Conservation of Mass Worksheet Key
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Modeling Conservation of Mass
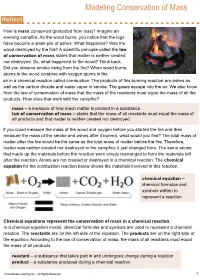
Modeling Conservation of Mass How is mass conserved (protected from loss)? Imagine an evening campfire. As the wood burns, you notice that the logs have become a small pile of ashes. What happened? Was the wood destroyed by the fire? A scientific principle called the law of conservation of mass states that matter is neither created nor destroyed. So, what happened to the wood? Think back. Did you observe smoke rising from the fire? When wood burns, atoms in the wood combine with oxygen atoms in the air in a chemical reaction called combustion. The products of this burning reaction are ashes as well as the carbon dioxide and water vapor in smoke. The gases escape into the air. We also know from the law of conservation of mass that the mass of the reactants must equal the mass of all the products. How does that work with the campfire? mass – a measure of how much matter is present in a substance law of conservation of mass – states that the mass of all reactants must equal the mass of all products and that matter is neither created nor destroyed If you could measure the mass of the wood and oxygen before you started the fire and then measure the mass of the smoke and ashes after it burned, what would you find? The total mass of matter after the fire would be the same as the total mass of matter before the fire. Therefore, matter was neither created nor destroyed in the campfire; it just changed form. The same atoms that made up the materials before the reaction were simply rearranged to form the materials left after the reaction. -

Law of Conversation of Energy
Law of Conservation of Mass: "In any kind of physical or chemical process, mass is neither created nor destroyed - the mass before the process equals the mass after the process." - the total mass of the system does not change, the total mass of the products of a chemical reaction is always the same as the total mass of the original materials. "Physics for scientists and engineers," 4th edition, Vol.1, Raymond A. Serway, Saunders College Publishing, 1996. Ex. 1) When wood burns, mass seems to disappear because some of the products of reaction are gases; if the mass of the original wood is added to the mass of the oxygen that combined with it and if the mass of the resulting ash is added to the mass o the gaseous products, the two sums will turn out exactly equal. 2) Iron increases in weight on rusting because it combines with gases from the air, and the increase in weight is exactly equal to the weight of gas consumed. Out of thousands of reactions that have been tested with accurate chemical balances, no deviation from the law has ever been found. Law of Conversation of Energy: The total energy of a closed system is constant. Matter is neither created nor destroyed – total mass of reactants equals total mass of products You can calculate the change of temp by simply understanding that energy and the mass is conserved - it means that we added the two heat quantities together we can calculate the change of temperature by using the law or measure change of temp and show the conservation of energy E1 + E2 = E3 -> E(universe) = E(System) + E(Surroundings) M1 + M2 = M3 Is T1 + T2 = unknown (No, no law of conservation of temperature, so we have to use the concept of conservation of energy) Total amount of thermal energy in beaker of water in absolute terms as opposed to differential terms (reference point is 0 degrees Kelvin) Knowns: M1, M2, T1, T2 (Kelvin) When add the two together, want to know what T3 and M3 are going to be. -

Key Concepts: Conservation of Mass, Momentum, Energy Fluid: a Material
Key concepts: Conservation of mass, momentum, energy Fluid: a material that deforms continuously and permanently under the application of a shearing stress, no matter how small. Fluids are either gases or liquids. (Under very specialized conditions, a phase of intermediate properties can be stable, but we won’t consider that possibility.) In liquids, the molecules are relatively closely spaced, allowing the magnitude of their (attractive, electrically-based) interaction energy to be of the same magnitude as their kinetic energy. As a result, they exist as a loose collection of clusters. In gases, the molecules are much more widely separated, so the kinetic energy (at a given temperature, identical to that in the liquid) is far greater than the interaction energy (much less than in the liquid), and molecule do not form clusters. In a liquid, the molecules themselves typically occupy a few percent of the total space available; in a gas, they occupy a few thousandths of a percent. Nevertheless, for our purposes, all fluids are considered to be continua (no voids or holes).The absence of significant intermolecular attraction allows gases to fill whatever volume is available to them, whereas the presence of such attraction in liquids prevents them from doing so. The attractive forces in liquid water are unusually strong, compared to other liquids. Properties of Fluids: m Density is mass/volume: ρ = . The density of liquid water is V 3 o −3 3 ~1.0 kg/m ; that of air at 20 C is ~1.2x10 kg/m . mg W Specific weight is weight/volume: γ = = = ρg V V C:\Adata\CLASNOTE\342\Class Notes\Key concepts_Topic 1.doc 1 γ Specific gravity is density normalized to the density of water: sg..= i γ w V 1 Specific volume is volume/mass: V = = m ρ Bulk modulus or modulus of elasticity is the pressure change per dp dp fractional change in volume or density: E =− = . -

Chapter 15 - Fluid Mechanics Thursday, March 24Th
Chapter 15 - Fluid Mechanics Thursday, March 24th •Fluids – Static properties • Density and pressure • Hydrostatic equilibrium • Archimedes principle and buoyancy •Fluid Motion • The continuity equation • Bernoulli’s effect •Demonstration, iClicker and example problems Reading: pages 243 to 255 in text book (Chapter 15) Definitions: Density Pressure, ρ , is defined as force per unit area: Mass M ρ = = [Units – kg.m-3] Volume V Definition of mass – 1 kg is the mass of 1 liter (10-3 m3) of pure water. Therefore, density of water given by: Mass 1 kg 3 −3 ρH O = = 3 3 = 10 kg ⋅m 2 Volume 10− m Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Atmospheric pressure (1 atm.) is equal to 101325 N.m-2. 1 pound per square inch (1 psi) is equal to: 1 psi = 6944 Pa = 0.068 atm 1atm = 14.7 psi Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Pressure in Fluids Pressure, " p, is defined as force per unit area: # Force F p = = [Units – N.m-2, or Pascal (Pa)] " A8" rea A + $ In the presence of gravity, pressure in a static+ 8" fluid increases with depth. " – This allows an upward pressure force " to balance the downward gravitational force. + " $ – This condition is hydrostatic equilibrium. – Incompressible fluids like liquids have constant density; for them, pressure as a function of depth h is p p gh = 0+ρ p0 = pressure at surface " + Pressure in Fluids Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A In the presence of gravity, pressure in a static fluid increases with depth. -

Conservation of Mass
Conservation of mass Henryk Kudela Contents 1 Principle of Conservation of mass. Transport theorem. 1 1 Principle of Conservation of mass. Transport theorem. The conservation of mass principle is one of the most fundamental principles in nature. We are all familiar with this principle, and it is not difficult to understand. As the saying goes: you cannot have your cake and eat it too!. For closed system Ω(t), which we mean a collection of unchanging contents, so all particles move together inside the region Ω(t) with boundary S(t). The mass of the system can be express by the density of fluid: Msys = ρ(x,t) (1) ZΩ(t) The conservation of mass can be express as follows: Definition 1. Let the density ρ(t,x),x ⊂ Ω, be a positive, smooth function and let v be a vector field with with map motion Φ(t,x). We say ρ,v satisfy the principle of conservation of mass if d ρ(t,x) dυ = 0 (2) dt ZΩ(t) The (2) can be rewrite as: d M = 0 (3) dt sys It is worth to emphasize that Ω(t),ρ and v may change with time, but they must do so in a way that leaves Msys unchanged if the conservation of mass is fulfil. Theorem 1. The principle of conservation of mass is satisfied by ρ,v if and only if any of the following equivalent condition hold: d ρ ρ 1. dt + div v = 0 ∂ρ ρ 2. ∂t + div ( v)= 0 1 ∂ ρ υ ρ 3. -

Fluid Properties and the Conservation of Mass Lab Lecture the Week of Sep 21 Lab Held in Marston 10 the Week of Sep 28
9/21/2015 Fluid Properties and the Conservation of Mass Lab Lecture the week of Sep 21 Lab held in Marston 10 the week of Sep 28 In-Lab Rules Must wear : Personal Protective Equipment: lab coat, gloves, goggles Closed-toed shoes and pants Label all vessels (beakers, test tubes, flasks): Contents, date, initials, class When in doubt, label! No food or drink in the lab Safety first Handle chemicals with care, always clean broken glass, don’t put flammables in close proximity to flame 1 9/21/2015 Fluid Properties 1. Density of a substance: the quantity of matter contained in a unit volume of the substance Mass density ρ(kg/m3)=m/V Specific weight ω(N/m3)=ρg Relative density σ=ρs/ρH20 2. Viscosity: property of fluid, due to cohesion and interaction between molecules, which offers resistance to deformation. Dynamic viscosity μ Kinematic viscosity ν Reynold’s Number Ratio of the inertial forces (ρv2/L ) to viscous forces (μv/L2) . Re= ρvL/μ=vL/υ=vD/υ ν=μ/ρ μ is the dynamic viscosity of the fluid (kg/(m.s)), v is the maximum velocity of an object relative to a fluid (m/s) or mean fluid velocity, L is the traveled length of the fluid (m) (the symbol D is used sometimes instead of L as the hydraulic diameter), and υ is kinematic viscosity (m2/s). 2 9/21/2015 Conservation of Mass Antoine Lavoisier’s Law (1789): min m mass is neither created nor Control out volume destroyed: min=mout Qin Qout Objectives Measure the density of water Check fluid velocity using Reynold’s number criterion Estimate terms in conservation of water -

3 Stress and the Balance Principles
3 Stress and the Balance Principles Three basic laws of physics are discussed in this Chapter: (1) The Law of Conservation of Mass (2) The Balance of Linear Momentum (3) The Balance of Angular Momentum together with the conservation of mechanical energy and the principle of virtual work, which are different versions of (2). (2) and (3) involve the concept of stress, which allows one to describe the action of forces in materials. 315 316 Section 3.1 3.1 Conservation of Mass 3.1.1 Mass and Density Mass is a non-negative scalar measure of a body’s tendency to resist a change in motion. Consider a small volume element Δv whose mass is Δm . Define the average density of this volume element by the ratio Δm ρ = (3.1.1) AVE Δv If p is some point within the volume element, then define the spatial mass density at p to be the limiting value of this ratio as the volume shrinks down to the point, Δm ρ(x,t) = lim Spatial Density (3.1.2) Δv→0 Δv In a real material, the incremental volume element Δv must not actually get too small since then the limit ρ would depend on the atomistic structure of the material; the volume is only allowed to decrease to some minimum value which contains a large number of molecules. The spatial mass density is a representative average obtained by having Δv large compared to the atomic scale, but small compared to a typical length scale of the problem under consideration. The density, as with displacement, velocity, and other quantities, is defined for specific particles of a continuum, and is a continuous function of coordinates and time, ρ = ρ(x,t) . -

Introduction to Basic Principles of Fluid Mechanics
2.016 Hydrodynamics Reading #3 2.016 Hydrodynamics Prof. A.H. Techet Introduction to basic principles of fluid mechanics I. Flow Descriptions 1. Lagrangian (following the particle): In rigid body mechanics the motion of a body is described in terms of the body’s position in time. This body can be translating and possibly rotating, but not deforming. This description, following a particle in time, is a Lagrangian description, with velocity vector Vu= i+ v j + wz . (3.1) Using the Lagrangian approach, we can describe a particle located at point xo = (,xyo o, z o ) for some time t = to, such that the particle velocity is ∂x V = , (3.2) ∂t and particle acceleration is ∂V a = . (3.3) ∂t We can use Newton’s Law of motion ( F = ma ) on the body to determine the acceleration and thus, the velocity and position. However, in fluid mechanics, it is difficult to track a single fluid particle. But in the lab we can observe many particles passing by one single location. 2. Eulerian (observing at one location): In the lab, we can easily observe many particles passing a single location, and we can make measurements such as drag on a stationary model as fluid flows past. Thus it is useful to use the Eulerian description, or control volume approach, and describe the flow at every fixed point in space (x,,yz) as a function of time, t . version 3.0 updated 8/30/2005 -1- ©2005 A. Techet 2.016 Hydrodynamics Reading #3 z x w u Figure 1: An Eulerian description gives a velocity vector at every point in x,y,z as a function of time. -
Introduction to Fluid Flow
Stanford University Department of Aeronautics and Astronautics AA200A Applied Aerodynamics Chapter 1 - Introduction to fluid flow Stanford University Department of Aeronautics and Astronautics 1.1 Introduction Compressible flows play a crucial role in a vast variety of man-made and natural phenomena. Propulsion and power systems High speed flight Star formation, evolution and death Geysers and geothermal vents Earth meteor and comet impacts Gas processing and pipeline transfer Sound formation and propagation Stanford University Department of Aeronautics and Astronautics 1.2 Conservation of mass Stanford University Department of Aeronautics and Astronautics Divide through by the volume of the control volume. 1.2.1 Conservation of mass - Incompressible flow If the density is constant the continuity equation reduces to Note that this equation applies to both steady and unsteady incompressible flow Stanford University Department of Aeronautics and Astronautics 1.2.2 Index notation and the Einstein convention Make the following replacements Using index notation the continuity equation is Einstein recognized that such sums from vector calculus always involve a repeated index. For convenience he dropped the summation symbol. Coordinate independent form Stanford University Department of Aeronautics and Astronautics 1.3 Particle paths and streamlines in 2-D steady flow The figure below shows the streamlines over a 2-D airfoil. The flow is irrotational and incompressible Stanford University Department of Aeronautics and Astronautics Streamlines Streaklines Stanford University Department of Aeronautics and Astronautics A vector field that satisfies can always be represented as the gradient of a scalar potential or If the vector potential is substituted into the continuity equation the result is Laplaces equation. -

Fluids – Lecture 6 Notes 1
Fluids – Lecture 6 Notes 1. Control Volumes 2. Mass Conservation 3. Control Volume Applications Reading: Anderson 2.3, 2.4 Control Volumes In developing the equations of aerodynamics we will invoke the firmly established and time- tested physical laws: Conservation of Mass Conservation of Momentum Conservation of Energy Because we are not dealing with isolated point masses, but rather a continuous deformable medium, we will require new conceptual and mathematical techniques to apply these laws correctly. One concept is the control volume, which can be either finite or infinitesimal. Two types of control volumes can be employed: 1) Volume is fixed in space (Eulerian type). Fluid can freely pass through the volume’s boundary. 2) Volume is attached to the fluid (Lagrangian type). Volume is freely carried along with the fluid, and no fluid passes through its boundary. This is essentially the same as the free-body concept employed in solid mechanics. V V Eulerian Control Volume Lagrangian Control Volume fixed in space moving with fluid Both approaches are valid. Here we will focus on the fixed control volume. Mass Conservation Mass flow Consider a small patch of the surface of the fixed, permeable control volume. The patch has 1 area A, and normal unit vectorn ˆ. The plane of fluid particles which are on the surface at time t will move off the surface at time t + ∆t, sweeping out a volume given by ∆V = Vn A ∆t where Vn = V~ · nˆ is the component of the velocity vector normal to the area. V n^ Vn V ^ swept volume n ∆ V ∆ t V t n V ∆ t A A The mass of fluid in this swept volume, which evidently passed through the area during the ∆t interval, is ∆m = ρ ∆V = ρVn A ∆t The mass flow is defined as the time rate of this mass passing though the area. -
Chapter 6 Conservation of Momentum: Fluids and Elastic Solids
Chapter 6 Conservation of Momentum: Fluids and Elastic Solids The description of the motion of fluids plays a fundamental role in applied mathematics. The basic model is a system of partial di↵erential equations of evolution type. 6.1 Equations of Fluid Motion Fluids consists of molecules; thus, on a microscopic level, a fluid is a discrete material. To obtain a useful approximation, we will describe fluid motion on the macroscopic level by taking into account forces that act on a parcel of fluid, which we assume to be a collection of sufficiently many molecules of the fluid so that the continuity assumption is valid. More precisely, we will assume the fluid to be a continuous medium contained in three-dimensional space R3 such that every parcel of the fluid, no matter how small in compar- ison with the whole body of fluid, can be viewed as a continuous material. Mathematically, a parcel of fluid (at every moment of time) is a bounded open subset A of the fluid that is assumed to be in an open set whose closure is the region containing the fluid. To ensure correctness of theR math- ematical operations that follow, we assume that each parcel A has a C1 boundary. At every given moment of time, a particle of fluid is identified with a point in . R Let ⇢ = ⇢(x, t)denotethedensityandu = u(x, t)thevelocityofthefluid at position x and time t R. The motion of the fluid is modeled by 2R 2 257 258 Fluids di↵erential equations for ⇢ and u determined by the fluid’s internal material properties, its container, and the external forces acting on the fluid. -

Lecture 1 Conservation Equations
Summer 2013 Lecture 1 Conservation Equations Moshe Matalon Conservation equations for a pure substance We focus on a material volume Vm(t) (made of the same set of material n n points). d ⇢dV =0 dt Vm(t1) Vm(t2) VZ(t) Mass Conservation The time rate of a change of a quantity φ(x,t) over a given volume V,moving with velocity VI is d @ φdV = dV + φ(V n) dS dt @t I · VZ(t) VZ(t) SZ(t) This is the multidimensional analogue of Leibnitz’s theorem from calculus; it is a kinematic relation, not a law of fluid mechanics. Moshe Matalon Moshe Matalon University of Illinois at Urbana-Champaign 1 Summer 2013 When VI = v,i.e.,theCVmoveswiththefluidvelocity,theresultisthe Reynolds’ transport theorem D @ φdV = dV + φ v n dS Dt @t · VZ(t) VZ(t) S(Zt) D @ φdV = + (φv) dV Dt @t r· ZV(t) ZV(t) ⇢ D Dφ φdV = + φ v dV Dt Dt r· ZV(t) ZV(t) ⇢ and the common notation for the “time rate of change” is D/Dt,theconvective or material derivative. For example: time rate of change of the D⇢ @⇢ = + v ⇢ density of a fluid particle Dt @t ·r acceleration of a fluid Dv @v = + v v particle Dt @t ·r Moshe Matalon Conservation of mass D @⇢ ⇢dV =0 + ⇢v dV =0 Dt @t r· ZV(t) ) ZV ⇢ @⇢ + ⇢v =0 @t r· @⇢ + v ⇢ +⇢ v =0 D⇢ @t ·r r· + ⇢ v =0 ) Dt r· D⇢/Dt | {z } 1 D⇢ v = r· −⇢ Dt rate of compression or rate of dilation D⇢ =0 v =0 Dt )r· Moshe Matalon Moshe Matalon University of Illinois at Urbana-Champaign 2 Summer 2013 Conservation of momentum Newton’s second law can be applied directly to a material C.V.