) requires EU member states to assess exposure to noise from key transport and industrial sources with two initial reporting phases: 2007 and 2012. Where the recommended thresholds for day and night indicators are exceeded, action plans are to be implemented. This country fiche presents data related to END assessments as reported to EEA by 15th April 2016 for the two key END indicators: Lden (day evening and night exposure) and Lnight (night time exposure). 2012 strategic noise maps reported are presented, as well as HIA calculations for annoyance and sleep disturbance, hospital admissions and mortality. Trends are presented as the change in exposure from 2007 to 2012, for comparable sources only. GERMANY Noise sources covered by this assessment Agglomerations Aachen, Augsburg, Bergisch Gladbach, Berlin, Bielefeld, Bochum, Bonn, Bottrop, Braunschweig, > 100.000 inhabitants Bremen, Bremerhaven, Chemnitz, Cologne, Darmstadt, Dortmund, Dresden, Duisburg, Dusseldorf, Erlangen, Essen, Frankfurt, Freiburg, Furth, Gelsenkirchen, Gottingen, Hagen, Halle, Hamburg, Hannover, Heidelberg, Heilbronn, Herne, Hildesheim, Ingolstadt, Karlsruhe, Kassel, Kiel, Koblenz, Krefeld, Leipzig, Leverkusen, Lubeck, Ludwigshafen, Magdeburg, Mainz, Mannheim, Moers, Monchengladbach, Mulheim an der Ruhr, Munich, Munster, Neuss, Nuremberg, Oberhausen, Offenbach, Oldenburg, Osnabruck, Pforzheim, Potsdam, Recklinghausen, -

Logistics- and Industrial Market Overview
H1 | August 2021 Research Germany Logistics- and Industrial Market Overview Demand for logistics space remains high German market for logistics space already breaking records by the mid-point of the year In the first six months of 2021, the German market for an exceptionally high take-up result was recorded here warehousing and logistics space registered a record high in the first half of 2020, due to a single major deal of over take-up volume of around 3.88 million sqm for the first 100,000 sqm. The two largest lettings in the Big 5 were half of the year, exceeding the previous year’s result by registered in Kleinostheim and Hammersbach in the 28% (H1 2020: 3.03 million sqm). The result was also 16% Frankfurt region, each with over 40,000 sqm. and 25% above the corresponding 5- and 10-year aver- ages, respectively. While take-up by owner-occupiers The strongest demand came from companies from the remained almost unchanged (-4%), take-up as a result distribution/logistics sector which accounted for around of lettings increased by 42% year-on-year. The second 38% of take-up. Retailers accounted for a further 29% quarter contributed 2.1 million sqm to this excellent re- and manufacturers for 21%. Take-up increased signifi- sult. It was only the second time that the 2 million sqm cantly in the > 5,000 sqm size category: with 58 deals, mark was exceeded in a 3-month period; the first time 23 more than in the first half of 2020, demand for space ever was in the third quarter of 2020 (2.16 million sqm). -

Julian Faulhaber Cv Julian Faulhaber
JULIAN FAULHABER CV JULIAN FAULHABER Biography 2019/2020 Teaching assignement at the university for photography Dortmund 2013/2014 Teaching assignement at the HAWK, Hildesheim 2012/2013 Visiting Professor at the University of Fine Art (HFBK), Hamburg 2012 - 2014 Teaching assignement at the Academy of Visual Arts, Frankfurt am Main 2007/2008 Teaching assignement at the University of Arts, Bremen 2006/2007 Teaching assignement at the University of Dortmund 2005 - 2009 Member Künstlerhaus Dortmund 2006 Diploma at the class of Susanne Brügger and Piet Wessing 1999 - 2006 studies at the university for photography in Dortmund 1997-1999 various photo-assistants in Frankfurt am Main 1975 born in Würzburg Awards 2016 working stipend of the Foundation Kunstfonds Bonn 2014 „Deutsche Börse Photography Prize 2015“, nomination 2013 Publication Sponsorship for „Catalogue“, Drittelbooks/Stiftung Kunstfonds 2012 „PDN Photo Annual 2012“, finalist 2012 „SPD Competition 2012“, NY, finalist 2011 „KLM Paul Huf Award 2011“, Foam Museum Amsterdam, nomination 2010 „Deutsche Börse Photography Prize 2011“, nomination 2010 „Marianne Brandt Preis“, finalist 2009 „Santa Fe Prize for Photography“, nomination 2009 „KLM Paul Huf Award 2009“, Foam Museum Amsterdam, nomination 2008 „Real Photography Award“, Rotterdam, finalist 2007 „Körber-Award 2007“, prizewinner 2006 „Reinhart-Wolf-Preis 2006“, prizewinner 2006 „BFF-Förderpreis 2006“, prizewinner 2006 „Saar-Förderpreis für junge Kunst“, honorable mention 2005 „Best selected Works“, Epson art photo Award 2005, Art Cologne, honorable mention 2005 „Winner Best Class“, Epson art photo Award 2005, Art Cologne, prizewinner 2003 „Bilderkriege“, Focus Award, Dortmund, nomination Single Exhibitions 2020 „Ideal Spaces“, Goethe Institut, Vilnius, Lithuania 2018 „Ideal Spaces“, KanyaKage, Berlin 2018 „Prototypes“, L.A. -

Ikt-Project-Overview (February 2004)
IKT-Project-Overview 02/2004 1 IKT-PROJECT-OVERVIEW (FEBRUARY 2004) Project and Research Reports "Infection Hazard Resulting from Discharge of Pathogens from Sewer Entry Shafts Entrained in Aerosols"; requested by Ministry for Environmental Affairs NRW (MUNLV); in cooperation with the Hygiene-Institut des Ruhrgebiets; 12/2000; download (in German) under www.ikt.de. "Ecological Effects of Roots Growing into Sewer Channels and Lines and Economic Measures for Avoiding Damage and Repair"; requested by Gelsenkanal; 03/2001, download (in German) under www.ikt.de. "Study of Quality of Completed Sewer Repairs using the Hose Relining Method as an Example“; requested by Ministry for Environmental Affairs NRW under participation of the Municipal Network Provider for Bochum , Dortmund, Duisburg, Gladbeck, Mönchengladbach and Münster; 03/2001, download (in German) under www.ikt.de. "Determination and Elimination of External Water Sources in Sewer Networks“; requested by Abwasserberatung NRW; 06/2001, download (in German) under www.ikt.de. "Federal Survey on Repair of Shaft Structures in the Field of Sewer Engineering using the Coating Method“; requested by Ministry for Environmental Affairs NRW (MUNLV); 07/2001, download (in German) under www.ikt.de. "Flow Measuring Devices for Rainwater Discharge Structures“; requested by Ministry for Environmental Affairs NRW (MUNLV); 07/2001, download (in German) under www.ikt.de. "Recording and Evaluation of Experience with Implementation of the Self-Control Code for Sewers – SüwVKan“; requested by Ministry for Environmental Affairs NRW under participation of the Regional Office of Environmental Affairs in Duisburg; 09/2001, download (in German) under www.ikt.de. "Development and Testing of New Types of Shaft Connections for Reinforced Concrete Sewer Shafts“; requested by Stadtentwässerung Witten; 03/2002, download (in German) under www.ikt.de. -

References Page 1
August 2015 References Page 1 Administration Buildings: MK6 Office and Administration Buildings, Düsseldorf (2015) - DGNB, thermal building simulation, Life Cycle Costs (LCC), life cycle assessment (LCA) Architect: msm architects, Cologne Client: aurelis Real Estate GmbH & Co. KG, Duisburg GFA: 29.000 m² Sumitomo Electric Hartmetall, Willich (2015) - Thermal building simulation of reference areas and total building Architect: Ralf Königshofen, Neuss Owner: Sumitomo Electric Hartmetall, Willich Client: Goldbeck West, Münster GFA: 3.500 m² REWE Administration Building, Rosbach (2015) - Thermal building simulation, DGNB Architect: Heinrich + Steinhardt architects, Bendorf-Sayn Owner: Delius Verwaltung GmbH & Co., Pullach im Isartal Client: Hundhausen GmbH, Siegen GFA: 7.700 m² Steinel, Herzebrock-Clarholz (2015) - Thermal building simulation Architect: Heitmann architects, Gütersloh Client: Heitmann architects, Gütersloh GFA: 3.000 m² Revitalisation of Tripol-Haus, Wiesbaden-Erbenheim (2015) - Thermal building simulation, 3D-flow simulation, energy consulting Architect: Lammel, Wiesbaden Owner: Farinula Grundstücksverwaltungs mbH & Co., Mainz Client: Farinula Grundstücksverwaltungs mbH & Co., Mainz GFA: 12.000 m² Mitsubishi Electric Europe B.V., Ratingen (2014) - Thermal building simulation, 3D-flow simulation for 2 reference rooms Architect: kresings gmbH, Münster Owner: RS& Partner GmbH, Düsseldorf Client: Mitsubishi Electric Europe B.V., Ratingen GFA: 16.000 m² B3 teamtechnik, Freiberg a. Neckar (2014) - Energy consulting, structural