A Mathematical Framework for Finite Strain Elastoplastic Consolidation Part 1: Balance Laws, Variational Formulation, and Linearization Ronaldo I
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Equation of State for the Lennard-Jones Fluid
Equation of State for the Lennard-Jones Fluid Monika Thol1*, Gabor Rutkai2, Andreas Köster2, Rolf Lustig3, Roland Span1, Jadran Vrabec2 1Lehrstuhl für Thermodynamik, Ruhr-Universität Bochum, Universitätsstraße 150, 44801 Bochum, Germany 2Lehrstuhl für Thermodynamik und Energietechnik, Universität Paderborn, Warburger Straße 100, 33098 Paderborn, Germany 3Department of Chemical and Biomedical Engineering, Cleveland State University, Cleveland, Ohio 44115, USA Abstract An empirical equation of state correlation is proposed for the Lennard-Jones model fluid. The equation in terms of the Helmholtz energy is based on a large molecular simulation data set and thermal virial coefficients. The underlying data set consists of directly simulated residual Helmholtz energy derivatives with respect to temperature and density in the canonical ensemble. Using these data introduces a new methodology for developing equations of state from molecular simulation data. The correlation is valid for temperatures 0.5 < T/Tc < 7 and pressures up to p/pc = 500. Extensive comparisons to simulation data from the literature are made. The accuracy and extrapolation behavior is better than for existing equations of state. Key words: equation of state, Helmholtz energy, Lennard-Jones model fluid, molecular simulation, thermodynamic properties _____________ *E-mail: [email protected] Content Content ....................................................................................................................................... 2 List of Tables ............................................................................................................................. -
Modeling Conservation of Mass
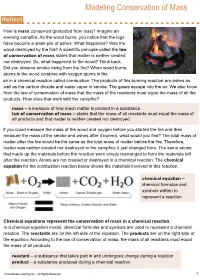
Modeling Conservation of Mass How is mass conserved (protected from loss)? Imagine an evening campfire. As the wood burns, you notice that the logs have become a small pile of ashes. What happened? Was the wood destroyed by the fire? A scientific principle called the law of conservation of mass states that matter is neither created nor destroyed. So, what happened to the wood? Think back. Did you observe smoke rising from the fire? When wood burns, atoms in the wood combine with oxygen atoms in the air in a chemical reaction called combustion. The products of this burning reaction are ashes as well as the carbon dioxide and water vapor in smoke. The gases escape into the air. We also know from the law of conservation of mass that the mass of the reactants must equal the mass of all the products. How does that work with the campfire? mass – a measure of how much matter is present in a substance law of conservation of mass – states that the mass of all reactants must equal the mass of all products and that matter is neither created nor destroyed If you could measure the mass of the wood and oxygen before you started the fire and then measure the mass of the smoke and ashes after it burned, what would you find? The total mass of matter after the fire would be the same as the total mass of matter before the fire. Therefore, matter was neither created nor destroyed in the campfire; it just changed form. The same atoms that made up the materials before the reaction were simply rearranged to form the materials left after the reaction. -

1 Fluid Flow Outline Fundamentals of Rheology
Fluid Flow Outline • Fundamentals and applications of rheology • Shear stress and shear rate • Viscosity and types of viscometers • Rheological classification of fluids • Apparent viscosity • Effect of temperature on viscosity • Reynolds number and types of flow • Flow in a pipe • Volumetric and mass flow rate • Friction factor (in straight pipe), friction coefficient (for fittings, expansion, contraction), pressure drop, energy loss • Pumping requirements (overcoming friction, potential energy, kinetic energy, pressure energy differences) 2 Fundamentals of Rheology • Rheology is the science of deformation and flow – The forces involved could be tensile, compressive, shear or bulk (uniform external pressure) • Food rheology is the material science of food – This can involve fluid or semi-solid foods • A rheometer is used to determine rheological properties (how a material flows under different conditions) – Viscometers are a sub-set of rheometers 3 1 Applications of Rheology • Process engineering calculations – Pumping requirements, extrusion, mixing, heat transfer, homogenization, spray coating • Determination of ingredient functionality – Consistency, stickiness etc. • Quality control of ingredients or final product – By measurement of viscosity, compressive strength etc. • Determination of shelf life – By determining changes in texture • Correlations to sensory tests – Mouthfeel 4 Stress and Strain • Stress: Force per unit area (Units: N/m2 or Pa) • Strain: (Change in dimension)/(Original dimension) (Units: None) • Strain rate: Rate -

Law of Conversation of Energy
Law of Conservation of Mass: "In any kind of physical or chemical process, mass is neither created nor destroyed - the mass before the process equals the mass after the process." - the total mass of the system does not change, the total mass of the products of a chemical reaction is always the same as the total mass of the original materials. "Physics for scientists and engineers," 4th edition, Vol.1, Raymond A. Serway, Saunders College Publishing, 1996. Ex. 1) When wood burns, mass seems to disappear because some of the products of reaction are gases; if the mass of the original wood is added to the mass of the oxygen that combined with it and if the mass of the resulting ash is added to the mass o the gaseous products, the two sums will turn out exactly equal. 2) Iron increases in weight on rusting because it combines with gases from the air, and the increase in weight is exactly equal to the weight of gas consumed. Out of thousands of reactions that have been tested with accurate chemical balances, no deviation from the law has ever been found. Law of Conversation of Energy: The total energy of a closed system is constant. Matter is neither created nor destroyed – total mass of reactants equals total mass of products You can calculate the change of temp by simply understanding that energy and the mass is conserved - it means that we added the two heat quantities together we can calculate the change of temperature by using the law or measure change of temp and show the conservation of energy E1 + E2 = E3 -> E(universe) = E(System) + E(Surroundings) M1 + M2 = M3 Is T1 + T2 = unknown (No, no law of conservation of temperature, so we have to use the concept of conservation of energy) Total amount of thermal energy in beaker of water in absolute terms as opposed to differential terms (reference point is 0 degrees Kelvin) Knowns: M1, M2, T1, T2 (Kelvin) When add the two together, want to know what T3 and M3 are going to be. -

Chapter 3 Equations of State
Chapter 3 Equations of State The simplest way to derive the Helmholtz function of a fluid is to directly integrate the equation of state with respect to volume (Sadus, 1992a, 1994). An equation of state can be applied to either vapour-liquid or supercritical phenomena without any conceptual difficulties. Therefore, in addition to liquid-liquid and vapour -liquid properties, it is also possible to determine transitions between these phenomena from the same inputs. All of the physical properties of the fluid except ideal gas are also simultaneously calculated. Many equations of state have been proposed in the literature with either an empirical, semi- empirical or theoretical basis. Comprehensive reviews can be found in the works of Martin (1979), Gubbins (1983), Anderko (1990), Sandler (1994), Economou and Donohue (1996), Wei and Sadus (2000) and Sengers et al. (2000). The van der Waals equation of state (1873) was the first equation to predict vapour-liquid coexistence. Later, the Redlich-Kwong equation of state (Redlich and Kwong, 1949) improved the accuracy of the van der Waals equation by proposing a temperature dependence for the attractive term. Soave (1972) and Peng and Robinson (1976) proposed additional modifications of the Redlich-Kwong equation to more accurately predict the vapour pressure, liquid density, and equilibria ratios. Guggenheim (1965) and Carnahan and Starling (1969) modified the repulsive term of van der Waals equation of state and obtained more accurate expressions for hard sphere systems. Christoforakos and Franck (1986) modified both the attractive and repulsive terms of van der Waals equation of state. Boublik (1981) extended the Carnahan-Starling hard sphere term to obtain an accurate equation for hard convex geometries. -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

Two-Way Fluid–Solid Interaction Analysis for a Horizontal Axis Marine Current Turbine with LES
water Article Two-Way Fluid–Solid Interaction Analysis for a Horizontal Axis Marine Current Turbine with LES Jintong Gu 1,2, Fulin Cai 1,*, Norbert Müller 2, Yuquan Zhang 3 and Huixiang Chen 2,4 1 College of Water Conservancy and Hydropower Engineering, Hohai University, Nanjing 210098, China; [email protected] 2 Department of Mechanical Engineering, Michigan State University, East Lansing, MI 48824, USA; [email protected] (N.M.); [email protected] (H.C.) 3 College of Energy and Electrical Engineering, Hohai University, Nanjing 210098, China; [email protected] 4 College of Agricultural Engineering, Hohai University, Nanjing 210098, China * Correspondence: fl[email protected]; Tel.: +86-139-5195-1792 Received: 2 September 2019; Accepted: 23 December 2019; Published: 27 December 2019 Abstract: Operating in the harsh marine environment, fluctuating loads due to the surrounding turbulence are important for fatigue analysis of marine current turbines (MCTs). The large eddy simulation (LES) method was implemented to analyze the two-way fluid–solid interaction (FSI) for an MCT. The objective was to afford insights into the hydrodynamics near the rotor and in the wake, the deformation of rotor blades, and the interaction between the solid and fluid field. The numerical fluid simulation results showed good agreement with the experimental data and the influence of the support on the power coefficient and blade vibration. The impact of the blade displacement on the MCT performance was quantitatively analyzed. Besides the root, the highest stress was located near the middle of the blade. The findings can inform the design of MCTs for enhancing robustness and survivability. -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
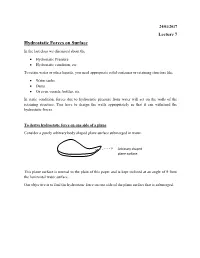
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics). -

Key Concepts: Conservation of Mass, Momentum, Energy Fluid: a Material
Key concepts: Conservation of mass, momentum, energy Fluid: a material that deforms continuously and permanently under the application of a shearing stress, no matter how small. Fluids are either gases or liquids. (Under very specialized conditions, a phase of intermediate properties can be stable, but we won’t consider that possibility.) In liquids, the molecules are relatively closely spaced, allowing the magnitude of their (attractive, electrically-based) interaction energy to be of the same magnitude as their kinetic energy. As a result, they exist as a loose collection of clusters. In gases, the molecules are much more widely separated, so the kinetic energy (at a given temperature, identical to that in the liquid) is far greater than the interaction energy (much less than in the liquid), and molecule do not form clusters. In a liquid, the molecules themselves typically occupy a few percent of the total space available; in a gas, they occupy a few thousandths of a percent. Nevertheless, for our purposes, all fluids are considered to be continua (no voids or holes).The absence of significant intermolecular attraction allows gases to fill whatever volume is available to them, whereas the presence of such attraction in liquids prevents them from doing so. The attractive forces in liquid water are unusually strong, compared to other liquids. Properties of Fluids: m Density is mass/volume: ρ = . The density of liquid water is V 3 o −3 3 ~1.0 kg/m ; that of air at 20 C is ~1.2x10 kg/m . mg W Specific weight is weight/volume: γ = = = ρg V V C:\Adata\CLASNOTE\342\Class Notes\Key concepts_Topic 1.doc 1 γ Specific gravity is density normalized to the density of water: sg..= i γ w V 1 Specific volume is volume/mass: V = = m ρ Bulk modulus or modulus of elasticity is the pressure change per dp dp fractional change in volume or density: E =− = . -

Navier-Stokes Equations Some Background
Navier-Stokes Equations Some background: Claude-Louis Navier was a French engineer and physicist who specialized in mechanics Navier formulated the general theory of elasticity in a mathematically usable form (1821), making it available to the field of construction with sufficient accuracy for the first time. In 1819 he succeeded in determining the zero line of mechanical stress, finally correcting Galileo Galilei's incorrect results, and in 1826 he established the elastic modulus as a property of materials independent of the second moment of area. Navier is therefore often considered to be the founder of modern structural analysis. His major contribution however remains the Navier–Stokes equations (1822), central to fluid mechanics. His name is one of the 72 names inscribed on the Eiffel Tower Sir George Gabriel Stokes was an Irish physicist and mathematician. Born in Ireland, Stokes spent all of his career at the University of Cambridge, where he served as Lucasian Professor of Mathematics from 1849 until his death in 1903. In physics, Stokes made seminal contributions to fluid dynamics (including the Navier–Stokes equations) and to physical optics. In mathematics he formulated the first version of what is now known as Stokes's theorem and contributed to the theory of asymptotic expansions. He served as secretary, then president, of the Royal Society of London The stokes, a unit of kinematic viscosity, is named after him. Navier Stokes Equation: the simplest form, where is the fluid velocity vector, is the fluid pressure, and is the fluid density, is the kinematic viscosity, and ∇2 is the Laplacian operator. -

Ductile Deformation - Concepts of Finite Strain
327 Ductile deformation - Concepts of finite strain Deformation includes any process that results in a change in shape, size or location of a body. A solid body subjected to external forces tends to move or change its displacement. These displacements can involve four distinct component patterns: - 1) A body is forced to change its position; it undergoes translation. - 2) A body is forced to change its orientation; it undergoes rotation. - 3) A body is forced to change size; it undergoes dilation. - 4) A body is forced to change shape; it undergoes distortion. These movement components are often described in terms of slip or flow. The distinction is scale- dependent, slip describing movement on a discrete plane, whereas flow is a penetrative movement that involves the whole of the rock. The four basic movements may be combined. - During rigid body deformation, rocks are translated and/or rotated but the original size and shape are preserved. - If instead of moving, the body absorbs some or all the forces, it becomes stressed. The forces then cause particle displacement within the body so that the body changes its shape and/or size; it becomes deformed. Deformation describes the complete transformation from the initial to the final geometry and location of a body. Deformation produces discontinuities in brittle rocks. In ductile rocks, deformation is macroscopically continuous, distributed within the mass of the rock. Instead, brittle deformation essentially involves relative movements between undeformed (but displaced) blocks. Finite strain jpb, 2019 328 Strain describes the non-rigid body deformation, i.e. the amount of movement caused by stresses between parts of a body.