Introduction to Control Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cmos-Based Amplitude and Phase Control Circuits Designed for Multi
CMOS-BASED AMPLITUDE AND PHASE CONTROL CIRCUITS DESIGNED FOR MULTI-STANDARD WIRELESS COMMUNICATION SYSTEMS A Dissertation Presented to The Academic Faculty by Yan-Yu Huang In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the School of Electrical and Computer Engineering Georgia Institute of Technology August 2011 Copyright© Yan-Yu Huang 2011 CMOS-BASED AMPLITUDE AND PHASE CONTROL CIRCUITS DESIGNED FOR MULTI-STANDARD WIRELESS COMMUNICATION SYSTEMS Approved by: Dr. J. Stevenson Kenney, Advisor Dr. Thomas G. Habetler School of Electrical and Computer School of Electrical and Computer Engineering Engineering Georgia Institute of Technology Georgia Institute of Technology Dr. Kevin T. Kornegay Dr. Paul A. Kohl School of Electrical and Computer School of Chemical and Biomolecular Engineering Engineering Georgia Institute of Technology Georgia Institute of Technology Dr. Chang-Ho Lee Date Approved: June 29, 2011 School of Electrical and Computer Engineering Georgia Institute of Technology 1. ACKNOWLEDGEMENTS I would like to express my gratitude to my advisor, Professor James Stevenson Kenney, for his excellent guidance and all the suggestions that help me conduct the research, solve the problems, and improve my dissertation. I would also like to thank my committee members: Professor Kevin T. Kornegay, Professor Thomas G. Habetler, Professor Paul A. Kohl, and Dr. Chang-Ho Lee for their time in reviewing my dissertation and all the invaluable suggestions. I would also like to express my appreciation to the leaders in various projects I was involved during the past four years, Dr. Joy Laskar, Dr. Chang-Ho Lee, and Dr. Wangmyoong Woo. Their valuable comments on my work and relative knowledge about the project have been a tremendous help to me. -
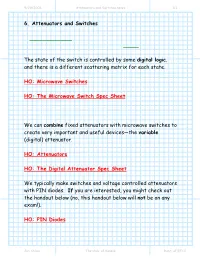
6. Attenuators and Switches the State of the Switch Is Controlled by Some
9/29/2006 Attenuators and Switches notes 1/1 6. Attenuators and Switches The state of the switch is controlled by some digital logic, and there is a different scattering matrix for each state. HO: Microwave Switches HO: The Microwave Switch Spec Sheet We can combine fixed attenuators with microwave switches to create very important and useful devices—the variable (digital) attenuator. HO: Attenuators HO: The Digital Attenuator Spec Sheet We typically make switches and voltage controlled attenuators with PIN diodes. If you are interested, you might check out the handout below (no, this handout below will not be on any exam!). HO: PIN Diodes Jim Stiles The Univ. of Kansas Dept. of EECS 9/29/2006 Microwave Switches 1/4 Microwave Switches Consider an ideal microwave SPDT switch. 1 Z0 3 2 control Z0 The scattering matrix will have one of two forms: ⎡⎤001 ⎡⎤ 000 ==⎢⎥ ⎢⎥ SS13⎢⎥000 23 ⎢⎥ 001 ⎣⎦⎢⎥100 ⎣⎦⎢⎥ 010 where S13 describes the device when port 1 is connected to port 3: 1 Z0 3 2 control Z0 Jim Stiles The Univ. of Kansas Dept. of EECS 9/29/2006 Microwave Switches 2/4 and where S23 describes the device when port 2 is connected to port 3: 1 Z0 3 2 Z control 0 These ideal switches are called matched, or absorptive switches, as ports 1 and 2 remain matched, even when not connected. This is in contrast to a reflective switch, where the disconnected port will be perfectly reflective, i.e., ⎡⎤001⎡e jφ 00⎤ ⎢ ⎥ ==⎢⎥jφ SS13⎢⎥00e 23 ⎢ 001⎥ ⎣⎦⎢⎥100⎣⎢ 010⎦⎥ where of course e jφ = 1. -

! ! ! 4.14 Impedance Transformation Equation
IMPEDANCE TRANSFORMATION EQUATION 101 4.14 IMPEDANCE TRANSFORMATION EQUATION One of the most common tasks in microwave engineering is the determination of how a load impedance ZL is transformed to a new input impedance ZIN by a length of uniform transmission line of characteristic impedance Z0 and electri- cal length y (Fig. 4.14-1). To simplify this derivation, we assume that the line length is lossless. With the choice of x ¼ 0 at the load, the input to the line is at x ¼l, and the input impedance there is jbl Àjbl V ðx ¼lÞ e þ GLe Z Z x l Z 4:14-1 IN ¼ ð ¼Þ¼ ¼ 0 jbl Àjbl ð Þ I ðx ¼lÞ e À GLe jbl Now substitute GL ¼ðZL À Z0Þ=ðZL þ Z0Þ, bl ¼ y, the identities e ¼ cos bl þ j sin bl and eÀjbl ¼ cos bl À j sin bl into (4.14-1), and remove cancel- ing terms to get 2ZL cos y þ j2Z0 sin y ZIN ¼ Z0 2Z0 cos y þ j2ZL sin y ð4:14-2Þ ZL þ jZ0 tan y ZIN ¼ Z0 Z0 þ jZL tan y Similar reasoning can be used to evaluate the input impedance when the trans- mission line has finite losses. The result is ZL þ Z0 tanh gl ZIN ¼ Z0 ð4:14-3Þ Z0 þ ZL tanh gl This is one of the most important equations in microwave engineering and is called the impedance transformation equation. Remarkably, (4.14-2) and (4.14-3) have exactly the same format when derived in terms of admittance. -

Attenuation & Attenuator
ATTENUATION & ATTENUATOR Definitions Attenuation is the reduction in amplitude and intensity of a signal. An attenuator is an electronic device that reduces the amplitude or power of a signal without appreciably distorting its waveform. Basics Attenuation is the reduction in amplitude and intensity of a signal. Signals may be attenuated exponentially by transmission through a medium, in which case attenuation is usually reported in dB with respect to distance traveled through the medium. Attenuation can also be understood to be the opposite of amplification. Attenuation is an important property in telecommunications and ultrasound applications because of its importance in determining signal strength as a function of distance. Attenuation is usually measured in units of decibels per unit length of medium (dB/cm, dB/km, etc) and is represented by the attenuation coefficient of the medium in question. Ultrasound One area of research in which attenuation figures strongly is in ultrasound physics. Attenuation in ultrasound is the reduction in amplitude of the ultrasound beam as a function of distance through the imaging medium. Accounting for attenuation effects in ultrasound is important because a reduced signal amplitude can affect the quality of the image produced. By knowing the attenuation that an ultrasound beam experiences travelling through a medium, one can adjust the input signal amplitude to compensate for any loss of energy at the desired imaging depth. Ultrasound attenuation measurement in heterogeneous systems, like emulsions or colloids yields information on particle size distribution. There is ISO standard on this technique . Ultrasound attenuation can be used for extensional rheology measurement. There are acoustic rheometers that employ Stokes' law for measuring extensional viscosity and volume viscosity. -
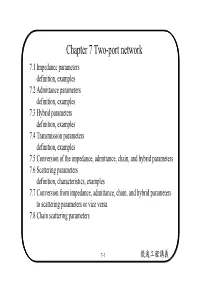
Chapter 7 Two-Port Network
Chapter 7 Two-port network 7.1 Impedance parameters definition, examples 7.2 Admittance parameters definition, examples 7.3 Hybrid parameters definition, examples 7.4 Transmission parameters definition, examples 7.5 Conversion of the impedance, admittance, chain, and hybrid parameters 7.6 Scattering parameters definition, characteristics, examples 7.7 Conversion from impedance, admittance, chain, and hybrid parameters to scattering parameters or vice versa 7.8 Chain scattering parameters 7-1 微波工程講義 7.1 Impedance parameters I1 I2 Basics linear 1. V1 port 1 port 2 V2 network [V ]= [Z ][][]I , I : source, [V ]: response V Z Z I V = Z I + Z I reference reference 1 = 11 12 1 , 1 11 1 12 2 = + plane 1 plane 2 V2 Z 21 Z 22 I 2 V2 Z 21I1 Z 22 I 2 V = 1 Z11 : open - circuit input impedance at port 1 I1 = I2 0 V = 1 Z12 : open - circuit reverse transimpedance I 2 = I1 0 V = 2 Z 21 : open - circuit forward transimpedance I1 = I2 0 V = 2 Z 22 : open - circuit input impedance at port 2 I 2 = I1 0 7-2 微波工程講義 Lecture 4 How to Determine Z Parameters? =⋅+⋅ I = 0 VZIZI11111222 ==VV12 ZZ11 21 =⋅+⋅ II11== VZIZI2211222 II2200 = I1 0 ==VV21 ZZ22 12 II22== II1100 I1=0 I2 Z22 Two Port Reciprocity: O.C. V1 V Network 2 = Z12Z 21 1/9/2003 2 Lecture 4. ELG4105: Microwave Circuits © S. Loyka, Winter 2003 Discussion I1 I2 V 6I = = Ω = 1 = 2 = 1. Ex.7.1 Z11 Z 22 6 , Z12 6 I 2 = I 2 I1 0 6Ω V 6I 6 6 V1 V2 Z = 2 = 1 = 6,[]Z = 21 1 6 6 I1 I =0 I1 2. -

A Practical Guide to Decibels
A Practical Guide to Decibels A Companion to The Art of Electronics Student Manual Lab 2 UCSD Physics 120A David Kleinfeld [email protected], Han Lin [email protected] Simply put, a decibel is a way to express a ratio. §1. Power Ratios We will first consider a ratio of powers. The formula to memorize and take to your deathbed is: Here, the square brackets mean “units of dB”. Notice that this formula is easy to remember because it has lots of tens, hence the “deci-” in “decibels”. Example 1-1: An attenuator is anything that takes in a signal and spits out a weaker one. Consider the attenuator below. How many dB’s of attenuation does this attenuator provide? Figure 1 In this problem, our power ratio is output power over input power, often simply known as power gain . We have learned something important (memorize this!) from the above example: A Practical Guide to Decibels 2 Question 1-1: An amplifier has a power gain of 2 (if you put in one watt, you will get out two watts). How many dB’s of power gain does this amp provide? ANSWER: +3 dB Question 1-2: You have a -10 dB attenuator. What is P out /P in ? ANSWER: 1/10 Figure 2 §2. Voltage Ratios In low frequency electronics, we are typically more concerned with voltages than power. However, the decibel is defined with respect to power. How can we use decibels for voltage ratios? Recalling that P = V 2/R, A Practical Guide to Decibels 3 Example 2-1: An RC filter provides -3 dB of voltage attenuation at a particular frequency. -

Langevin Mixing Console
An Olde School Langevin Mixer Rick Chinn – Uneeda Audio This is a classic mixer with fixed gain blocks, slidewire faders, passive mixing networks, passive equalizers, etc. EVERYTHING IS PATCHED. THERE ARE NO NORMALS. No patch cords, no audio. Call it job security. The patching, etc. IS the mixer's block diagram, engraved right into the front panel. If you’re not comfortable with signal flow concepts, then this might be quite daunting. The signal path is completely minimalist. The origins of the design are straight out of the Langevin catalog, but the notion of putting the one-line block diagram on the panel came from Paul Veneklasen, who was an olde-school acoustician down in Santa Monica CA. He designed several auditoriums with sound systems here in Seattle, and his systems always took the form of multiple panels, with the block diagram engraved on them, so that anyone (knowledgeable) stepping up could figure out how things were connected. Glenn White Jr. worked with Veneklasen on these projects and he did the acoustics for Kearney's new studio on 5th Avenue in Seattle, and designed and built this console to go with it. Revision A.2 8/9/2010 1 The faders are Langevins, as are the equalizers and rotary attenuators, and (of course) the 21 AM-16 amplifiers. Connections that would usually be wired/patched together are located next to each other, but they must be physically patched in order to be connected. EVERYTHING is 600- ohms input and output (sorta). Overview Originally the studio was 3-track, and that's the form that the mixer takes. -

Building the Amplifier Measuring Attenuator Background You Can Use a Sound Card to Measure Amplifier Distortion
Building the Amplifier Measuring Attenuator Background You can use a sound card to measure amplifier distortion. A standard sound card only accepts about 1 volt RMS before it overloads. If you put a much more than 1 volt RMS into the sound card’s A2D, you can damage it. This article describes how to build a combination of a switchable attenuator and protection circuit. The switchable attenuator drops the signal level enough to keep from overloading the A2D. The protection circuit keeps the amp from damaging the A2D no matter which attenuator setting you select. Circuit Description Figure 1 shows the circuit of the switchable attenuator and protector. The amplifier under test connects to the RCA jack on the left side of the schematic. From there, the signal connects to a 6-position selector switch. The attenuation of the switch increases as the selector turns counter-clockwise. Consider what happens when the switch is fully clock-wise. The input signal from the amp under test connects through the (-6) labeled position of the switch, R2 and R1. R2 and R1 form a voltage divider that cuts the signal level in half, an attenuation of -6 dB. The two green LEDs look like open circuits so long as the voltage across them is less than about 1.4 volt. Thus the -6 position can accommodate amplifier outputs of up to about 1 or two volts RMS. If you’ve adjusted the amplifier for more output than 1 or 2 volts RMS, you’ll have to move the switch counter clockwise. In the (-12) position, the signal is applier to R4. -
Highly Linear Attenuator and Mixer for Wide-Band TOR in CMOS
Hind Dafallah Highly Linear Attenuator and Mixer for Wide-Band for Mixer and Attenuator Linear Highly Master’s Thesis Highly Linear Attenuator and Mixer for Wide-Band TOR in CMOS Hind Dafallah TOR in CMOSTOR in Series of Master’s theses Department of Electrical and Information Technology LU/LTH-EIT 2016-507 Department of Electrical and Information Technology, http://www.eit.lth.se Faculty of Engineering, LTH, Lund University, 2016. Printed in Sweden E-huset, Lund, 2016 Abstract In this thesis work, a highly linear passive attenuator and mixer were designed to be used in a wide-band Transmission Observation Receiver (TOR). The TOR is a low IF receiver that accepts RF frequencies from 2GHz to 7GHz, and produces corresponding IF bandwidths of 280MHz to 990MHz respectively, using low side LO injection. The dynamic range is maximized by using passive topologies for both the attenuator and the mixer. The system is dealing with different power levels ranging from -30dBm to +1dBm, and hence, a programmable digital step attenuator is used to attenuate large signals. It provides a maximum of 31dB of attenuation in 1dB steps. Different mixer architectures were compared, including CMOS mixer, mixer with dummy switches and quadrature mixer. Also, the performance of the mixer in both voltage mode and current mode was investigated. A double balanced passive mixer in voltage mode, with dummy switches was adopted in the final system since it proved to be the best in terms of meeting the requirements. The work was carried out in Ericsson in Lund, using Cadence, 65nm process. The circuit is true differential and it uses a supply voltage of 1.2V. -
A/Tee Pretision Attenuators and Networks
ATTENUATORS AND A/teePretision Attenuators and Networks NETWORKS VU Extenders Bridging Pads Rotary Atte nuators Gi- Typical 9200 Seri es A/tee Con sole Utilizing Components from this Catalog Mixing Networks Loss Pad s Straight Line Attenuators ALTEC prec1s,on Attenuators and Networks ar e e ngin ee red in accordance with classic design techniques. The finest materials , combined with exper ienced craftsmanship, give extreme re liabili ty . ALTEC Attenuators and Networks ar e made in three basic cla ssificat ions: ( 1) Fixed (2) Rotary (3) Straight lin e. This catalo g lists 14 differ e nt categori es . Every " Passive Loss" de vice required in the construct ion of professiona l speech input equ ipm ent is now avai labl e from a single source. TABLEOF CONTENTS Pa ge Page Page General I nformoti on 2 Calibrated Grid Cont ro l Pote ntiometers: Rotar y Differential Attenuators: RA8811 Series . 8 Or der ing Information 3 RP8600 -8606, RP8621-8627, RP8640-8643 Series 6 VU Met e r Range Extend e rs: Imp edance Cod e 3 9 Precis ion Deco de Attenua tors: VUS0l0-80 11, VU8700-87 12 Ser ies Straight l ine Atte nuators (Primarily use d in DA8735-8746 Series 7 Mixer Networks: MN8000 Series ........... ............. 10 Mixing Circuit s): SM8272-8281 and SM8324-8327 Series 4 Precision Variable Imp edanc e Matching Fixed l oss Pa ds: LP8000 Series .... 11 7 Rotary Attenuators ( Primari ly used in Network s: PN8747-8754 Ser ies Bridging Pads: BP8000 Series ............. ........... 11 Mixing Circuit s): RM8200-8223 and Motion Pictur e Proj ecti on and Turntable Minimum Loss Matching Pads :. -

RF Diode Design Guide Skyworks Solutions
RF Diode Design Guide Skyworks Solutions Skyworks Solutions, Inc. is an innovator of high reliability analog and mixed signal semiconductors. Leveraging core technologies, Skyworks offers diverse standard and custom linear products supporting automotive, broadband, cellular infrastructure, energy management, industrial, medical, military and mobile handset applications. The Company’s portfolio includes amplifiers, attenuators, detectors, diodes, directional couplers, front-end modules, hybrids, infrastructure RF subsystems, mixers/demodulators, phase shifters, PLLs/synthesizers/VCOs, power dividers/combiners, receivers, switches and technical ceramics. Headquartered in Woburn, Massachusetts, USA, Skyworks is worldwide with engineering, manufacturing, sales and service facilities throughout Asia, Europe and North America. New products are continually being introduced at Skyworks. For the latest information, visit our Web site at www.skyworksinc.com. For additional information, please contact your local sales office or email us [email protected] . The Skyworks Advantage ■ Broad front-end module and precision analog product portfolio ■ Market leadership in key product segments ■ Solutions for all air interface standards, including CDMA2000, GSM/GPRS/EDGE, LTE, WCDMA and WLAN ■ Engagements with a diverse set of top-tier customers ■ Analog, RF and mixed-signal design capabilities ■ Access to all key process technologies: GaAs HBT, PHEMT, BiCMOS, SiGe, CMOS, RF CMOS and Silicon ■ World-class manufacturing capabilities and scale ■ Unparalleled level of customer service and technical support ■ Commitment to technology innovation 2 WWW.SKYWORKSINC.COM Table of Contents About This Guide Proven Performance and Leadership Diode Product Portfolio Overview . 4 As a world-class supplier of RF microwave components for The Radio Transceiver . 5 today’s wireless communication systems, Skyworks continues to deliver the highest performance silicon and GaAs discrete Receiver Protector . -
Ten Essential Skills for Electrical Engineers / Barry L
Contents Cover Title Page Copyright Dedication Preface Acknowledgments About the Author About the Reviewers Note to Instructors ONE SEMESTER COURSE ONE-QUARTER COURSE 1: How to Design Resistive Circuits 1.1 DESIGN OF A RESISTIVE THEVENIN SOURCE 1.2 DESIGN OF A COUPLING CIRCUIT 1.3 DESIGN OF A PI ATTENUATOR PROBLEMS 2 REFERENCES 2: How to Prevent a Power Transistor From Overheating 2.1 ELECTRICAL MODEL FOR HEAT TRANSFER 2.2 USING MANUFACTURER’S DATA FOR THERMAL ANALYSIS 2.3 FORCED-AIR COOLING 2.4 DYNAMIC RESPONSE OF A THERMAL SYSTEM PROBLEMS REFERENCE 3: How to Analyze a Circuit 3.1 FREQUENCY RESPONSE OF A TRANSFER FUNCTION 3.2 FREQUENCY RESPONSE AND IMPEDANCE OF SIMPLE CIRCUITS 3.3 FREQUENCY RESPONSE FOR LADDER NETWORKS 3.4 GENERALIZED TECHNIQUE FOR DETERMINING FREQUENCY RESPONSE PROBLEMS 3 REFERENCES 4: How to Use Statistics to Ensure a Manufacturable Design 4.1 INDEPENDENT COMPONENT FAILURES 4.2 USING THE GAUSSIAN DISTRIBUTION 4.3 SETTING A MANUFACTURING TEST LIMIT 4.4 PROCURING A CUSTOM COMPONENT PROBLEMS REFERENCES 5: How to Design a Feedback Control System 5.1 INTUITIVE DESCRIPTION OF A CONTROL SYSTEM 5.2 REVIEW OF CONTROL SYSTEM OPERATION 5.3 PERFORMANCE OF CONTROL SYSTEMS 5.4 FIRST-ORDER CONTROL SYSTEM DESIGN 5.5 SECOND-ORDER CONTROL SYSTEM DESIGN 5.6 CIRCUIT REALIZATION OF A SECOND-ORDER CONTROL SYSTEM 5.7 FIRST-ORDER DISCRETE CONTROL SYSTEM PROBLEMS 4 REFERENCES 6: How to Work with OP-AMP Circuits 6.1 THE IDEAL OP-AMP 6.2 PRACTICAL OP-AMPS PROBLEMS REFERENCES 7: How to Design Analog Filters 7.1 PASSIVE VERSUS ACTIVE FILTERS 7.2