Smartphones As an Integrated Platform for Monitoring Driver Behaviour: the Role of Sensor Fusion and Connectivity Kanarachos, S., Christopoulos, S
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Weekly Wireless Report March 25, 2016
Week Ending: Weekly Wireless Report March 25, 2016 This Week’s Stories Facebook To Drop Support For BlackBerry Devices March 23, 2016 Inside This Issue: This Week’s Stories Facebook is moving on from BlackBerry. Facebook To Drop Support For BlackBerry Devices Bad news, BlackBerry users. Not only is Facebook-owned WhatsApp dropping support for BBOS and BlackBerry 10 devices at the end of the year, now Facebook itself will discontinue supporting the iPhone SE Unveiled; Apple platform. That means the Facebook and Messenger apps will no longer work on either platform. Vows To Protect Customer Privacy The announcement was made on the Inside BlackBerry blog last week. Products & Services BBOS runs on older BlackBerry devices, such as the Bold. BlackBerry 10 powers more recent devices Vevo’s Recommendations such as the Passport and Classic. Get More Personalized, Thanks To Integrations With “We are extremely disappointed in their decision as we know so many users love these apps,” reads Spotify, Twitter And the post. The post goes on to urge users to reach out to both companies using the hashtag YouTube “#ILoveBB10Apps” to “let them know how you feel.” Mapstr Adds Directions To Changing Facebook’s mind will require more than a hashtag, however. In February, Gartner reported Its App To Keep Track of BlackBerry’s global market share was a lowly 0.2% in the fourth quarter of 2015. Your Favorite Places There’s very little incentive to support a platform with such a small user base, especially when Emerging Technology BlackBerry itself is moving away from its BlackBerry 10 operating system in favor of Android-powered Apple Pay Reportedly devices, such as the Priv. -
'Appy to Get You There!
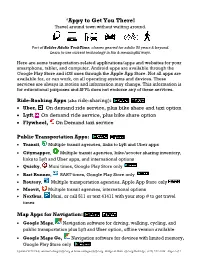
‘Appy to Get You There! Travel around town without waiting around. Part of Bolder Adults TechTime, classes geared for adults 50 years & beyond. Learn to use current technology in fun & meaningful ways. Here are some transportation-related applications/apps and websites for your smartphone, tablet, and computer. Android apps are available through the Google Play Store and iOS ones through the Apple App Store. Not all apps are available for, or can work, on all operating systems and devices. These services are always in motion and information may change. This information is for educational purposes and SFPL does not endorse any of these services. Ride-Booking Apps (aka ride-sharing): Uber, On demand ride service, plus bike share and taxi option Lyft, On demand ride service, plus bike share option Flywheel, On Demand taxi service Public Transportation Apps: Transit, Multiple transit agencies, links to Lyft and Uber apps Citymapper, Multiple transit agencies, bike/scooter sharing inventory, links to Lyft and Uber apps, and international options Quicky, Muni times, Google Play Store only Bart Runner, BART times, Google Play Store only Routesy, Multiple transportation agencies, Apple App Store only Moovit, Multiple transit agencies, international options Nextbus, Muni, or call 511 or text 41411 with your stop # to get travel times Map Apps for Navigation: Google Maps, Navigation software for driving, walking, cycling, and public transportation plus Lyft and Uber option, offline version available Google Maps Go, Navigation software -

Transport in the Digital Age Disruptive Trends for Smart Mobility
Transport in the Digital Age Disruptive Trends for Smart Mobility March 2015 Contents Foreword 1 Executive summary 2 Rising demand for transport 3 Trends in digital age transport 4 User centred 6 Integrated and intelligent 8 Pricing and payments 11 Automation and safety 14 Public and private innovation 17 Looking ahead 19 About the authors 20 Endnotes 21 Foreword Change has already arrived in transport. The current wave of digital innovation, which has brought us travel planning on our smartphones and far greater access to customer information, was predicted in our 2012 Deloitte University Press publication and the pace of change is accelerating. In the last three years digital disruption has become more widespread and companies like Uber have grown to become multi-billion dollar global enterprises. It is now timely to update our research and to examine the trends that we believe will be relevant to the future of the metro, rail, road, air and automotive industries. Smart mobility strives to integrate all modes of transport to provide the vision of a seamless end to end journey experience. Technology has a major role to play as the transport sector now stands on the brink of great change, where digital innovation will go further to bring about improvements in operations, asset management and the delivery of capital programmes. As the global population in urban areas reaches four billion, our current research seeks to stimulate debate about the future transport services passengers desire and how digital innovation can support this, and provide a framework for predicting the trends that will shape the transport industry. -

Public Transport Applications for Smartphones
University of Eastern Finland School of Computing Master’s Thesis Public transport applications for smartphones Golam Rabbi 2nd of January 2019 ABSTRACT Public transports and their timetable are inseparable parts of the urban lifestyle. It is essential to know the public transport information to ensure the commute quality and time. This information can be fetched using a mobile phone app, which unfortunately are not available in the market. The popular public transport applications in the market are not satisfying the needs of all kinds of users, which is being reflected in their review comments. The number of cities, where the applications are providing their service is far less than the world’s total city count. We have analyzed different types of public transport applications and identified different types of users to know the reason behind users’ disappointments and the unavailability of service in most of the cities of the world. We proposed a model for public transport application and built a prototype to partially demonstrate the application. We have also described improvements which are neither available in any application in the market nor suggested by any user. Keywords: Public transport application, mobile app, smartphone app, ticketing system I ACKNOWLEDGEMENTS I would like to thank the University of Eastern Finland and the IMPIT program for providing a nice educational environment which helped me a lot during my master’s degree study life. I would like to thank my thesis advisor Professor Pasi Fränti for reviewing my thesis draft scrupulously and giving me a clear suggestion to write it correctly. I am very thankful to Dr. -
A Time of Unprecedented Change in the Transport System
— History — Governance — Trends A time of — People — Future — Scenarios for 2040 unprecedented — Geography change in the transport system January 2019 The Future of Mobility Preface Transport is critical for the economy. It creates opportunities for growth, generates jobs, and fa- cilitates trade and realises economies of scale. It enhances UK competitiveness by improving con- nectivity across local, regional and national areas. Mobility is central to the whole of society. It allows people to connect with places, and shapes how we live our lives. Social changes in the last twenty years have greatly altered how and why we use the transport system; shifts over the next twenty years will likely be even more significant. Changes such as the growing, ageing population will meet technological advances in electric power, digitalisation and automation. These technologies will bring opportunities, offering fresh innovation to existing needs, as well as radical new approaches. They will also bring challenges, however. Realising the full potential of technology requires us to consider how users’ travel behaviour will respond to it, and how all of society and our economy can benefit. To be truly transformational, we need to view transport as a system: to consider it as a whole. The future of transport needs to balance a wide range of considerations. Capacity has a role to play, but it must be linked to making travel more sustainable overall, be this through lower emissions, less travel or better linking our journeys to housing and work. A focus on people is central to the future of mobility. Understanding how citizens and businesses make decisions and interact with technology provides an opportunity to place the user at the heart of an integrated system. -
Analysis of Journey Planner Apps and Best Practice Features
Research and Design: Innovative Digital Tools to Enable Greener Travel Analysis of Journey Planner Apps and Best Practice Features 12.6.1 Report October 2016 Revised 3rd November 2016 Contents Aims and Objectives 3 Introduction 4 Executive Summary 5 Scope 6 Background 7 High level features 8 Usability 10 Conclusion 12 Appendix: Ranking Table 14 Appendix: Features 15 Appendix: Usability test 16 Appendix: Popularity 18 October 2016 Revised 3rd November 2016 Centre for Complexity Planning & Urbanism Report prepared by E.Cheung and U.Sengupta email: [email protected] [email protected] Manchester School of Architecture MMU Room 7.02 Chatham Building, Cavendish Street, Manchester M15 6BR, United Kingdom Aims and Objectives This report aims to form an investigative report in existing journey planner apps and to identify best practice features. The result of the study will inform subsequent research and design of innovative digital tools to enable greener travel. Key Objectives:- • Select multi-transport journey planner apps. • Identify high level features in journey planners. • Conduct a usability test on each selected app. • Identify best practice qualities and recommendations. Abbreviations App Application API Application Programming Interface GIS Geographic Information System GPS Global Positioning System POI Point of Interest UI User Interface 3 Introduction Journey Planner In principle, the process of planning a journey from one location to another involves decisions on the mode of transportation Define origin and (E.g. car, cycle, public transport or on foot) and potential routes destination to get to the destination. Factors such as journey time and cost are typically the main considerations in the choice of routes and mode of transport. -

Tfl Powered Apps - Market Review Findings
TfL powered apps - market review findings Stop & think session 17th June 2015 Contents 1 Background and objectives 2 Summary of travel tools research 3 What current TfL data tells us 4 Social media and discourse analysis 5 Summary Background and objectives Background . As of January 2015, 7 million people across the UK access travel information through a mobile application. National Rail have the most used travel app in the country with over 1.3 Million people accessing it each month (Source: ComScore January 2015). TfL currently has a successful Open Data strategy that has led to the powering of over 360 travel apps in the UK market – all utilizing TfL’s data in a multitude of different ways. In past research for TfL conducted by 2CV, customer appetite for a TfL app has been clear (indeed many customers believe they are already using TfL apps!). However, TfL’s strategy stipulates that building an official app for customers is not necessary unless a clear gap in the market (not already filled by TfL data-powered apps) can be identified. Before any large scale strategic work is undertaken, TfL want to gain a better understanding of the travel app market – focussing on the 360+ apps they power - there is a need to understand which of these apps customers value and why. TfL has also commissioned a large scale project (TfL Touchpoints) to inform its customer information strategy. This piece of work will look at identifying current and future gaps / opportunities in customers’ needs and will aid understanding of the potential for a TfL app . -

An Android-Based Personalized Public Transportation Advisor
Proceedings of the World Congress on Engineering 2017 Vol I WCE 2017, July 5-7, 2017, London, U.K. An Android-Based Personalized Public Transportation Advisor Joao C. Ferreira, Henrique Silva, Jose A. Afonso, Member, IAENG, and Joao L. Afonso since there are 673 different bus routes in London alone [1]. Abstract— This work presents the development of a mobile This topic has stirred a high level of interest from local application which allows the user to access real time data governments and the public, as well as investment from related with public transportation information. This companies worldwide, due the impact that information application combines the geographic user context and preferences with the data provided by a public transportation technology can have. information system, fulfilling the necessities of today’s The solution proposed in this work makes use of the passengers and providing an incentive for the population to use widespread availability of Android smartphones to create a the public transportation infrastructure. The proposed personalized public transportation advisor taking into application, still in prototype stage, allows the user to benefit account the user’s personal preferences, current location and from real time access to public transportation data in a simple desirable destination. Making use of high speed mobile and intuitive form. Results from use cases and real world tests using data from a Brazilian bus fleet operator were employed networks, like 4G and Wi-Fi, available today in big cities, to validate the operability and features of the developed this prototype combines the user’s current context with the prototype. -

Mobile Apps and Transportation: a Review of Smartphone Apps and a Study of User Response to Multimodal Traveler Information
OCTOBER 2016 Mobile Apps and Transportation: A Review of Smartphone Apps and a Study of User Response to Multimodal Traveler Information Final Report Susan Shaheen, Ph.D. Elliot Martin, PH.D. Adam Cohen Apoorva Musunuri Abhinav Bhattacharyya tsrc Mobile Apps and Transportation: A Review of Smartphone Apps and a Study of User Response to Multimodal Traveler Information Final Report Susan Shaheen, Ph.D. Elliot Martin, Ph.D. Adam Cohen Apoorva Musunuri Abhinav Bhattachharyya October 2016 1 STATE OF CALIFORNIA • DEPARTMENT OF TRANSPORTATION ADA Notice TECHNICAL REPORT DOCUMENTATION PAGE For individuals with sensory disabilities, this document is available in alternate TR0003 (REV 10/98) formats. For information call (916) 654-6410 or TDD (916) 654-3880 or write Records and Forms Management, 1120 N Street, MS-89, Sacramento, CA 95814. 1. REPORT NUMBER 2. GOVERNMENT ASSOCIATION NUMBER 3. RECIPIENT'S CATALOG NUMBER 4. TITLE AND SUBTITLE 5. REPORT DATE Mobile Apps and Transportation: A Review of Smartphone Apps and A Study of User Response to Multimodal Traveler Information October 2016 6. PERFORMING ORGANIZATION CODE N/A 7. AUTHOR 8. PERFORMING ORGANIZATION REPORT NO. Susan Shaheen, Elliot Martin, Adam Cohen, Apoorva Musunuri, Abhinav Bhattacharyya N/A 9. PERFORMING ORGANIZATION NAME AND ADDRESS 10. WORK UNIT NUMBER University of California at Berkeley Institute of Transportation Studies N/A Berkeley, CA 94720 11. CONTRACT OR GRANT NUMBER XXXXX 12. SPONSORING AGENCY AND ADDRESS 13. TYPE OF REPORT AND PERIOD COVERED California Department of Transportation (Caltrans) Final Report, April 2015 - October 2016 Division of Research, Innovation and System Information, MS-83 1227 O Street Sacramento, CA 95814 14. -

Foursquare + Apptopia
Mobility Reimagined Tracking transportation trends in the U.S. using mobile app & location data JULY 2020 1 MOBILITY REIMAGINED Largely driven by the COVID-19 pandemic, people in the U.S. are shifting away from public transportation and ridesharing. Instead, they’re opting for more isolated modes of transportation, such as driving and biking. By combining Apptopia’s mobile app performance estimates and Foursquare location data, we’ve created a clear, comprehensive picture of this mobility evolution. These data signals will help you market more intelligently within this rapidly shifting sector — discover new opportunities, identify potential roadblocks, and plan for the road ahead. RIDESHARE DRIVING BIKES & SCOOTERS PUBLIC TRANSIT 2 DOWNSHIFT: PUBLIC TRANSIT Non-essential places of work closed in March, and while public transportation remained open, far fewer people chose this mode of transportation. Even as more people return to work, public transportation continues to decline — perhaps because it’s difcult to distance in these environments. KEY INSIGHT: Visits to metro stations are down 68% since mid- KEY INSIGHT: Daily active users of Apptopia’s Public Transit Index February, while train stations are down 60% have declined 59% since mid-February Indexed Foot Trafc To Public Transit Stations Public Transit Index Daily Active Users, U.S. 120 300000 Metro Stations Train Stations Bus Stations 100 250000 80 200000 60 150000 40 100000 20 50000 2020-02-19 2020-03-12 2020-04-03 2020-04-25 2020-05-17 2020-06-08 02/15/20 03/08/20 03/30/20 04/21/20 05/13/20 06/04/20 Chart illustrates indexed foot trafc to metro, train & bus stations, where visits February App Index is comprised of DART, MBTA, MTA and MUNI mobile apps [Dallas, Boston, 19, 2020 is 100, using rolling 7 day averages to account for fuctuations by day of week. -

Smartphone App App Availability Provision Type Category Main Use
Smartphone App App Availability Provision Type Category Main Use Assistive Feature Cost-conscious Feature Language Options App Download Site Miscellaneous Notes https://itunes.apple.com/us/app/abil. Simplified presentation for easy abil.io Free Information Navigation Accessibility ✔ - - io/id980873789 comprehension Visual impairment, voice from Apple Maps Free Information Navigation General ✔ - ✔ https://www.apple.com/ios/maps/ Siri https://itunes.apple.com/us/app/ariadne- Ariadne Paid Information Navigation Accessibility ✔ - - gps/id441063072?mt=8 Visual impairment https://itunes.apple.com/us/app/arro-your- taxi-your-way/id979943889?mt=8&ign- Arro Free Service Travel General - - - mpt=uo%3D4 https://itunes.apple.com/fr/app/blablacar- trusted-carpooling/id341329033? Peer-to-peer carsharing for BlaBlaCar Free Service Travel General - ✔ ✔ l=en&mt=8 long journeys https://itunes.apple. BlindSquare Paid Information Navigation Accessibility ✔ - ✔ com/app/blindsquare/id500557255 Visual impairment https://itunes.apple.com/us/app/blindways- bus-stop-navigation/id1146615175? BlindWays Free Information Navigation Accessibility ✔ - - ls=1&mt=8 https://itunes.apple. English and Spanish, mass Bridj Free Service Travel General - ✔ ✔ com/us/app/bridj/id938140457?mt=8 transport Maps and https://play.google.com/store/apps/details? Bus Checker Free Information navigation General - - ✔ id=com.fatattitude.buscheckermta&hl=en https://itunes.apple. Car2GO Free Service Travel General - ✔ com/us/app/car2go/id514921710?mt=8 Carma Free Service Travel General - ✔ -

BY Kenneth Olmstead and Michelle Atkinson
NUMBERS, FACTS AND TRENDS SHAPING THE WORLD FOR RELEASE November 10, 2015 BY AND Kenneth Olmstead Michelle Atkinson FOR FURTHER INFORMATION ON THIS REPORT: Kenneth Olmstead, Research Associate Lee Rainie, Director, Internet, Science and Technology research Dana Page, Senior Communications Manager 202.419.4372 www.pewresearch.org RECOMMENDED CITATION: Kenneth Olmstead, Michelle Atkinson. “Apps Permissions in the Google Play Store.” Pew Research Center. October 2015. Available at: http://www.pewinternet.org/2015/11/10/apps-permissions-in-the-google-play-store/ 1 PEW RESEARCH CENTER About This Report The research presented here is based on an analysis of 1,041,336 apps available in the Google Play Store, which provides apps for smartphones using Google’s Android operating system. Data about these apps was collected for analysis from June 2014 through September 2014. However, it does not cover the apps ecosystem for iPhones, Windows phones, Blackberry phones or any of the other smartphone operating systems. It is intended to be a comprehensive look at how permissions are used in the Android ecosystem from the vantage point of how users are informed about how their information is collected and used. In addition, this report contains data about users’ behaviors and attitudes around apps based on a nationally representative online survey conducted Jan. 27 to Feb. 16, 2015, as well as data about overall smartphone ownership from a nationally representative telephone survey conducted June 10 to July 12, 2015. This report is a collaborative effort