CHAPTER 3 Frequency Response of Basic BJT and MOSFET Amplifiers (Review Materials in Appendices III and V)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cascode Amplifiers by Dennis L. Feucht Two-Transistor Combinations
Cascode Amplifiers by Dennis L. Feucht Two-transistor combinations, such as the Darlington configuration, provide advantages over single-transistor amplifier stages. Another two-transistor combination in the analog designer's circuit library combines a common-emitter (CE) input configuration with a common-base (CB) output. This article presents the design equations for the basic cascode amplifier and then offers other useful variations. (FETs instead of BJTs can also be used to form cascode amplifiers.) Together, the two transistors overcome some of the performance limitations of either the CE or CB configurations. Basic Cascode Stage The basic cascode amplifier consists of an input common-emitter (CE) configuration driving an output common-base (CB), as shown above. The voltage gain is, by the transresistance method, the ratio of the resistance across which the output voltage is developed by the common input-output loop current over the resistance across which the input voltage generates that current, modified by the α current losses in the transistors: v R A = out = −α ⋅α ⋅ L v 1 2 β + + + vin RB /( 1 1) re1 RE where re1 is Q1 dynamic emitter resistance. This gain is identical for a CE amplifier except for the additional α2 loss of Q2. The advantage of the cascode is that when the output resistance, ro, of Q2 is included, the CB incremental output resistance is higher than for the CE. For a bipolar junction transistor (BJT), this may be insignificant at low frequencies. The CB isolates the collector-base capacitance, Cbc (or Cµ of the hybrid-π BJT model), from the input by returning it to a dynamic ground at VB. -
Cascode Techniques
Analysis and Design of Analog Integrated Circuits Lecture 8 Cascode Techniques Michael H. Perrott February 15, 2012 Copyright © 2012 by Michael H. Perrott All rights reserved. M.H. Perrott Review of Large Signal Analysis of Current Mirrors Vdd Δ V2 I I 1 2 1 μ W2 2 λ nCox (VGS2-VTH) (1+ 2Vds2) I2 2 L = 2 I 1 W 2 1 μ C 1(V -V ) (1+λ V ) 2 n ox GS1 TH 1 ds1 M L1 2 ΔV M1 Vds2 > Vdsat2 1 V +ΔV V +ΔV Δ Δ Δ Δ Vss=0 TH 1 TH 2 But, VTH+ V1=VTH+ V2 V1 = V2 λ I2 W2 L1 (1+ 2Vds2) I2 = λ I1 W1 L2 (1+ 1Vds1) M2 in Saturation Current Mismatch setting due to Vds based on difference M2 in Triode geometry Note: for accurate ratio, set L1 = L2 Vds2 Vdsat2 M.H. Perrott 2 The Issue of Vds Mismatch in Current Mirrors V λ dd I2 W2 (1+ 2Vds2) = λ I1 W1 (1+ 1Vds1) I1 I2 Current Mismatch setting due to Vds based on difference geometry V V ds1 ds2 Note: we are assuming L = L M1 M2 1 2 . Issue: Current I2 can vary significantly as a function of the drain voltage of M2 - We often want a tightly controlled current set only by I1 and transistor sizes . How do we improve the current mirror matching performance? M.H. Perrott 3 Cascoded Current Source I Rth R ref d3 thd3 Ibias Vbias V M bias 3 M3 M ro1 2 M1 . Offers increased output resistance - Reduces small signal dependence of output current on the output voltage of the current source - From Lecture 6, we derived: . -
Optimal High Performance Self Cascode CMOS Current Mirror
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Global Journal of Computer Science and Technology (GJCST) Global Journal of Computer Science and Technology Volume 11 Issue 15 Version 1.0 September 2011 Type: Double Blind Peer Reviewed International Research Journal Publisher: Global Journals Inc. (USA) Online ISSN: 0975-4172 & Print ISSN: 0975-4350 Optimal High Performance Self Cascode CMOS Current Mirror By Vivek Pant, Shweta Khurana Kurukshetra University Kurukshetra Abstract - In this paper the current mirror presented, having low voltage and mixed mode structure has been proposed. The performance of self cascade MOSFET current mirror is optimized with high output impedance and can operate at 1 V or below. Simulation results conform to Analog Mentor tools having Design Architect for schematics and Eldonet for SPICE simulation, with input reference current of 20μA. This review paper presents a comparative performance study of self cascode current mirror with other current mirrors. Keywords : current mirrors, cascode current mirror, low voltage analog circuit. GJCST Classification : I.2.9 Optimal High Performance Self Cascode CMOS Current Mirror Strictly as per the compliance and regulations of: © 2011. Vivek Pant, Shweta Khurana.This is a research/review paper, distributed under the terms of the Creative Commons Attribution-Noncommercial 3.0 Unported License http://creativecommons.org/licenses/by-nc/3.0/), permitting all non commercial use, distribution, and reproduction in any medium, provided the original work is properly cited. Optimal High Performance Self Cascode CMOS Current Mirror Vivek Pantα, Shweta KhuranaΩ Abstract - In this paper the current mirror presented, having I = I (W/L) 2 (1+λVds2) (3) out ref low voltage and mixed mode structure has been proposed. -
A Design Basis for Composite Cascode Stages Operating in the Subthreshold/Weak Inversion Regions
Brigham Young University BYU ScholarsArchive Theses and Dissertations 2012-01-28 A Design Basis for Composite Cascode Stages Operating in the Subthreshold/Weak Inversion Regions Taylor Matt Waddel Brigham Young University - Provo Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Electrical and Computer Engineering Commons BYU ScholarsArchive Citation Waddel, Taylor Matt, "A Design Basis for Composite Cascode Stages Operating in the Subthreshold/Weak Inversion Regions" (2012). Theses and Dissertations. 2934. https://scholarsarchive.byu.edu/etd/2934 This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. A Design Basis for Composite Cascode Stages Operating in the Subthreshold/Weak Inversion Regions Taylor M. Waddel A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of Science David J. Comer, Chair Aaron R. Hawkins Richard H. Selfridge Department of Electrical and Computer Engineering Brigham Young University April 2012 Copyright © 2012 Taylor M. Waddel All Rights Reserved ABSTRACT A Design Basis for Composite Cascode Stages Operating in the Subthreshold/Weak Inversion Regions Taylor M. Waddel Department of Electrical and Computer Engineering, BYU Master of Science Composite cascode stages have been used in operational amplifier designs to achieve ultra- high gain at very low power. The flexibility and simplicity of the stage makes it an appealing choice for low power op-amp designs. Op-amp design using the composite cascode stage is often made more difficult through the lack of a design process. -
A.F. Amplification with the Cascode
A.F. Amplification with the Cascode AN OUTLINE OF THE ADVANTAGES OF THE TWIN-TRIODE OVER THE PENTODE FOR A.F. By G. A. STEVENS R OR to the development of Band television Hence the circuit has the same gain as a pentode with the I III tuners the cascode was very little u5ed, its main same gm as the lower valve. use being in low noise r.f. stages, and it was used Also, since for any valve that has an impedance RA in asP a voltage amplifier in a stabilised power supply, where its cathode, its anode impedance is increased by a factor: high gain was required. + gm The properties that enhance its use for r.f. amplifica We can write (for1 the cascode:-RK)· tion also indicate its suitability as an a.f. voltage amplifier. ra=ra2(I+gm2 ral) (2) These advantages are as follows :- since the anode impedance of VI is in series with the l. High gain. cathode of V2. Therefore, from equations (1) and (2) 2. Low noise. we can derive:- 3. Low inter-electrode capacitances (particularly be gm g 1 2 tween input and output). ft= ra = ra2 . ml ( + gm ral) (3) From equation (2) it can be seen that for a twin triode 4. Capability of being designed with low phase shift (in feedback amplifiers). The characteristics of the cascode that give rise to the -----�------------Vs above advantages are best illustrated by a simplified analysis of the circuit (a fuller analysis will be found in the " Radio Designers' Handbook" by Langford-Smith, Ch. -

Dv/Dt-Control Methods for the Sic JFET/ Si MOSFET Cascode
Dv/dt-control methods for the SiC JFET/ Si MOSFET cascode . Daniel Aggeler, Member, IEEE, Francisco Canales, Member, IEEE, Juergen Biela, Member, IEEE, and Johann W. Kolar, Senior Member, IEEE „This material is posted here with permission of the IEEE. Such permission of the IEEE does not in any way imply IEEE endorsement of any of ETH Zürich’s products or services. Internal or personal use of this material is permitted. However, permission to reprint/republish this material for advertising or promo- tional purposes or for creating new collective works for resale or redistribution must be obtained from the IEEE by writing to [email protected]. By choosing to view this document you agree to all provisions of the copyright laws protecting it.” 4074 IEEE TRANSACTIONS ON POWER ELECTRONICS, VOL. 28, NO. 8, AUGUST 2013 Dv/Dt-Control Methods for the SiC JFET/Si MOSFET Cascode Daniel Aggeler, Member, IEEE, Francisco Canales, Member, IEEE, Juergen Biela, Member, IEEE, and Johann W. Kolar, Fellow, IEEE Abstract—Switching devices based on SiC offer outstanding per- formance with respect to operating frequency, junction tempera- ture, and conduction losses enabling significant improvement of the performance of converter systems. There, the cascode consist- ing of a MOSFET and a JFET has additionally the advantage of being a normally off device and offering a simple control via the gate of the MOSFET. Without dv/dt-control, however, the tran- sients for hard commutation reach values of up to 45kV/μs, which could lead to electromagnetic interference problems. Especially in drive systems, problems could occur, which are related to earth currents (bearing currents) due to parasitic capacitances. -
Chapter 5: BJT AC Analysis Two-Port Systems Approach
Chapter 5: BJT AC Analysis Two-Port Systems Approach This approach: • Reduces a circuit to a two-port system • Provides a “Thévenin look” at the output terminals • Makes it easier to determine the effects of a changing load With Vi set to 0 V: ZTh Zo Ro The voltage across the open terminals is: ETh AvNLVi where AvNL is the no-load voltage gain. Electronic Devices and Circuit Theory, 10/e Copyright ©2009 by Pearson Education, Inc. Robert L. Boylestad and Louis Nashelsky Upper Saddle River, New Jersey 07458 • All rights reserved. Effect of Load Impedance on Gain This model can be applied to any current- or voltage- controlled amplifier. Adding a load reduces the gain of the amplifier: Vo RL A v A vNL Vi RL Ro Zi Ai A v R L Electronic Devices and Circuit Theory, 10/e Copyright ©2009 by Pearson Education, Inc. Robert L. Boylestad and Louis Nashelsky Upper Saddle River, New Jersey 07458 • All rights reserved. Effect of Source Impedance on Gain The fraction of applied signal that reaches the input of the amplifier is: R i Vs Vi R i Rs The internal resistance of the signal source reduces the overall gain: Vo Ri A vs A vNL Vs Ri Rs Electronic Devices and Circuit Theory, 10/e Copyright ©2009 by Pearson Education, Inc. Robert L. Boylestad and Louis Nashelsky Upper Saddle River, New Jersey 07458 • All rights reserved. Combined Effects of RS and RL on Voltage Gain Effects of RL: Vo RLA vNL A v Vi RL Ro Ri Ai A v RL Effects of RL and RS: Vo Ri RL A vs A vNL Vs Ri Rs RL Ro Rs Ri Ais A vs RL Electronic Devices and Circuit Theory, 10/e Copyright ©2009 by Pearson Education, Inc. -

33-Ghz Monolithic Cascode Alinas/Gainas Heterojunction Bipolar Transistor Feedback Amplifier
1378 IEEE JOURNAL OF SOLID-STATE CIRCUITS, VOL. 26, NO. 10, OCTOBER 1991 ductance FETs (NOTFET),” in IEEE Indium Phosphide and Re- amplifiers up to 60 GHz,” in IEEE Microwave and Millimeter-Wuue lated Materials Conf. Dig., 1990, p. 24. Monolithic Circuits Symp. Dig., 1990, pp. 23-26. [5] R. Majidi-Ahy et al., “5.100 GHz InP CPW MMIC 7-section [IO] R. Majidi-Ahy et al., “100 GHz active electronic probe for on-wafer distributed amplifier,” in IEEE Microwarv and Millimeter-War’e S-parameter measurements,” Electron. Lett., vol. 25, no. 13, pp. Monolithic Circuits Symp. Dig., 1990, pp. 31-34. 828-830, 1989. [6] R. Majidi-Ahy et al., “94 GHz InP MMIC five-section distributed [Ill R. Majidi-Ahy et al., “100 GHz high-gain InP MMIC cascode amplifier,” Electron. Lett., vol. 26, no. 2, pp. 91-92, Jan. 1990. amplifier,” in IEEE Gds IC Symp. Proc., 1990, pp. 173-176. [7] N. Camilleri et al., “A W-band monolithic amplifier,’’ in IEEE Int. [12] Y. C. Pao et al., “Impact of surface layer on InAlAs/InGaAs/InP Microwave Symp. Dig., 1990, pp. 903-906. high electron mobility transistors,” IEEE Electron Device Lett., vol. [8] K. H. G. Duh et al., “W-band InGaAs HEMT low noise amplifiers,” 11, no. 7, pp. 312-314, 1990. in IEEE Int. Microwai,e Symp. Dig.,1990, pp. 595-598. [13] L. E. Dickens et al., “A GaAs wideband cascode MMIC amplifier,” [9] C. Yuen et al., “High-gain, low-noise monolithic HEMT distributed in IEEE GdsIC Symp. Proc., 1983, pp. -
Output Impedance for the Current Source? ➔ Ideally, It’S Infinite
Electronics II (ELE 343 – Lecture 2) 1 Review of Common Base (CB) Amplifier ➢ AV, Rin, and Rout? ➢ In common base topology, where the base terminal is biased with a fixed voltage, emitter is fed with a signal, and collector is the output. 2 Review of Emitter Follower (CC Amplifier) ➢ AV, Rin, and Rout? 3 Review of Current Sources ▪ Ideal Current Sources (Definition) A current source is an electronic circuit that delivers or absorbs an electric current which is independent of the voltage across it. [I-V curve] I I V V What is the output impedance for the current source? ➔ Ideally, it’s infinite. What happens if the output impedance is not infinite? 4 Example: Output Impedance ➢ We wish to increase the output resistance of the bipolar cascode of by a factor of two through the use of resistive degeneration in the emitter of Q2. Determine the required value of the degeneration resistor if Q1 and Q2 are identical. ➢ Rout and RoutA? ➢ Typically, r is smaller than rO, so in general it is impossible to double the output impedance by degenerating Q2 with a resistor. 5 Example: Mixed BJT/MOS Cascode 2 1 ➢ RoutA? ➢ RoutB? 6 PNP Cascode Stage Degeneration Tr Cascode Tr ➢ Rout? 7 Another Interpretation of Bipolar Cascode ➢ Instead of treating cascode as Q2 degenerating Q1, we can also think of it as Q1 stacking on top of Q2 (current source) to boost Q2’s output impedance. 8 False Cascodes ➢ Rout? ➢ When the emitter of Q1 is connected to the emitter of Q2, it’s no longer a cascode since Q2 becomes a diode-connected device instead of a current source. -
Experiment No
ST.ANNE’S COLLEGE OF ENGINEERING AND TECHNOLOGY ANGUCHETTYPALAYAM, PANRUTI – 607 110 Department of Electronics & Communication Engineering OBSERVATION EC8361 – ANALOG AND DIGITAL CIRCUITS LABORATORY STUDENT NAME : REGISTER NO : SEMESTER&SEC : YEAR : Faculty In-charge Mr. S. DURAI RAJ AP/ECE 1 | P a g e SYLLABUS EC8361 ANALOG AND DIGITAL CIRCUITS LABORATORY LIST OF ANALOG EXPERIMENTS: 1. Design of Regulated Power supplies 2. Frequency Response of CE, CB, CC and CS amplifiers 3. Darlington Amplifier 4. Differential Amplifiers- Transfer characteristic, CMRR Measurement 5. Cascode / Cascade amplifier 6. Determination of bandwidth of single stage and multistage amplifiers 7. Analysis of BJT with Fixed bias and Voltage divider bias using Spice 8. Analysis of FET, MOSFET with fixed bias, self-bias and voltage divider bias using simulation software like Spice 9. Analysis of Cascode and Cascade amplifiers using Spice 10. Analysis of Frequency Response of BJT and FET using Spice LIST OF DIGITAL EXPERIMENTS: 11. Design and implementation of code converters using logic gates (i) BCD to excess-3 code and vice versa (ii) Binary to gray and vice- versa 12. Design and implementation of 4 bit binary Adder/ Subtractor and BCD adder using IC 7483 13. Design and implementation of Multiplexer and De-multiplexer using logic gates 14. Design and implementation of encoder and decoder using logic gates 15. Construction and verification of 4 bit ripple counter and Mod-10 / Mod-12 Ripple counters 16. Design and implementation of 3-bit synchronous up/down counter 2 | P a g e DESIGN OF REGULATED POWER SUPPLIES EXPERIMENT:1 DATE: AIM: To design and construct a regulated power supplies circuit and to determine the load regulation and efficiency of the regulated power supply. -
ECE 342 Electronic Circuits Lecture 26 Frequency Response of Cascaded Amplifiers
ECE 342 Electronic Circuits Lecture 26 Frequency Response of Cascaded Amplifiers Jose E. Schutt-Aine Electrical & Computer Engineering University of Illinois [email protected] ECE 342 –Jose Schutt‐Aine 1 CE Cascade Amplifier Exact analysis too tedious use computer CE cascade has low upper‐cutoff frequency ECE 342 –Jose Schutt‐Aine 2 MOS Cascode Amplifier Common source amplifier, followed by common gate stage – G2 is an incremental ground 1 Define go1 ro1 1 go2 ro2 1 GL RL RL current source impedance ECE 342 –Jose Schutt‐Aine 3 MOS Cascode Amplifier • CS cacaded with CG Cascode Very popular configuration Often considered as a single stage amplifier • Combine high input impedance and large transconductance in CS with current buffering and superior high frequency response of CG • Can be used to achieve equal gain but wider bandwidth than CS • Can be used to achieve higher gain with same GBW as CS ECE 342 –Jose Schutt‐Aine 4 MOS Cascode Incremental Model iL vo GL igvgvvvgL mb22 s m 22 s s 2 o o 2 iL ivgLsmbm22 g 2 vg so 22 g o 2 GL ECE 342 –Jose Schutt‐Aine 5 MOS Cascode Analysis go2 ivgggLsmbmo122 22 GL igGLoL1/ 2 vs2 gggmb222 m o KCL at vs2 gvmgs121222222 v s g o g m v s g mbs v g o()0 v s v o ECE 342 –Jose Schutt‐Aine 6 MOS Cascode Analysis ggGooL121/ gvmgs1110 i L ggommb22 g 2 gvmgs11 iL ggGooL121/ 1 ggommb22 g 2 vg om 1 vin gGoL12 g o GL ggommb22 g 2 Two cases ECE 342 –Jose Schutt‐Aine 7 MOS Cascode Analysis CASE 1 Case1: If GL 0 The voltage gain becomes vo ggmo12 g m 2 g mboo 212 rr vin AggggggrrMBmommmmboo12 -
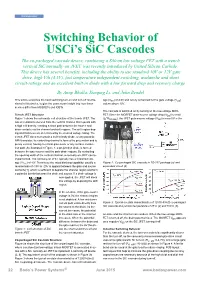
Switching Behavior of Usci's Sic Cascodes
TECHNOLOGYCONTENT Switching Behavior of USCi’s SiC Cascodes The co-packaged cascode device, combining a Silicon low voltage FET with a trench vertical SiC normally-on JFET, was recently introduced by United Silicon Carbide. This device has several benefits, including the ability to use standard 10V or 12V gate drive, high Vth (4.5V), fast temperature independent switching, avalanche and short circuit-ratings and an excellent built-in diode with a low forward drop and recovery charge. By Anup Bhalla, Xueqing Li, and John Bendel This article examines the hard switching turn-on and turn-off mecha- age (VTH) of 4.5V and is fully enhanced for the gate voltage (VGS) nisms in this device, to give the users some insight into how these values above 10V. devices differ from MOSFETs and IGBTs. The cascode is switched on by turning on the low-voltage MOS- Trench JFET Structure FET. Since the MOSFET drain-source voltage drop (VDS) is small Figure 1 shows the schematic cell structure of the trench JFET. The (ID*RDS(ON)), the JFET gate-source voltage (VGS) is near 0V in the low on-resistance derives from the vertical channel that repeats with a high cell density, creating a short path between the source and drain contacts via the channel and drift regions. The drift region dop- ing and thickness are determined by the desired voltage rating. The trench JFET does not contain a built-in body diode, or any parasitic NPN transistor. Its controlling channel is formed by pn-junction and is purely vertical, having no critical gate-oxide or any surface conduc- tion path.