Microprocessor-Based Wireless Dual-Channel
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shahabi-Adib-Masc-ECE-August
A New Line Code for a Digital Communication System by Adib Shahabi Submitted in partial fulfilment of the requirements for the degree of Master of Applied Science at Dalhousie University Halifax, Nova Scotia August 2019 © Copyright by Adib Shahabi, 2019 To my wife Shahideh ii TABLE OF CONTENTS LIST OF TABLES ............................................................................................................ v LIST OF FIGURES .......................................................................................................... vi ABSTRACT ....................................................................................................................viii LIST OF ABBREVIATIONS USED ............................................................................... ix ACKNOWLEDGEMENTS ............................................................................................... x CHAPTER 1 INTRODUCTION ....................................................................................... 1 1.1 BACKGROUND ........................................................................................... 1 1.2 THESIS SYNOPSIS ...................................................................................... 4 1.3 ORGANIZATION OF THE THESIS ............................................................ 5 CHAPTER 2 MODELLING THE LINE CHANNEL ....................................................... 7 2.1 CABLE MODELLING .................................................................................. 7 2.2 TRANSFORMER COUPLING .................................................................. -

Criteria for Choosing Line Codes in Data Communication
ISTANBUL UNIVERSITY – YEAR : 2003 (843-857) JOURNAL OF ELECTRICAL & ELECTRONICS ENGINEERING VOLUME : 3 NUMBER : 2 CRITERIA FOR CHOOSING LINE CODES IN DATA COMMUNICATION Demir Öner Istanbul University, Engineering Faculty, Electrical and Electronics Engineering Department Avcılar, 34850, İstanbul, Turkey E-mail: [email protected] ABSTRACT In this paper, line codes used in data communication are investigated. The need for the line codes is emphasized, classification of line codes is presented, coding techniques of widely used line codes are explained with their advantages and disadvantages and criteria for chosing a line code are given. Keywords: Line codes, correlative coding, criteria for chosing line codes.. coding is either performed just before the 1. INTRODUCTION modulation or it is combined with the modulation process. The place of line coding in High-voltage-high-power pulse current The transmission systems is shown in Figure 1. purpose of applying line coding to digital signals before transmission is to reduce the undesirable The line coder at the transmitter and the effects of transmission medium such as noise, corresponding decoder at the receiver must attenuation, distortion and interference and to operate at the transmitted symbol rate. For this ensure reliable transmission by putting the signal reason, epecially for high-speed systems, a into a form that is suitable for the properties of reasonably simple design is usually essential. the transmission medium. For example, a sampled and quantized signal is not in a suitable form for transmission. Such a signal can be put 2. ISSUES TO BE CONSIDERED IN into a more suitable form by coding the LINE CODING quantized samples. -
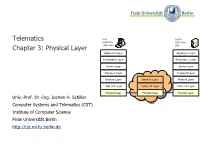
Telematics Chapter 3: Physical Layer
Telematics User Server watching with video Chapter 3: Physical Layer video clip clips Application Layer Application Layer Presentation Layer Presentation Layer Session Layer Session Layer Transport Layer Transport Layer Network Layer Network Layer Network Layer Data Link Layer Data Link Layer Data Link Layer Physical Layer Physical Layer Physical Layer Univ.-Prof. Dr.-Ing. Jochen H. Schiller Computer Systems and Telematics (CST) Institute of Computer Science Freie Universität Berlin http://cst.mi.fu-berlin.de Contents ● Design Issues ● Theoretical Basis for Data Communication ● Analog Data and Digital Signals ● Data Encoding ● Transmission Media ● Guided Transmission Media ● Wireless Transmission (see Mobile Communications) ● The Last Mile Problem ● Multiplexing ● Integrated Services Digital Network (ISDN) ● Digital Subscriber Line (DSL) ● Mobile Telephone System Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.2 Design Issues Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.3 Design Issues ● Connection parameters ● mechanical OSI Reference Model ● electric and electronic Application Layer ● functional and procedural Presentation Layer ● More detailed ● Physical transmission medium (copper cable, Session Layer optical fiber, radio, ...) ● Pin usage in network connectors Transport Layer ● Representation of raw bits (code, voltage,…) Network Layer ● Data rate ● Control of bit flow: Data Link Layer ● serial or parallel transmission of bits Physical Layer ● synchronous or asynchronous transmission ● simplex, half-duplex, or full-duplex transmission mode Univ.-Prof. Dr.-Ing. Jochen H. Schiller ▪ cst.mi.fu-berlin.de ▪ Telematics ▪ Chapter 3: Physical Layer 3.4 Design Issues Transmitter Receiver Source Transmission System Destination NIC NIC Input Abcdef djasdja dak jd ashda kshd akjsd asdkjhasjd as kdjh askjda Univ.-Prof. -
CODING for Transmission
CODING for Transmission Professor Izzat Darwazeh Head of Communicaons and Informaon System Group University College London [email protected] Acknowledgement: Dr A. Chorti, Princeton University for slides on FEC coding Dr P.Moreira, CERN, for slides on the CERN Gigabit Transmitter (GBT) Dr J. Mitchell, UCL, for the sampled music and voice. June 2011 Coding • Defini7ons and basic concepts • Source coding • Line coding • Error control coding Digital Line System Message Message source Distortion, sink interference Input Output signal and noise signal Encoder- Demodulator modulator -decoder Communication Transmitted channel Received signal signal Claude Shannon • Shannon’s Theorem predicts reliable communicaon in the presence of noise “Given a discrete, memoryless channel with capacity C, and a source with a posi8ve rate R (R<C), there exist a code such that the output of the source can be transmi@ed over the channel with an arbitrarily small probability of error.” • B is the channel bandwidth in Hz and S/N is the signal power to noise power rao ⎛⎞S CBc =+log2 ⎜⎟ 1 ⎝⎠N Types of Coding • Source Coding – Encoding the raw data • Line (or channel) Coding – Formang of the data stream to benefit transmission • Error Detec7on Coding – Detec7on of errors in the data seQuence • Error Correcon Coding – Detec7on and Correc7on of Errors • Spread Spectrum Coding – Used for wireless communicaons Signals and sources: Discrete - Con8nuous m(t) n Continuous Time and Amplitude n Discrete Time, continuous Amplitude – PAM signal n Discrete Time, and Amplitude -

Episode 3.11 – Polar and Bipolar Line Coding
Episode 3.11 – Polar and Bipolar Line Coding Welcome to the Geek Author series on Computer Organization and Design Fundamentals. I’m David Tarnoff, and in this series we are working our way through the topics of Computer Organization, Computer Architecture, Digital Design, and Embedded System Design. If you’re interested in the inner workings of a computer, then you’re in the right place. The only background you’ll need for this series is an understanding of integer math, and if possible, a little experience with a programming language such as Java. And one more thing. Our topics involve a bit of figuring, so it might help to keep a pencil and paper handy. In Episode 3.10, we looked at the electrical connection between two digital devices and saw two ways we could use a positive voltage and a zero voltage level to code the logic zeros and logic ones of our data. This unipolar scheme had a disadvantage. The capacitance of a conductor could cause the signal voltage levels to drift toward the positive voltage making it difficult to identify when the transmitted signal was supposed to be zero volts. To solve the drift problem, some physical lines use polar signaling. In this case, the zero volt level is replaced with a voltage that is equal in magnitude and opposite in polarity to the positive voltage. Bipolar signaling is a further extension of polar signaling. Bipolar brings back the zero volt level along with the positive or high level and the negative or low level so that there are three electrical levels. -

Analog Signal Is Unknown in Advance the Form Is Known in Advance Each Relay Amplifies Both the Signal and the Noise
Signal Transmission Fundamentals Advanced Computing and Networking Introduction Joint master program Skoltech and CMC MSU Prof. R. Smelyanskiy Signals, Data, Transmission • Data - a description of facts, phenomena • Signals - presentation of data during transmission • Transmission is the process of interaction between a transmitter and a receiver in order to transmit a signal. Data Signals • Origin data can take many forms • Signals - analog vs digital - analog vs digital • Analog data: voice video • Discrete data (digital) - text: letter, symbol - picture: pixel AC&N Prof. R. Smelyanskiy 14-Sep-20 2 The mathematical representation of the signal AC&N Prof. R. Smelyanskiy 14-Sep-20 3 Signal spectrum AC&N Prof. R. Smelyanskiy 14-Sep-20 4 Fourier transformation Euler's formula Euler's formula AC&N Prof. R. Smelyanskiy 14-Sep-20 5 Discrete Fourier Transformation Direct Fourier Transformation: N is the number of signal values measured over a period, as well as the number of decomposition components; xn, n = 0, ..., N - 1, are the measured signal values (in discrete time N - 1), which are input data for direct transformation and output for the inverse one; Xk, (k = 0, ..., N – 1 are the indexes of the amplitudes in a complex form of the sinusoidal signals composing the original Invers Fourier Transformation : one) are output for direct conversion and input for inverse; since the amplitudes are complex, then they can be used to calculate both the amplitude and phase; k is the frequency index. The frequency of the k-th signal is k / T, where T is the period of time during which the input data was taken. -

Performance Evaluation of Power Spectral Density of Different Line Coding Technique
National Conference on Recent Trends in Engineering & Technology Performance evaluation of Power Spectral Density of different line coding technique Darshankumar C. Dalwadi1, Bhargav C. Goradiya2, Milendrakumar M. Solanki3, Mehfuza S.Holia4 1Asst. Prof., Electronics & Telecommunication dept., B.V.M. Engineering college, V.V.Nagar, 2Asso. Prof. & Head, Electronics & Telecommunication dept., B.V.M. Engineering College, V.V.Nagar, 3Asst. Prof., Electronics dept., B.V.M. Engineering College, V.V.Nagar, 4Asst. Prof., Electronics dept., B.V.M. Engineering College, V.V.Nagar Abstract—In this paper we have presented an effect of different the actual or implied integral clock cycle. The real question is line coding technique. We have plot power spectral density of that of sampling--the high or low state will be received different line coding technique like non return to zero, return to correctly provided the transmission line has stabilized for that zero and Manchester coding with respect to the different bit when the physical line level is sampled at the receiving frequencies. We have also shown the which line coding technique end. is best compare to all of them. We used the MATLAB in our simulation work. However, it is helpful to see NRZ transitions as happening on the trailing (falling) clock edge in order to compare NRZ- Level to other encoding methods, such as the mentioned I. INTRODUCTION Manchester code, which requires clock edge information (is The basic block diagram of digital communication system the XOR of the clock and NRZ, actually) and to see the involves sampler, quantizer and line coder. The sampler difference between NRZ-Mark and NRZ-Inverted. -

Fully Reused VLSI Architecture of Differential Manchester Encoding Using SOLS Technique for DSRC Application B
ISSN 2319-8885 Vol.06,Issue.24 July-2017, Pages:4770-4773 www.ijsetr.com Fully Reused VLSI Architecture of Differential Manchester Encoding Using SOLS Technique for DSRC Application B. TEJASWINI1, B. VAMSI KRISHNA2 1PG Scholar, Dept of ECE, Gudlavalleru Engineering College, Gudlavalleru, AP, India, Email: [email protected]. 2Assistant Professor, Dept of ECE, 2Gudlavalleru Engineering College, Gudlavalleru, AP, India, Email: [email protected]. Abstract: The Encoding techniques has received great attention in last few years due to their ability to reduce the power dissipation which is the main requirement in low power VLSI design. The dedicated short-range communication (DSRC) is an emerging technique to push the intelligent transportation system into our daily life. This paper proposes a Differential Manchester encoding using Similarity Oriented logic Simplification(SOLS) technique. This SOLS technique is based on two core methods 1)Area compact retiming 2)Balance logic operation sharing .The designed encoding technique has high hardware utilization rate. In addition to that the designed technique is better than the existing counterparts in terms of power consumption, delay. The designed technique is modeled using Verilog HDL and functionality is verified with Xilinx ISE 13.1. Keywords: DSRC, SOLS, VLSI, Manchester, Encoding. I. INTRODUCTION II. FM0 AND DIFFERENTIAL MANCHESTER Differential Manchester encoding is a line code in CODING PRINCIPLES which data and clock signals are combined to form a self A. FM0 Encoding synchronizing data stream. In various specific applications, The coding principle of FM0 is listed as the following this line code is also called by various other names, three rules. including BiphaseMark Code(BMC), Frequency Modulation If X is the logic-0, the FM0 code must exhibit a (FM).This SOLS consists of two core methods, area compact transition between A and B. -
Chapter 4 Digital Transmission
Chapter 4 Digital Transmission Digital-to-Digital Conversion Analog-to-Digital Conversion Transmission Modes Wireless System Lab, NCNU 1 Digital Transmission Before transmission, information is converted to Digital signal Analog signal Chapter 3 discusses advantages of digital transmission over analog transmission. Techniques used to transmit data digitally Digital-to-digital conversion. Analog-to-digital conversion. Transmission modes of data transmission. Wireless System Lab, NCNU 2 Digital Transmission Before transmission, information is converted to Digital signal Analog signal Chapter 3 discusses advantages of digital transmission over analog transmission. Techniques used to transmit data digitally Digital-to-digital conversion. Analog-to-digital conversion. Transmission modes of data transmission. Wireless System Lab, NCNU 3 Chapter 4 Digital Transmission Digital-to-Digital Conversion Wireless System Lab, NCNU 4 Digital-to-Digital Conversion How to represent digital data (0101011 bit stream) by using digital signals. Three techniques: Line coding Block coding Scrambling Line coding is always needed; block coding and scrambling may or may not be needed. Wireless System Lab, NCNU 5 Line Coding and Decoding Digital data: text, numbers, images, audio, or video, are converted as bit stream. Sender encodes digital data into digital signal. Receiver decodes the digital signal to digital data. Line coding maps binary information sequence into digital signal. (絞肉機) Ex: “1” mapped to +A square pulse; “0” to –A pulse Wireless System Lab, NCNU 6 Signal Element versus Data Element Data element The smallest entity that can represent a piece of information: this is bit. Signal element The shortest unit (timewise) of a digital signal. In other words Data element are what we need to send. -

Comparison and Analysis of Codes for Remodulation WDM-PON with Adaptive Code Selection
Optics Communications 285 (2012) 3259–3263 Contents lists available at SciVerse ScienceDirect Optics Communications journal homepage: www.elsevier.com/locate/optcom Comparison and analysis of codes for remodulation WDM-PON with adaptive code selection Yang Lu a,b, Shenglei Wang a, Duoduo Zeng a, Lei Xu c, Changjian Guo b,⁎, Sailing He a,b a Centre for Optical and Electromagnetic Research (COER), State Key Laboratory of Modern Optical Instrumentation, Zhejiang University, Hangzhou 310058, China b ZJU-SCNU Joint Research Center of Photonics, South China Normal University, Guangzhou 510006, China c NEC Labs America, Princeton, NJ 08540, USA article info abstract Article history: In a remodulation PON, the upstream signal quality can be improved when the downstream signal is coded. Received 15 October 2011 But low code efficiency may result in network congestion in downlink. Based on the downlink traffic, a self- Received in revised form 10 March 2012 adapting PON can select the proper downstream modulation codes to achieve the optimal network perfor- Accepted 12 March 2012 mance. With adaptive code selection, network congestion can be avoided and the remodulated upstream Available online 27 March 2012 signal suffers minimal performance degradation. Some codes of various coding efficiency are required to be selected in this self-adapting PON. These codes should induce as little crosstalk to the upstream signal as Keywords: fi Line codes possible. Several candidate codes with coding ef ciencies from 50% to 80%, such as Manchester code, 3b5b Code efficiency code, 4b5b code, 4b6b code and 6b8b code are tested through simulation and experiment in this paper, and WDM-PON their performances are compared. -

Line Coding” Mobile Communications Handbook Ed
LoCicero, J.L. & Patel, B.P. “Line Coding” Mobile Communications Handbook Ed. Suthan S. Suthersan Boca Raton: CRC Press LLC, 1999 c 1999byCRCPressLLC LineCoding 6.1 Introduction 6.2 CommonLineCodingFormats UnipolarNRZ(BinaryOn-OffKeying) • UnipolarRZ • Polar NRZ • PolarRZ[Bipolar,AlternateMarkInversion(AMI),or Pseudoternary] • ManchesterCoding(SplitPhaseorDigital Biphase) 6.3 AlternateLineCodes DelayModulation(MillerCode) • SplitPhase(Mark) • Biphase (Mark) • CodeMarkInversion(CMI) • NRZ(I) • BinaryN ZeroSubstitution(BNZS) • High-DensityBipolarN(HDBN) • TernaryCoding 6.4 MultilevelSignalling,PartialResponseSignalling,and DuobinaryCoding MultilevelSignalling • PartialResponseSignallingandDuobi- naryCoding JosephL.LoCicero 6.5 BandwidthComparison IllinoisInstituteofTechnology 6.6 ConcludingRemarks BhaskerP.Patel DefiningTerms IllinoisInstituteofTechnology References 6.1 Introduction Theterminologylinecodingoriginatedintelephonywiththeneedtotransmitdigitalinformation acrossacoppertelephoneline;morespecifically,binarydataoveradigitalrepeateredline.The conceptoflinecoding,however,readilyappliestoanytransmissionlineorchannel.Inadigitalcom- municationsystem,thereexistsaknownsetofsymbolstobetransmitted.Thesecanbedesignatedas {mi},i=1;2;:::;N,withaprobabilityofoccurrence{pi},i=1;2;:::;N,wherethesequentially transmittedsymbolsaregenerallyassumedtobestatisticallyindependent.Theconversionorcoding oftheseabstractsymbolsintoreal,temporalwaveformstobetransmittedinbasebandistheprocess oflinecoding.Sincethemostcommontypeoflinecodingisforbinarydata,suchawaveformcanbe -
Serial Line Coding Converters AN-CM-264
Application Note Serial Line Coding Converters AN-CM-264 Abstract Because of its efficiency, serial communication is common in many industries. Usually, standard protocols like UART, I2C or SPI are used for serial interfaces. However, in many industrial applications, dedicated or customized serial protocols may be very desirable. Some customized serial protocols are based on standard line codes, and conversion to custom can be simplified. This app note details using the Dialog SLG46537 CMIC for several line code conversion examples. In this way, line code customization can be achieved in an inexpensive and easy way. This application note comes complete with design files which can be found in the References section. AN-CM-264 Serial Line Coding Converters Contents Abstract ................................................................................................................................................ 1 Contents ............................................................................................................................................... 2 Figures .................................................................................................................................................. 2 Tables ................................................................................................................................................... 3 1 Terms and Definitions ................................................................................................................... 4 2 References ....................................................................................................................................