Download the Raspbian Image from the Official Raspberry Web Site
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Product ID Product Type Product Description Notes Price (USD) Weight (KG) SKU 10534 Mobile-Phone Apple Iphone 4S 8GB White 226.8
Rm A1,10/F, Shun Luen Factory Building, 86 Tokwawan Road, Hong Kong TEL: +852 2325 1867 FAX: +852 23251689 Website: http://www.ac-electronic.com/ For products not in our pricelist, please contact our sales. 29/8/2015 Product Price Weight Product Type Product Description Notes SKU ID (USD) (KG) 10534 mobile-phone Apple iPhone 4S 8GB White 226.8 0.5 40599 10491 mobile-phone Apple iPhone 5s 16GB Black Slate 486.4 0.5 40557 10497 mobile-phone Apple iPhone 5s 16GB Gold 495.6 0.5 40563 10494 mobile-phone Apple iPhone 5s 16GB White Silver 487.7 0.5 40560 10498 mobile-phone Apple iPhone 5s 32GB Gold 536.3 0.5 40564 11941 mobile-phone Apple iPhone 6 128GB Gold 784.1 0.5 41970 11939 mobile-phone Apple iPhone 6 16GB Gold 622.8 0.5 41968 11936 mobile-phone Apple iPhone 6 16GB Silver 633.3 0.5 41965 11942 mobile-phone Apple iPhone 6 16GB Space Grey 618.9 0.5 41971 11940 mobile-phone Apple iPhone 6 64GB Gold 705.4 0.5 41969 11937 mobile-phone Apple iPhone 6 64GB Silver 706.7 0.5 41966 11943 mobile-phone Apple iPhone 6 64GB Space Grey 708 0.5 41972 11963 mobile-phone Apple iPhone 6 Plus 128GB Silver 917.9 1 41991 11955 mobile-phone Apple iPhone 6 Plus 16GB Gold 755.3 1 41983 11961 mobile-phone Apple iPhone 6 Plus 16GB Silver 731.6 1 41989 11958 mobile-phone Apple iPhone 6 Plus 16GB Space Grey 735.6 1 41986 11956 mobile-phone Apple iPhone 6 Plus 64GB Gold 843.1 1 41984 11962 mobile-phone Apple iPhone 6 Plus 64GB Silver 841.8 1 41990 11959 mobile-phone Apple iPhone 6 Plus 64GB Space Grey 840.5 1 41987 12733 mobile-phone ASUS ZenFone 2 ZE550ML Dual SIM -

On Applicability of Wireless Routers to Deployment of Smart Spaces in Internet of Things Environments Sergey A
The 9th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications 21-23 September 2017, Bucharest, Romania On Applicability of Wireless Routers to Deployment of Smart Spaces in Internet of Things Environments Sergey A. Marchenkov, Dmitry G. Korzun Petrozavodsk State University (PetrSU) Petrozavodsk, Russia fmarchenk, [email protected] Abstract – The use of wireless technologies is now in- to extend the platform architecture with other protocols evitable in smart spaces development for Internet of Things. by adding new modules. Consequently, the use of wired A smart space is created by deploying a Semantic Informa- and wireless TCP/IP networks is inevitable in Smart-M3- tion Broker (SIB) on a host device. This paper examines the applicability of a wireless router for being a SIB host based development of smart spaces. device to deployment of smart spaces in Internet of Things Wi-Fi is the most common wireless technology to environments. CuteSIB is one of SIB implementations of interconnect different IoT-enabled devices. Almost every the Smart-M3 platform and focus is on Qt-based devices. smart space environment is equipped with a wireless We provide a technique for creating an OpenWrt-based embedded system composed of CuteSIB software compo- access point (a wireless router) to ensure interaction nents for a smart spaces deployment using a cross-compiling between SIB and agents that operate on mobile devices method. The resulting embedded system is used to deploy (e.g. smartphones, tablets). In this configuration, SIB is the SmartRoom system—a Smart-M3-based application that deployed on a dedicated host device (e.g. -

Qualified Vendors List – Devices
Qualified Vendors List – Devices 1. Power Supplies Model IP-500 HB9024 AcBel R88 PC7063 Aero Cool STRIKE-X 600W CP-850 EA-500D Antec EA-650 EarthWatts Green HCP-1000 AYWUN A1-550-ELITE BQT L7-530W Be quiet BQT S6-SYS-YA-350W Comstars KT-450VE Extreme power plus700W CoolerMaster RS-A00-SPPA-D3 RS-D00-SPHA-D3 AX1500i 75-001971 CMPSU-1000HX CMPSU-850AX Corsair CMPSU-850TXM CS450M 75-010706 RM750 75-001937 Delux DLP-650PG EPM850EWT EnerMAX ERV1050EWT MAXREVO Enertronix EN-300 AX-310HHN FSP PT-650M Geil TTB800G GoldenField ATX-S395 ATX-350P4 GreatWall BTX-500GT HAMER MIT750 Huntkey HK400-55AP JPower SP-1000PS-1M LEPA G1600-MA OCZ OCZ-FTY-750W Power Man IP-S450HQ7-0 LIGHTNING-1000 Rosewill RBR1000-M SS-1000XP SS-1250XM Seasonic SS-760KM S12 II SS-330GB 330W Segotep SG-400PYJ Seventeam ST-550P-AD Copyright 2015 ASUSTeK Computer Inc. PAGE 1 Z170-E Model ST-552PAP Seventeam ST-800PGD SST-ST1500 SST-ST40F-ES Silverstone SST-ST85F-GS SST-60F-P SF-350P14XE Super Flower SF-550P14PE TOUGHPOWER TPX775 TOUGHPOWER1500A Thermaltake TP-1050AH3CSG TPX-1275M TR2-RX-1200AH3CH 2. Hard Drives 2.1. HDD Devices Type Model HDS723030ALA640 Hitachi HDS724040ALE640 HD103SM Samsung HD322GM ST1000DM003 ST1000DX001 ST2000NM0033 ST3000DM001 Seagate ST4000DM000 ST500DM002 ST500LM000-3Y/P SATA 6G ST750LX003 WD1002FAEX WD10EZEX WD2002FAEX WD20EFRX WD25EZRX WD WD30EFRX WD30EZRX WD4001FAEX WD5000AAKX WD5000HHTZ Type Model Hitachi HDS721050CLA362 ST3750528AS Seagate ST95005620AS SATA 3G HDP725050GLA360 Simmtrnics WD10EADS Toshiba MK5061SYN Copyright 2015 ASUSTeK Computer Inc. -

Weekly Wireless Report March 25, 2016
Week Ending: Weekly Wireless Report March 25, 2016 This Week’s Stories Facebook To Drop Support For BlackBerry Devices March 23, 2016 Inside This Issue: This Week’s Stories Facebook is moving on from BlackBerry. Facebook To Drop Support For BlackBerry Devices Bad news, BlackBerry users. Not only is Facebook-owned WhatsApp dropping support for BBOS and BlackBerry 10 devices at the end of the year, now Facebook itself will discontinue supporting the iPhone SE Unveiled; Apple platform. That means the Facebook and Messenger apps will no longer work on either platform. Vows To Protect Customer Privacy The announcement was made on the Inside BlackBerry blog last week. Products & Services BBOS runs on older BlackBerry devices, such as the Bold. BlackBerry 10 powers more recent devices Vevo’s Recommendations such as the Passport and Classic. Get More Personalized, Thanks To Integrations With “We are extremely disappointed in their decision as we know so many users love these apps,” reads Spotify, Twitter And the post. The post goes on to urge users to reach out to both companies using the hashtag YouTube “#ILoveBB10Apps” to “let them know how you feel.” Mapstr Adds Directions To Changing Facebook’s mind will require more than a hashtag, however. In February, Gartner reported Its App To Keep Track of BlackBerry’s global market share was a lowly 0.2% in the fourth quarter of 2015. Your Favorite Places There’s very little incentive to support a platform with such a small user base, especially when Emerging Technology BlackBerry itself is moving away from its BlackBerry 10 operating system in favor of Android-powered Apple Pay Reportedly devices, such as the Priv. -

Koulun Opetuksessa
Tapio Karvo Mobiiliopetuksen käyttömahdollisuuksia: Oppilaiden omien mobiililaitteiden käyttö peruskoulun ala- koulun opetuksessa Tietotekniikan pro gradu -tutkielma 22. toukokuuta 2015 Jyväskylän yliopisto Tietotekniikan laitos Tekijä: Tapio Karvo Yhteystiedot: [email protected] Ohjaajat: Hannakaisa Isomäki ja Markus Hartikainen Työn nimi: Mobiiliopetuksen käyttömahdollisuuksia: Oppilaiden omien mobiililaitteiden käyttö peruskoulun ala-asteen opetuksessa Title in English: Mobile Learning Affordances: Use of pupil’s own mobile devices in primary school Työ: Pro gradu -tutkielma Suuntautumisvaihtoehto: Koulutusteknologia Sivumäärä: 95+8 Tiivistelmä: Muutaman viime vuoden aikana mobiililaitteiden käyttö kouluissa on yleisty- nyt. Tämä on osittain aiheuttanut ristiriitaista keskustelua laitteiden käytöstä opetuksessa. Osa opettajista on ottanut mobiililaitteet opetuskäyttöön innokkaasti. Mobiiliopetuksen mahdollisuuksia ei kuitenkaan ole vielä kovin paljon tutkittu. Tällä tut- kimuksella oli tarkoitus selvittää, mitä mahdollisuuksia oppilaiden omat mobiililaitteet tarjoavat opetukseen. Aineiston analyysissa pyrittiin etsimään tietoa siitä, miten ongelma- perustaisen opetuksen menetelmä ja pelillisyys vaikuttavat opetus- ja oppimisprosessissa, kun opiskelumenetelmänä käytetään mobiilioppimista ja oppilaiden omia mobiililaitteita. Tutkimus tehtiin useamman tapauksen tapaustutkimuksena. Kohderyhmänä tutkimuksessa olivat neljännen ja kuudennen luokan oppilaat yhdellä koululla Pieksämäellä ja Jyväsky- lässä. Empiirinen osa käsitti oppimisprosessin, -
'Appy to Get You There!
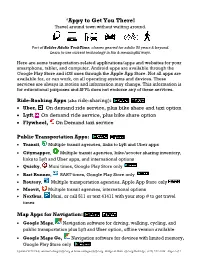
‘Appy to Get You There! Travel around town without waiting around. Part of Bolder Adults TechTime, classes geared for adults 50 years & beyond. Learn to use current technology in fun & meaningful ways. Here are some transportation-related applications/apps and websites for your smartphone, tablet, and computer. Android apps are available through the Google Play Store and iOS ones through the Apple App Store. Not all apps are available for, or can work, on all operating systems and devices. These services are always in motion and information may change. This information is for educational purposes and SFPL does not endorse any of these services. Ride-Booking Apps (aka ride-sharing): Uber, On demand ride service, plus bike share and taxi option Lyft, On demand ride service, plus bike share option Flywheel, On Demand taxi service Public Transportation Apps: Transit, Multiple transit agencies, links to Lyft and Uber apps Citymapper, Multiple transit agencies, bike/scooter sharing inventory, links to Lyft and Uber apps, and international options Quicky, Muni times, Google Play Store only Bart Runner, BART times, Google Play Store only Routesy, Multiple transportation agencies, Apple App Store only Moovit, Multiple transit agencies, international options Nextbus, Muni, or call 511 or text 41411 with your stop # to get travel times Map Apps for Navigation: Google Maps, Navigation software for driving, walking, cycling, and public transportation plus Lyft and Uber option, offline version available Google Maps Go, Navigation software -

Transport in the Digital Age Disruptive Trends for Smart Mobility
Transport in the Digital Age Disruptive Trends for Smart Mobility March 2015 Contents Foreword 1 Executive summary 2 Rising demand for transport 3 Trends in digital age transport 4 User centred 6 Integrated and intelligent 8 Pricing and payments 11 Automation and safety 14 Public and private innovation 17 Looking ahead 19 About the authors 20 Endnotes 21 Foreword Change has already arrived in transport. The current wave of digital innovation, which has brought us travel planning on our smartphones and far greater access to customer information, was predicted in our 2012 Deloitte University Press publication and the pace of change is accelerating. In the last three years digital disruption has become more widespread and companies like Uber have grown to become multi-billion dollar global enterprises. It is now timely to update our research and to examine the trends that we believe will be relevant to the future of the metro, rail, road, air and automotive industries. Smart mobility strives to integrate all modes of transport to provide the vision of a seamless end to end journey experience. Technology has a major role to play as the transport sector now stands on the brink of great change, where digital innovation will go further to bring about improvements in operations, asset management and the delivery of capital programmes. As the global population in urban areas reaches four billion, our current research seeks to stimulate debate about the future transport services passengers desire and how digital innovation can support this, and provide a framework for predicting the trends that will shape the transport industry. -

Public Transport Applications for Smartphones
University of Eastern Finland School of Computing Master’s Thesis Public transport applications for smartphones Golam Rabbi 2nd of January 2019 ABSTRACT Public transports and their timetable are inseparable parts of the urban lifestyle. It is essential to know the public transport information to ensure the commute quality and time. This information can be fetched using a mobile phone app, which unfortunately are not available in the market. The popular public transport applications in the market are not satisfying the needs of all kinds of users, which is being reflected in their review comments. The number of cities, where the applications are providing their service is far less than the world’s total city count. We have analyzed different types of public transport applications and identified different types of users to know the reason behind users’ disappointments and the unavailability of service in most of the cities of the world. We proposed a model for public transport application and built a prototype to partially demonstrate the application. We have also described improvements which are neither available in any application in the market nor suggested by any user. Keywords: Public transport application, mobile app, smartphone app, ticketing system I ACKNOWLEDGEMENTS I would like to thank the University of Eastern Finland and the IMPIT program for providing a nice educational environment which helped me a lot during my master’s degree study life. I would like to thank my thesis advisor Professor Pasi Fränti for reviewing my thesis draft scrupulously and giving me a clear suggestion to write it correctly. I am very thankful to Dr. -
Application Note LSP 500 PRO WLAN Router Compatibility List
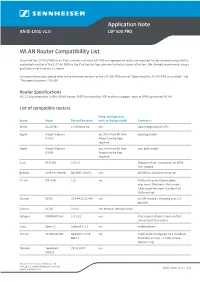
Application Note AN IS-1001 v1.0 LSP 500 PRO WLAN Router Compatibility List To control the LSP 500 PRO via an iPad, a wireless network (WLAN) and appropriate router are required. For guaranteed compatibility and reliable control of the LSP 500 PRO via the iPad Control App, we have tested a number of routers. We strongly recommend using a qualifi ed router from our list below. For more information, please refer to the following sections of the LSP 500 PRO manual “Operating the LSP 500 PRO via a tablet” and “The operating menu / WLAN”. Router Specifi cations 802.11 b/g compatible 2.4GHz WLAN Router, DHCP functionality, UDP multicast support, open or WPA2 protected WLAN List of compatible routers Initial confi guration Brand Model Tested Firmware with an iPad possible? Comments Allnet ALL02761 1.0 Release 04 yes slow recognition of LSPs Apple Airport Express yes, fi rst time OK then old plug model A1264 Airport confi g App required Apple Airport Express yes, fi rst time OK then new desk model A1392 Airport confi g App required Asus RT-N13U 2.0.2.0 Popup on iPad - connection on WAN- Port needed Buffalo WHR-HP-G300N DD-WRT v24SP2 yes DD-WRTas standard fi rmware! D-Link DIR-826L 1.01 no Multicasting must be enabled over menu (Network->Advanced- >Advanced Network->Enable IPv4 Multicasting) Huawei E5331 21.344.11.01.414 yes no SIM needed / charging over LSP possible Linksys E1200 2.0.04 yes (manual confi guration) Netgear WNDR3700v4 1.0.1.32 yes iPad shows hotspot screen on fi rst connect but then works Sony Xperia S Android 4.1.2 no mobile phone… TP Link TL-WR1043ND OpenWrt 12.09 no needs to be confi gured /w a standard Beta 2 PC before 1st use --> http://www. -

Serie Ankauf Alcatel 5060D 5V 10,00 € Alcatel A7 5090Y 10,00 € Apple
Serie Ankauf Alcatel 5060D 5V 10,00 € Alcatel A7 5090Y 10,00 € Apple iPhone 11 64GB 380,00 € Apple iPhone 11 128GB 415,00 € Apple iPhone 11 256GB 480,00 € Apple iPhone 11 Pro 64GB 570,00 € Apple iPhone 11 Pro 256GB 665,00 € Apple iPhone 11 Pro 512GB 770,00 € Apple iPhone 11 Pro Max 64GB 625,00 € Apple iPhone 11 Pro Max 256GB 705,00 € Apple iPhone 11 Pro Max 512GB 740,00 € Apple iPhone 5 64GB 5,00 € Apple iPhone 5s 16GB 5,00 € Apple iPhone 5s 32GB 10,00 € Apple iPhone 5s 64GB 15,00 € Apple iPhone 6 16GB 40,00 € Apple iPhone 6 32GB 55,00 € Apple iPhone 6 64GB 60,00 € Apple iPhone 6 128GB 70,00 € Apple iPhone 6 Plus 16GB 45,00 € Apple iPhone 6 Plus 64GB 60,00 € Apple iPhone 6 Plus 128GB 80,00 € Apple iPhone 6s 16GB 45,00 € Apple iPhone 6s 32GB 65,00 € Apple iPhone 6s 64GB 70,00 € Apple iPhone 6s 128GB 75,00 € Apple iPhone 6s Plus 16GB 75,00 € Apple iPhone 6s Plus 32GB 90,00 € Apple iPhone 6s Plus 64GB 105,00 € Apple iPhone 6s Plus 128GB 110,00 € Apple iPhone 7 32GB 85,00 € Apple iPhone 7 128GB 105,00 € Apple iPhone 7 256GB 120,00 € Apple iPhone 7 Plus 32GB 125,00 € Apple iPhone 7 Plus 128GB 140,00 € Apple iPhone 7 Plus 256GB 180,00 € Apple iPhone 8 64GB 165,00 € Apple iPhone 8 128GB 180,00 € Apple iPhone 8 256GB 205,00 € Apple iPhone 8 Plus 64GB 205,00 € Apple iPhone 8 Plus 128GB 215,00 € Apple iPhone 8 Plus 256GB 240,00 € Apple iPhone SE 16GB 30,00 € Apple iPhone SE 32GB 45,00 € Apple iPhone SE 64GB 60,00 € Apple iPhone SE 128GB 75,00 € Apple iPhone SE 2020 64GB 230,00 € Apple iPhone SE 2020 128GB 255,00 € Apple iPhone SE 2020 256GB 300,00 € Apple iPhone X 64GB 250,00 € Apple iPhone X 256GB 280,00 € Apple iPhone XR 64GB 270,00 € Apple iPhone XR 128GB 300,00 € Apple iPhone XR 256GB 340,00 € Apple iPhone XS 64GB 300,00 € Apple iPhone XS 256GB 340,00 € Apple iPhone XS 512GB 400,00 € Apple iPhone XS Max 64GB 310,00 € Apple iPhone XS Max 256GB 365,00 € Apple iPhone XS Max 512GB 410,00 € Asus ROG Phone II 250,00 € Asus RogPhone 160,00 € Hinweise: n.P. -

MMS Copy of Supported Devices
Good For Enterprise ‐ Certified Devices Country Network Platform Device All All Android Asus Eee Pad Transformer Prime All All Android Cisco Cius All All Android Google Nexus One All All Android HTC Desire (globally unlocked) All All Android HTC Legend (globally unlocked) All All Android HTC One (Google Play Edition) All All Android Kindle Fire All All Android LG Optimus 2X (globally unlocked) All All Android Moto G (Global unlocked) All All Android Moto G (US unlocked) All All Android Motorola Milestone (globally unlocked) All All Android Motorola Milestone 2 (globally unlocked) All All Android Motorola Xoom 2 WiFi All All Android Motorola Xoom WiFi All All Android Nexus 10 All All Android Nexus 4 All All Android Nexus 5 All All Android Nexus 7 (2012, 2013, WiFi only) All All Android Samsung Galaxy Nexus (globally unlocked) All All Android Samsung Galaxy Note 8 (WiFi only) All All Android Samsung Galaxy Note 10.1 (Intl. WiFi only) All All Android Samsung Galaxy Note 10.1 (U.S WiFi only) All All Android Samsung Galaxy Note 10.1 (2014) (WiFi only) All All Android Samsung Galaxy S II All All Android Samsung Galaxy S III (globally unlocked) All All Android Samsung Galaxy S III mini All All Android Samsung Galaxy S4 (Google Play Edition) All All Android Samsung Galaxy S4 (GT‐I9500) All All Android Samsung Galaxy S4 (GT‐I9505) All All Android Samsung Galaxy Tab 2 7 (WiFi only) All All Android Samsung Galaxy Tab 3 (7‐inch) All All Android Samsung Galaxy Tab 3 (8‐inch) All All Android Samsung Galaxy Tab 10.1 (WiFi only) All All Android Samsung -

HR Kompatibilitätsübersicht
HR-imotion Kompatibilität/Compatibility 2018 / 11 Gerätetyp Telefon 22410001 23010201 22110001 23010001 23010101 22010401 22010501 22010301 22010201 22110101 22010701 22011101 22010101 22210101 22210001 23510101 23010501 23010601 23010701 23510320 22610001 23510420 Smartphone Acer Liquid Zest Plus Smartphone AEG Voxtel M250 Smartphone Alcatel 1X Smartphone Alcatel 3 Smartphone Alcatel 3C Smartphone Alcatel 3V Smartphone Alcatel 3X Smartphone Alcatel 5 Smartphone Alcatel 5v Smartphone Alcatel 7 Smartphone Alcatel A3 Smartphone Alcatel A3 XL Smartphone Alcatel A5 LED Smartphone Alcatel Idol 4S Smartphone Alcatel U5 Smartphone Allview P8 Pro Smartphone Allview Soul X5 Pro Smartphone Allview V3 Viper Smartphone Allview X3 Soul Smartphone Allview X5 Soul Smartphone Apple iPhone Smartphone Apple iPhone 3G / 3GS Smartphone Apple iPhone 4 / 4S Smartphone Apple iPhone 5 / 5S Smartphone Apple iPhone 5C Smartphone Apple iPhone 6 / 6S Smartphone Apple iPhone 6 Plus / 6S Plus Smartphone Apple iPhone 7 Smartphone Apple iPhone 7 Plus Smartphone Apple iPhone 8 Smartphone Apple iPhone 8 Plus Smartphone Apple iPhone SE Smartphone Apple iPhone X Smartphone Apple iPhone XR Smartphone Apple iPhone Xs Smartphone Apple iPhone Xs Max Smartphone Archos 50 Saphir Smartphone Archos Diamond 2 Plus Smartphone Archos Saphir 50x Smartphone Asus ROG Phone Smartphone Asus ZenFone 3 Smartphone Asus ZenFone 3 Deluxe Smartphone Asus ZenFone 3 Zoom Smartphone Asus Zenfone 5 Lite ZC600KL Smartphone Asus Zenfone 5 ZE620KL Smartphone Asus Zenfone 5z ZS620KL Smartphone Asus