Development and Analysis of a Multi-Link Suspension for Racing Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Caster Camber Tire-Wear Angles
BASIC WHEEL ALIGNMENT odern steering and ples. Therefore, let’s review these basic the effort needed to turn the wheel. suspension systems alignment angles with an eye toward Power steering allows the use of more are great examples of typical complaints and troubleshooting. positive caster than would be accept- solid geometry at able with manual steering. work. Wheel align- Caster Too little caster can make steering ment integrates all the factors of steer- Caster is the tilt of the steering axis of unstable and cause wheel shimmy. Ex- Ming and suspension geometry to pro- each front wheel as viewed from the tremely negative caster and the related vide safe handling, good ride quality side of the vehicle. Caster is measured shimmy can contribute to cupped wear and maximum tire life. in degrees of an angle. If the steering of the front tires. If caster is unequal Front wheel alignment is described axis tilts backward—that is, the upper from side to side, the vehicle will pull in terms of angles formed by steering ball joint or strut mounting point is be- toward the side with less positive (or and suspension components. Tradi- hind the lower ball joint—the caster more negative) caster. Remember this tionally, five alignment angles are angle is positive. If the steering axis tilts when troubleshooting a complaint of checked at the front wheels—caster, forward, the caster angle is negative. vehicle pull or wander. camber, toe, steering axis inclination Caster is not measured for rear wheels. (SAI) and toe-out on turns. When we Caster affects straightline stability Camber move from two-wheel to four-wheel and steering wheel return. -
Wheel Alignment Simplified
The WHAT and WHY of Toe Caster - Camber Kingpin Inclination - Thrust Angle Steering Angle – Wheel setback WHEEL ALIGNMENT SIMPLIFIED Wheel alignment is often considered complicated and hard to understand In the days of the rigid chassis construction with solid axles, when tyres were poor and road speeds were low, wheel alignment was simply a matter of ensuring that the wheels rolled along the road in parallel paths. This was easily accomplished by means of using a toe gauge or simple tape measure. The steering wheel could then also simply be repositioned on the splines of the steering shaft. Camber and Caster was easily adjustable by means of shims. Today wheel alignment is of course more sophisticated as there are several angles to consider when doing wheel alignment on the modern vehicle with Independent suspension systems, good performing tyres and high road speeds. Below are the most common angles and their terminology and for the correction of wheel alignment and the diagnoses thereof, the understanding of the principals of these angles will become necessary. Doing the actual corrections of wheel alignment is a fairly simple task and in many instances it is easily accomplished by some mechanical adjustments. However Wheel Alignment diagnosis is not so straightforward and one will need to understand the interaction between the wheel alignment angles as well as the influence the various angles have on each other. In addition there are also external factors one will need to consider. Wheel Alignment Specifications are normally given in angular values of degrees and minutes A circle consists of 360 segments called DEGREES, symbolized by the indicator ° Each DEGREE again has 60 segments called MINUTES symbolized by the indicator ‘. -

Road & Track Magazine Records
http://oac.cdlib.org/findaid/ark:/13030/c8j38wwz No online items Guide to the Road & Track Magazine Records M1919 David Krah, Beaudry Allen, Kendra Tsai, Gurudarshan Khalsa Department of Special Collections and University Archives 2015 ; revised 2017 Green Library 557 Escondido Mall Stanford 94305-6064 [email protected] URL: http://library.stanford.edu/spc Guide to the Road & Track M1919 1 Magazine Records M1919 Language of Material: English Contributing Institution: Department of Special Collections and University Archives Title: Road & Track Magazine records creator: Road & Track magazine Identifier/Call Number: M1919 Physical Description: 485 Linear Feet(1162 containers) Date (inclusive): circa 1920-2012 Language of Material: The materials are primarily in English with small amounts of material in German, French and Italian and other languages. Special Collections and University Archives materials are stored offsite and must be paged 36 hours in advance. Abstract: The records of Road & Track magazine consist primarily of subject files, arranged by make and model of vehicle, as well as material on performance and comparison testing and racing. Conditions Governing Use While Special Collections is the owner of the physical and digital items, permission to examine collection materials is not an authorization to publish. These materials are made available for use in research, teaching, and private study. Any transmission or reproduction beyond that allowed by fair use requires permission from the owners of rights, heir(s) or assigns. Preferred Citation [identification of item], Road & Track Magazine records (M1919). Dept. of Special Collections and University Archives, Stanford University Libraries, Stanford, Calif. Conditions Governing Access Open for research. Note that material must be requested at least 36 hours in advance of intended use. -

Vehicle Dynamics and Performance Driving
Vehicle Dynamics In the world of performance automobiles, speed does not rule everything. However, ask any serious enthusiast what the most important performance aspect of a car is, and he'll tell you it's handling. To those of you who know little to nothing about automobiles, handling determines the vehicle's ability to corner and maneuver. A good handling car will be able to maneuver with ease, zig-zag between cones, and frolic through windy roads. A poor handling car, however, will have trouble maneuvering, knock over cones, and will most likely end up in the ditch if trying to make its way through windy roads. Want to have fun while driving? Buy a good handling car. A car that can maneuver well will be safer and much more fun to drive. According to Racing Legend Mario Andretti, "handling is an automobile's soul." It determines the difference between a car that's enjoyable to drive and one that's simply a means for getting from Point A to Point B. According to their handling properties, cars such as the BMW M3, the Porsche 911 Carrera 4, and the Lotus Elise should bring the driver the most excitement (The Ultimate Driving Experience). While cars like the Dodge Viper may provide the driver with an abundance of power and speed, the poor handling may take away from driver excitement. So what makes a car handle well? A car's handling abilities are solely determined by how they obey the laws of physics. The physics of handling involves everything from forces to torque, so evaluating handling is an extremely complicated affair. -

Dog Flu Strikes Palo Alto Area Page 5
Palo Vol. XXXIX, Number 18 Q February 2, 2018 Alto Dog flu strikes Palo Alto area Page 5 www.PaloAltoOnline.comw w w. P a l o A l t o O n l i n e. c o m In a fix Rising construction costs create high anxiety for city of Palo Alto Page 24 INSIDE THIS ISSUE Pulse 11 Spectrum 12 Transitions 14 Movies 30 Home 35 Puzzles 43 QArts Songwriter, playwright Stew takes on messy heroes Page 29 QSeniors VA studies connect exercise and the brain Page 31 QSports M-A favored in CCS girls wrestling tournament Page 45 TOO MAJOR TOO MINOR JUST RIGHT FOR HOME FOR HOSPITAL FOR STANFORD EXPRESS CARE When an injury or illness needs quick attention but not Express Care is available at two convenient locations: in the Emergency Department, call Stanford Express Care. Staffed by doctors, nurses, and physician assistants, Stanford Express Care Palo Alto Hoover Pavilion Express Care treats children (6+ months) and adults for: 211 Quarry Road, Suite 102 Palo Alto, CA 94304 • Respiratory illnesses • UTIs (urinary tract tel: 650.736.5211 • Cold and flu infections) Stanford Express Care San Jose • Stomach pain • Pregnancy tests River View Apartment Homes • Fever and headache • Flu shots 52 Skytop Street, Suite 10 San Jose, CA 95134 • Back pain • Throat cultures tel: 669.294.8888 • Cuts and sprains Open Everyday by Appointment Only Express Care accepts most insurance and is billed as 9:00am–9:00pm a primary care, not emergency care, appointment. Providing same-day fixes every day, 9:00am to 9:00pm. -

(Title of the Thesis)*
Reconfigurable Integrated Control for Urban Vehicles with Different Types of Control Actuation by Mansour Ataei A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Doctor of Philosophy in Mechanical and Mechatronics Engineering Waterloo, Ontario, Canada, 2017 © Mansour Ataei 2017 Examining committee membership: The following served on the Examining Committee for this thesis. The decision of the Examining Committee is by majority vote. Supervisors: Prof. Amir Khajepour Professor Mechanical and Mechatronics Department Prof. Soo Jeon Associate Mechanical and Mechatronics Department Professor External Prof. Fengjun Yan Associate McMaster University Examiner: Professor Department of Mechanical Engineering Internal- Prof. Nasser Lashgarian Azad Associate System Design Engineering external: Professor Internal: Prof. William Melek Professor Mechanical and Mechatronics Department Internal: Prof. Ehsan Toyserkani Professor Mechanical and Mechatronics Department ii AUTHOR'S DECLARATION I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. iii Abstract Urban vehicles are designed to deal with traffic problems, air pollution, energy consumption, and parking limitations in large cities. They are smaller and narrower than conventional vehicles, and thus more susceptible to rollover and stability issues. This thesis explores the unique dynamic behavior of narrow urban vehicles and different control actuation for vehicle stability to develop new reconfigurable and integrated control strategies for safe and reliable operations of urban vehicles. A novel reconfigurable vehicle model is introduced for the analysis and design of any urban vehicle configuration and also its stability control with any actuation arrangement. -
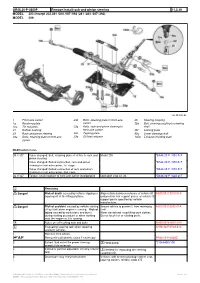
Remove/Install Rack-And-Pinion Steering 11.3.10 MODEL 203 (Except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209
AR46.20-P-0600P Remove/install rack-and-pinion steering 11.3.10 MODEL 203 (except 203.081 /084 /087 /092 /281 /284 /287 /292) MODEL 209 P46.20-2123-09 1 Front axle carrier 23b Bolts, retaining plate to front axle 25 Steering coupling 1g Retaining plate carrier 25a Bolt, steering coupling to steering 10a Tie rod joints 23g Bolts, rack-and-pinion steering to shaft 21 Rubber bushing front axle carrier 25f Locking plate 23 Rack-and-pinion steering 23n Tapping plate 80a Lower steering shaft 23a Bolts, retaining plate to front axle 23q Oil lines retainer 105d Exhaust shielding plate carrier Modification notes 29.11.07 Value changed: Bolt, retaining plate of oil line to rack-and- Model 203 *BA46.20-P-1001-01F pinion steering Value changed: Bolted connection, rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 1st stage Value changed: Bolted connection of rack-and-pinion *BA46.20-P-1002-01F steering to front axle carrier, 2nd stage 30.11.07 Torque, retaining plate to front axle carrier incorporated Operation step 23, 24 *BA46.20-P-1004-01F Removing Danger! Risk of death caused by vehicle slipping or Align vehicle between columns of vehicle lift AS00.00-Z-0010-01A toppling off of the lifting platform. and position four support plates at vehicle lift support points specified by vehicle manufacturer. Danger! Risk of accident caused by vehicle starting Secure vehicle to prevent it from moving by AS00.00-Z-0005-01A off by itself when engine is running. Risk of itself. -

Design and Development of Multi-Link Suspension Suspension System
ISSN: 2455-2631 © June 2019 IJSDR | Volume 4, Issue 6 Design and Development of Multi-Link Suspension Suspension System 1Piyush Parida, 2Vaibhav Itkikar, 3Harshal Patil, 4Sandip Patil 1,2,3,4UG Students Mechanical Engineering Department G.H. Raisoni College of Engineering and Management, Chas, Ahmednagar, India Abstract: In order to provide a comfortable ride to the passengers and avoid additional stresses in motor car frame, the car should neither bounce or roll or sway the passengers when cornering nor pitch when accelerating. For this purpose the virtual prototype of suspension systems were built in software MSC ADAMS/CAR and suspensions for military truck were analyzed keeping in mind the optimization of suspension parameters. As there is tremendous development in Suspension Technology, Multi-Link suspension system are considered better independent suspension system among all other independent suspension system. Its simple design and construction makes it way more convenient to install and serve its purpose. As there is vast growth in Agriculture, farming becoming more and more advanced in terms of technology and in that transport vehicles play important role in making agriculture more productive. We saw different scenario where agriculture transport vehicles collapsing because of their conventional suspension system fails to stabalize the loaded vehicle on different road conditions. We tried to see the improvement in performance of vehicle in stabalizing itself by using Multi- Link suspension system. Keywords: Suspension, links, vibrations, Multi body dynamic analysis (MBD) 1. INTRODUCTION In heavy transport vehicle field existing dependent suspension system unit is used. If some have that is leaf spring suspension. In all cases Leaf spring design for full load condition. -

Design of Constant Velocity Coupling
Design of Constant Velocity Coupling Prof. A. A. Moghe1, Mr. Yuvraj Patil2, Mr. Mayur Pawar³, Mr. Akshaykumar Thaware4, Mr. Nitin Thorawade5 1Assistant Professor, 2,3,4,5UG Students Department of Mechanical Engineering Sppu, PVPIT, Pune, Mahrashtra, India ABSTRACT: A coupling is mechanical device used to connect two shafts together at their ends for the purpose of transmission of power. The basic role of couplings is to join two parts of rotating elements while permitting some degree of misalignment or end movement or both. Presently Oldham’s coupling and Universal joints are used for parallel offset power transmission and angular offset transmission. These joints have limitations on maximum offset distance, angle, speed and result in vibrations, noise and low efficiency (below 70%). These limitations can be overcome with Thompson constant velocity (CV) coupling which offers features like minimizing side loads, higher misalignment capabilities, more operating speeds, improved efficiency of transmission and many more. The constant velocity joint is an alteration in design that offers up to 18 mm parallel offset and 21-degree angular offset, at high speeds up to 2000 or 2500 rpm at 90% efficiency. This design lowers cost of production, space requirement and simply technology of manufacture as compared too present CVJ in market. This paper presents review on constant velocity joints/couplings design and optimization. Keywords: Thompson constant velocity joint, Optimization & design, Constant velocity couplings, Parallel Offset, Angular Offset, Power Transmission. [I] INTRODUCTION The basic function of a power transmission coupling is to transmit torque from an input/driving shaft to an output/driven shaft at a specified shaft speed. -
Final Report
Final Report Reinventing the Wheel Formula SAE Student Chapter California Polytechnic State University, San Luis Obispo 2018 Patrick Kragen [email protected] Ahmed Shorab [email protected] Adam Menashe [email protected] Esther Unti [email protected] CONTENTS Introduction ................................................................................................................................ 1 Background – Tire Choice .......................................................................................................... 1 Tire Grip ................................................................................................................................. 1 Mass and Inertia ..................................................................................................................... 3 Transient Response ............................................................................................................... 4 Requirements – Tire Choice ....................................................................................................... 4 Performance ........................................................................................................................... 5 Cost ........................................................................................................................................ 5 Operating Temperature .......................................................................................................... 6 Tire Evaluation .......................................................................................................................... -
Vehicle Simulation to Drive Formula Sae Design Decisions
VEHICLE SIMULATION TO DRIVE FORMULA SAE DESIGN DECISIONS STEVEN WEBB MONASH UNIVERSITY 2012 SUPERVISED BY DR SCOTT WORDLEY Final Year Project 2012 Final Report SUMMARY This report covers the creation of a simple program that approximates lap time and energy for Formula SAE cars. In 2010 it was decided that Monash Motorsport would do a “clean sheet” design, so the simulation was made in order to find the effect each aspect of the car has on the cars total performance. This report also shows how to correctly validate raw test data against the equations used to create the model in order to improve the accuracy and understanding of the model and to calculate suitable performance metrics for the car. TABLE OF CONTENTS Summary ......................................................................................................................................... 2 Table of Contents ............................................................................................................................ 2 1. Introduction ............................................................................................................................. 4 1.1 Goals and Performance Metrics ........................................................................................ 5 1.2 Variations between different Formula events. .................................................................. 6 1.2.1 Scoring...................................................................................................................... 6 1.2.2 Track Layout ............................................................................................................ -

Formula SAE Interchangeable Independent Rear Suspension Design
Formula SAE Interchangeable Independent Rear Suspension Design Sponsored by the Cal Poly Formula SAE team A Final Report for Reid Olsen, FSAE Technical Director By: Suspension Solutions Design team Mike McCune - [email protected] Daniel Nunes - [email protected] Mike Patton - [email protected] Courtney Richardson - [email protected] Evan Sparer - [email protected] 2009 ME 428/481/470 Table of Contents Abstract ......................................................................................................................................................... 6 Chapter 1: Introduction ............................................................................................................................... 7 FSAE Team History and Opportunity ......................................................................................................... 8 Formal Problem Definition ...................................................................................................................... 10 Objectives/Specification Development ................................................................................................... 11 Chapter 2: Background ............................................................................................................................... 13 Solid Rear Axle Design ............................................................................................................................. 14 Tire Research ..........................................................................................................................................