Chapter 6 Conservation of Momentum: Fluids and Elastic Solids
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Quantum Mechanics and Relativity): 21St Century Analysis
Noname manuscript No. (will be inserted by the editor) Joule's 19th Century Energy Conservation Meta-Law and the 20th Century Physics (Quantum Mechanics and Relativity): 21st Century Analysis Vladik Kreinovich · Olga Kosheleva Received: December 22, 2019 / Accepted: date Abstract Joule's Energy Conservation Law was the first \meta-law": a gen- eral principle that all physical equations must satisfy. It has led to many important and useful physical discoveries. However, a recent analysis seems to indicate that this meta-law is inconsistent with other principles { such as the existence of free will. We show that this conclusion about inconsistency is based on a seemingly reasonable { but simplified { analysis of the situation. We also show that a more detailed mathematical and physical analysis of the situation reveals that not only Joule's principle remains true { it is actually strengthened: it is no longer a principle that all physical theories should satisfy { it is a principle that all physical theories do satisfy. Keywords Joule · Energy Conservation Law · Free will · General Relativity · Planck's constant 1 Introduction Joule's Energy Conservation Law: historically the first meta-law. Throughout the centuries, physicists have been trying to come up with equa- tions and laws that describe different physical phenomenon. Before Joule, how- ever, there were no general principles that restricted such equations. James Joule showed, in [13{15], that different physical phenomena are inter-related, and that there is a general principle covering all the phenom- This work was supported in part by the US National Science Foundation grants 1623190 (A Model of Change for Preparing a New Generation for Professional Practice in Computer Science) and HRD-1242122 (Cyber-ShARE Center of Excellence). -
Modeling Conservation of Mass
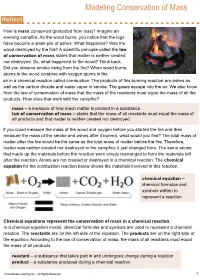
Modeling Conservation of Mass How is mass conserved (protected from loss)? Imagine an evening campfire. As the wood burns, you notice that the logs have become a small pile of ashes. What happened? Was the wood destroyed by the fire? A scientific principle called the law of conservation of mass states that matter is neither created nor destroyed. So, what happened to the wood? Think back. Did you observe smoke rising from the fire? When wood burns, atoms in the wood combine with oxygen atoms in the air in a chemical reaction called combustion. The products of this burning reaction are ashes as well as the carbon dioxide and water vapor in smoke. The gases escape into the air. We also know from the law of conservation of mass that the mass of the reactants must equal the mass of all the products. How does that work with the campfire? mass – a measure of how much matter is present in a substance law of conservation of mass – states that the mass of all reactants must equal the mass of all products and that matter is neither created nor destroyed If you could measure the mass of the wood and oxygen before you started the fire and then measure the mass of the smoke and ashes after it burned, what would you find? The total mass of matter after the fire would be the same as the total mass of matter before the fire. Therefore, matter was neither created nor destroyed in the campfire; it just changed form. The same atoms that made up the materials before the reaction were simply rearranged to form the materials left after the reaction. -

Noether's Theorems and Gauge Symmetries
Noether’s Theorems and Gauge Symmetries Katherine Brading St. Hugh’s College, Oxford, OX2 6LE [email protected] and Harvey R. Brown Sub-faculty of Philosophy, University of Oxford, 10 Merton Street, Oxford OX1 4JJ [email protected] August 2000 Consideration of the Noether variational problem for any theory whose action is invariant under global and/or local gauge transformations leads to three distinct the- orems. These include the familiar Noether theorem, but also two equally important but much less well-known results. We present, in a general form, all the main results relating to the Noether variational problem for gauge theories, and we show the rela- tionships between them. These results hold for both Abelian and non-Abelian gauge theories. 1 Introduction There is widespread confusion over the role of Noether’s theorem in the case of local gauge symmetries,1 as pointed out in this journal by Karatas and Kowalski (1990), and Al-Kuwari and Taha (1991).2 In our opinion, the main reason for the confusion is failure to appreciate that Noether offered two theorems in her 1918 work. One theorem applies to symmetries associated with finite dimensional arXiv:hep-th/0009058v1 8 Sep 2000 Lie groups (global symmetries), and the other to symmetries associated with infinite dimensional Lie groups (local symmetries); the latter theorem has been widely forgotten. Knowledge of Noether’s ‘second theorem’ helps to clarify the significance of the results offered by Al-Kuwari and Taha for local gauge sym- metries, along with other important and related work such as that of Bergmann (1949), Trautman (1962), Utiyama (1956, 1959), and Weyl (1918, 1928/9). -

Derivation of Fluid Flow Equations
TPG4150 Reservoir Recovery Techniques 2017 1 Fluid Flow Equations DERIVATION OF FLUID FLOW EQUATIONS Review of basic steps Generally speaking, flow equations for flow in porous materials are based on a set of mass, momentum and energy conservation equations, and constitutive equations for the fluids and the porous material involved. For simplicity, we will in the following assume isothermal conditions, so that we not have to involve an energy conservation equation. However, in cases of changing reservoir temperature, such as in the case of cold water injection into a warmer reservoir, this may be of importance. Below, equations are initially described for single phase flow in linear, one- dimensional, horizontal systems, but are later on extended to multi-phase flow in two and three dimensions, and to other coordinate systems. Conservation of mass Consider the following one dimensional rod of porous material: Mass conservation may be formulated across a control element of the slab, with one fluid of density ρ is flowing through it at a velocity u: u ρ Δx The mass balance for the control element is then written as: ⎧Mass into the⎫ ⎧Mass out of the ⎫ ⎧ Rate of change of mass⎫ ⎨ ⎬ − ⎨ ⎬ = ⎨ ⎬ , ⎩element at x ⎭ ⎩element at x + Δx⎭ ⎩ inside the element ⎭ or ∂ {uρA} − {uρA} = {φAΔxρ}. x x+ Δx ∂t Dividing by Δx, and taking the limit as Δx approaches zero, we get the conservation of mass, or continuity equation: ∂ ∂ − (Aρu) = (Aφρ). ∂x ∂t For constant cross sectional area, the continuity equation simplifies to: ∂ ∂ − (ρu) = (φρ) . ∂x ∂t Next, we need to replace the velocity term by an equation relating it to pressure gradient and fluid and rock properties, and the density and porosity terms by appropriate pressure dependent functions. -

Law of Conversation of Energy
Law of Conservation of Mass: "In any kind of physical or chemical process, mass is neither created nor destroyed - the mass before the process equals the mass after the process." - the total mass of the system does not change, the total mass of the products of a chemical reaction is always the same as the total mass of the original materials. "Physics for scientists and engineers," 4th edition, Vol.1, Raymond A. Serway, Saunders College Publishing, 1996. Ex. 1) When wood burns, mass seems to disappear because some of the products of reaction are gases; if the mass of the original wood is added to the mass of the oxygen that combined with it and if the mass of the resulting ash is added to the mass o the gaseous products, the two sums will turn out exactly equal. 2) Iron increases in weight on rusting because it combines with gases from the air, and the increase in weight is exactly equal to the weight of gas consumed. Out of thousands of reactions that have been tested with accurate chemical balances, no deviation from the law has ever been found. Law of Conversation of Energy: The total energy of a closed system is constant. Matter is neither created nor destroyed – total mass of reactants equals total mass of products You can calculate the change of temp by simply understanding that energy and the mass is conserved - it means that we added the two heat quantities together we can calculate the change of temperature by using the law or measure change of temp and show the conservation of energy E1 + E2 = E3 -> E(universe) = E(System) + E(Surroundings) M1 + M2 = M3 Is T1 + T2 = unknown (No, no law of conservation of temperature, so we have to use the concept of conservation of energy) Total amount of thermal energy in beaker of water in absolute terms as opposed to differential terms (reference point is 0 degrees Kelvin) Knowns: M1, M2, T1, T2 (Kelvin) When add the two together, want to know what T3 and M3 are going to be. -

Oil and Gas Conservation Law in Review
The Pennsylvania Oil and Gas Conservation Law: A Summary of the Statutory Provisions 58 P.S. §§ 401-419 (March 2009) Prepared by Anna M. Clovis, Research Assistant Under the Supervision of Ross H. Pifer, J.D., LL.M., Director The Agricultural Law Resource and Reference Center Penn State Dickinson School of Law http://www.dsl.psu.edu/centers/aglaw.cfm The Oil and Gas Conservation Law (OGC Law) is one of the primary laws that regulate the extraction of natural gas in Pennsylvania. The OGC Law has been summarized in a section- by-section manner in this research publication, which provides an overview of the issues regulated by the OGC Law. To obtain detailed information on the individual statutory sections, the full text of the OGC Law should be reviewed. Declaration of Policy The OGC Law reflects a policy “to foster, encourage, and promote the development, production, and utilization” of Pennsylvania’s oil and natural gas resources. Development activities should occur in a manner to prevent the waste of oil and natural gas. Oil and natural gas operations should be regulated to ensure that “the Commonwealth shall realize and enjoy the maximum benefit of these natural resources.” Since strata above the Onondaga horizon have been extensively developed since 1850, it would be impractical to include shallow wells within the regulations of the OGC Law. Section 1: Short Title (58 P.S. § 401) This statute shall be known as the “Oil and Gas Conservation Law.” Section 2: Definitions (58 P.S. § 402) This section provides statutory definitions for various oil and gas terms used in the OGC Law. -

Application of Axiomatic Formal Theory to the Abraham--Minkowski
Application of axiomatic formal theory to the Abraham{Minkowski controversy Michael E. Crenshaw∗ Charles M. Bowden Research Laboratory, US Army Combat Capabilities Development Command (DEVCOM) - Aviation and Missile Center, Redstone Arsenal, AL 35898, USA (Dated: August 23, 2019) A transparent linear dielectric in free space that is illuminated by a finite quasimonochromatic field is a thermodynamically closed system. The energy{momentum tensor that is derived from Maxwellian continuum electrodynamics for this closed system is inconsistent with conservation of momentum; that is the foundational issue of the century-old Abraham{Minkowski controversy. The long-standing resolution of the Abraham{Minkowski controversy is to view continuum electrodynam- ics as a subsystem and write the total energy{momentum tensor as the sum of an electromagnetic energy{momentum tensor and a phenomenological material energy{momentum tensor. We prove that if we add a material energy{momentum tensor to the electromagnetic energy{momentum ten- sor, in the prescribed manner, then the total energy, the total linear momentum, and the total angular momentum are constant in time, but other aspects of the conservation laws are violated. Specifically, the four-divergence of the total (electromagnetic plus material) energy{momentum ten- sor is self-inconsistent and violates Poynting's theorem. Then, the widely accepted resolution of the Abraham{Minkowski dilemma is proven to be manifestly false. The fundamental physical principles of electrodynamics, conservation laws, and special relativity are intrinsic to the vacuum; the ex- tant dielectric versions of physical principles are non-fundamental extrapolations from the vacuum theory. Because the resolution of the Abraham{Minkowski momentum controversy is proven false, the extant theoretical treatments of macroscopic continuum electrodynamics, dielectric special rel- ativity, and energy{momentum conservation in a simple linear dielectric are mutually inconsistent for macroscopic fields in matter. -

Key Concepts: Conservation of Mass, Momentum, Energy Fluid: a Material
Key concepts: Conservation of mass, momentum, energy Fluid: a material that deforms continuously and permanently under the application of a shearing stress, no matter how small. Fluids are either gases or liquids. (Under very specialized conditions, a phase of intermediate properties can be stable, but we won’t consider that possibility.) In liquids, the molecules are relatively closely spaced, allowing the magnitude of their (attractive, electrically-based) interaction energy to be of the same magnitude as their kinetic energy. As a result, they exist as a loose collection of clusters. In gases, the molecules are much more widely separated, so the kinetic energy (at a given temperature, identical to that in the liquid) is far greater than the interaction energy (much less than in the liquid), and molecule do not form clusters. In a liquid, the molecules themselves typically occupy a few percent of the total space available; in a gas, they occupy a few thousandths of a percent. Nevertheless, for our purposes, all fluids are considered to be continua (no voids or holes).The absence of significant intermolecular attraction allows gases to fill whatever volume is available to them, whereas the presence of such attraction in liquids prevents them from doing so. The attractive forces in liquid water are unusually strong, compared to other liquids. Properties of Fluids: m Density is mass/volume: ρ = . The density of liquid water is V 3 o −3 3 ~1.0 kg/m ; that of air at 20 C is ~1.2x10 kg/m . mg W Specific weight is weight/volume: γ = = = ρg V V C:\Adata\CLASNOTE\342\Class Notes\Key concepts_Topic 1.doc 1 γ Specific gravity is density normalized to the density of water: sg..= i γ w V 1 Specific volume is volume/mass: V = = m ρ Bulk modulus or modulus of elasticity is the pressure change per dp dp fractional change in volume or density: E =− = . -

Continuity Equation in Pressure Coordinates
Continuity Equation in Pressure Coordinates Here we will derive the continuity equation from the principle that mass is conserved for a parcel following the fluid motion (i.e., there is no flow across the boundaries of the parcel). This implies that δxδyδp δM = ρ δV = ρ δxδyδz = − g is conserved following the fluid motion: 1 d(δM ) = 0 δM dt 1 d()δM = 0 δM dt g d ⎛ δxδyδp ⎞ ⎜ ⎟ = 0 δxδyδp dt ⎝ g ⎠ 1 ⎛ d(δp) d(δy) d(δx)⎞ ⎜δxδy +δxδp +δyδp ⎟ = 0 δxδyδp ⎝ dt dt dt ⎠ 1 ⎛ dp ⎞ 1 ⎛ dy ⎞ 1 ⎛ dx ⎞ δ ⎜ ⎟ + δ ⎜ ⎟ + δ ⎜ ⎟ = 0 δp ⎝ dt ⎠ δy ⎝ dt ⎠ δx ⎝ dt ⎠ Taking the limit as δx, δy, δp → 0, ∂u ∂v ∂ω Continuity equation + + = 0 in pressure ∂x ∂y ∂p coordinates 1 Determining Vertical Velocities • Typical large-scale vertical motions in the atmosphere are of the order of 0. 01-01m/s0.1 m/s. • Such motions are very difficult, if not impossible, to measure directly. Typical observational errors for wind measurements are ~1 m/s. • Quantitative estimates of vertical velocity must be inferred from quantities that can be directly measured with sufficient accuracy. Vertical Velocity in P-Coordinates The equivalent of the vertical velocity in p-coordinates is: dp ∂p r ∂p ω = = +V ⋅∇p + w dt ∂t ∂z Based on a scaling of the three terms on the r.h.s., the last term is at least an order of magnitude larger than the other two. Making the hydrostatic approximation yields ∂p ω ≈ w = −ρgw ∂z Typical large-scale values: for w, 0.01 m/s = 1 cm/s for ω, 0.1 Pa/s = 1 μbar/s 2 The Kinematic Method By integrating the continuity equation in (x,y,p) coordinates, ω can be obtained from the mean divergence in a layer: ⎛ ∂u ∂v ⎞ ∂ω ⎜ + ⎟ + = 0 continuity equation in (x,y,p) coordinates ⎝ ∂x ∂y ⎠ p ∂p p2 p2 ⎛ ∂u ∂v ⎞ ∂ω = − ⎜ + ⎟ ∂p rearrange and integrate over the layer ∫p ∫ ⎜ ⎟ 1 ∂x ∂y p1⎝ ⎠ p ⎛ ∂u ∂v ⎞ ω(p )−ω(p ) = (p − p )⎜ + ⎟ overbar denotes pressure- 2 1 1 2 ⎜ ⎟ weighted vertical average ⎝ ∂x ∂y ⎠ p To determine vertical motion at a pressure level p2, assume that p1 = surface pressure and there is no vertical motion at the surface. -

Newtonian Mechanics Is Most Straightforward in Its Formulation and Is Based on Newton’S Second Law
CLASSICAL MECHANICS D. A. Garanin September 30, 2015 1 Introduction Mechanics is part of physics studying motion of material bodies or conditions of their equilibrium. The latter is the subject of statics that is important in engineering. General properties of motion of bodies regardless of the source of motion (in particular, the role of constraints) belong to kinematics. Finally, motion caused by forces or interactions is the subject of dynamics, the biggest and most important part of mechanics. Concerning systems studied, mechanics can be divided into mechanics of material points, mechanics of rigid bodies, mechanics of elastic bodies, and mechanics of fluids: hydro- and aerodynamics. At the core of each of these areas of mechanics is the equation of motion, Newton's second law. Mechanics of material points is described by ordinary differential equations (ODE). One can distinguish between mechanics of one or few bodies and mechanics of many-body systems. Mechanics of rigid bodies is also described by ordinary differential equations, including positions and velocities of their centers and the angles defining their orientation. Mechanics of elastic bodies and fluids (that is, mechanics of continuum) is more compli- cated and described by partial differential equation. In many cases mechanics of continuum is coupled to thermodynamics, especially in aerodynamics. The subject of this course are systems described by ODE, including particles and rigid bodies. There are two limitations on classical mechanics. First, speeds of the objects should be much smaller than the speed of light, v c, otherwise it becomes relativistic mechanics. Second, the bodies should have a sufficiently large mass and/or kinetic energy. -

Chapter 3 Newtonian Fluids
CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Chapter 3: Newtonian Fluids CM4650 Polymer Rheology Michigan Tech Navier-Stokes Equation v vv p 2 v g t 1 © Faith A. Morrison, Michigan Tech U. Chapter 3: Newtonian Fluid Mechanics TWO GOALS •Derive governing equations (mass and momentum balances •Solve governing equations for velocity and stress fields QUICK START V W x First, before we get deep into 2 v (x ) H derivation, let’s do a Navier-Stokes 1 2 x1 problem to get you started in the x3 mechanics of this type of problem solving. 2 © Faith A. Morrison, Michigan Tech U. 1 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics EXAMPLE: Drag flow between infinite parallel plates •Newtonian •steady state •incompressible fluid •very wide, long V •uniform pressure W x2 v1(x2) H x1 x3 3 EXAMPLE: Poiseuille flow between infinite parallel plates •Newtonian •steady state •Incompressible fluid •infinitely wide, long W x2 2H x1 x3 v (x ) x1=0 1 2 x1=L p=Po p=PL 4 2 CM4650 Chapter 3 Newtonian Fluid 2/5/2018 Mechanics Engineering Quantities of In more complex flows, we can use Interest general expressions that work in all cases. (any flow) volumetric ⋅ flow rate ∬ ⋅ | average 〈 〉 velocity ∬ Using the general formulas will Here, is the outwardly pointing unit normal help prevent errors. of ; it points in the direction “through” 5 © Faith A. Morrison, Michigan Tech U. The stress tensor was Total stress tensor, Π: invented to make the calculation of fluid stress easier. Π ≡ b (any flow, small surface) dS nˆ Force on the S ⋅ Π surface V (using the stress convention of Understanding Rheology) Here, is the outwardly pointing unit normal of ; it points in the direction “through” 6 © Faith A. -

Chapter 15 - Fluid Mechanics Thursday, March 24Th
Chapter 15 - Fluid Mechanics Thursday, March 24th •Fluids – Static properties • Density and pressure • Hydrostatic equilibrium • Archimedes principle and buoyancy •Fluid Motion • The continuity equation • Bernoulli’s effect •Demonstration, iClicker and example problems Reading: pages 243 to 255 in text book (Chapter 15) Definitions: Density Pressure, ρ , is defined as force per unit area: Mass M ρ = = [Units – kg.m-3] Volume V Definition of mass – 1 kg is the mass of 1 liter (10-3 m3) of pure water. Therefore, density of water given by: Mass 1 kg 3 −3 ρH O = = 3 3 = 10 kg ⋅m 2 Volume 10− m Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Atmospheric pressure (1 atm.) is equal to 101325 N.m-2. 1 pound per square inch (1 psi) is equal to: 1 psi = 6944 Pa = 0.068 atm 1atm = 14.7 psi Definitions: Pressure (p ) Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A Pressure in Fluids Pressure, " p, is defined as force per unit area: # Force F p = = [Units – N.m-2, or Pascal (Pa)] " A8" rea A + $ In the presence of gravity, pressure in a static+ 8" fluid increases with depth. " – This allows an upward pressure force " to balance the downward gravitational force. + " $ – This condition is hydrostatic equilibrium. – Incompressible fluids like liquids have constant density; for them, pressure as a function of depth h is p p gh = 0+ρ p0 = pressure at surface " + Pressure in Fluids Pressure, p, is defined as force per unit area: Force F p = = [Units – N.m-2, or Pascal (Pa)] Area A In the presence of gravity, pressure in a static fluid increases with depth.