3 Stress and the Balance Principles
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Multivector Differentiation and Linear Algebra 0.5Cm 17Th Santaló
Multivector differentiation and Linear Algebra 17th Santalo´ Summer School 2016, Santander Joan Lasenby Signal Processing Group, Engineering Department, Cambridge, UK and Trinity College Cambridge [email protected], www-sigproc.eng.cam.ac.uk/ s jl 23 August 2016 1 / 78 Examples of differentiation wrt multivectors. Linear Algebra: matrices and tensors as linear functions mapping between elements of the algebra. Functional Differentiation: very briefly... Summary Overview The Multivector Derivative. 2 / 78 Linear Algebra: matrices and tensors as linear functions mapping between elements of the algebra. Functional Differentiation: very briefly... Summary Overview The Multivector Derivative. Examples of differentiation wrt multivectors. 3 / 78 Functional Differentiation: very briefly... Summary Overview The Multivector Derivative. Examples of differentiation wrt multivectors. Linear Algebra: matrices and tensors as linear functions mapping between elements of the algebra. 4 / 78 Summary Overview The Multivector Derivative. Examples of differentiation wrt multivectors. Linear Algebra: matrices and tensors as linear functions mapping between elements of the algebra. Functional Differentiation: very briefly... 5 / 78 Overview The Multivector Derivative. Examples of differentiation wrt multivectors. Linear Algebra: matrices and tensors as linear functions mapping between elements of the algebra. Functional Differentiation: very briefly... Summary 6 / 78 We now want to generalise this idea to enable us to find the derivative of F(X), in the A ‘direction’ – where X is a general mixed grade multivector (so F(X) is a general multivector valued function of X). Let us use ∗ to denote taking the scalar part, ie P ∗ Q ≡ hPQi. Then, provided A has same grades as X, it makes sense to define: F(X + tA) − F(X) A ∗ ¶XF(X) = lim t!0 t The Multivector Derivative Recall our definition of the directional derivative in the a direction F(x + ea) − F(x) a·r F(x) = lim e!0 e 7 / 78 Let us use ∗ to denote taking the scalar part, ie P ∗ Q ≡ hPQi. -

Appendix A: Matrices and Tensors
Appendix A: Matrices and Tensors A.1 Introduction and Rationale The purpose of this appendix is to present the notation and most of the mathematical techniques that will be used in the body of the text. The audience is assumed to have been through several years of college level mathematics that included the differential and integral calculus, differential equations, functions of several variables, partial derivatives, and an introduction to linear algebra. Matrices are reviewed briefly and determinants, vectors, and tensors of order two are described. The application of this linear algebra to material that appears in undergraduate engineering courses on mechanics is illustrated by discussions of concepts like the area and mass moments of inertia, Mohr’s circles and the vector cross and triple scalar products. The solutions to ordinary differential equations are reviewed in the last two sections. The notation, as far as possible, will be a matrix notation that is easily entered into existing symbolic computational programs like Maple, Mathematica, Matlab, and Mathcad etc. The desire to represent the components of three-dimensional fourth order tensors that appear in anisotropic elasticity as the components of six-dimensional second order tensors and thus represent these components in matrices of tensor components in six dimensions leads to the nontraditional part of this appendix. This is also one of the nontraditional aspects in the text of the book, but a minor one. This is described in Sect. A.11, along with the rationale for this approach. A.2 Definition of Square, Column, and Row Matrices An r by c matrix M is a rectangular array of numbers consisting of r rows and c columns, S.C. -
Modeling Conservation of Mass
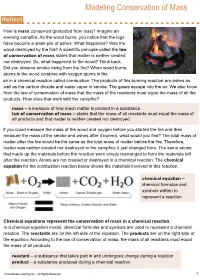
Modeling Conservation of Mass How is mass conserved (protected from loss)? Imagine an evening campfire. As the wood burns, you notice that the logs have become a small pile of ashes. What happened? Was the wood destroyed by the fire? A scientific principle called the law of conservation of mass states that matter is neither created nor destroyed. So, what happened to the wood? Think back. Did you observe smoke rising from the fire? When wood burns, atoms in the wood combine with oxygen atoms in the air in a chemical reaction called combustion. The products of this burning reaction are ashes as well as the carbon dioxide and water vapor in smoke. The gases escape into the air. We also know from the law of conservation of mass that the mass of the reactants must equal the mass of all the products. How does that work with the campfire? mass – a measure of how much matter is present in a substance law of conservation of mass – states that the mass of all reactants must equal the mass of all products and that matter is neither created nor destroyed If you could measure the mass of the wood and oxygen before you started the fire and then measure the mass of the smoke and ashes after it burned, what would you find? The total mass of matter after the fire would be the same as the total mass of matter before the fire. Therefore, matter was neither created nor destroyed in the campfire; it just changed form. The same atoms that made up the materials before the reaction were simply rearranged to form the materials left after the reaction. -

Law of Conversation of Energy
Law of Conservation of Mass: "In any kind of physical or chemical process, mass is neither created nor destroyed - the mass before the process equals the mass after the process." - the total mass of the system does not change, the total mass of the products of a chemical reaction is always the same as the total mass of the original materials. "Physics for scientists and engineers," 4th edition, Vol.1, Raymond A. Serway, Saunders College Publishing, 1996. Ex. 1) When wood burns, mass seems to disappear because some of the products of reaction are gases; if the mass of the original wood is added to the mass of the oxygen that combined with it and if the mass of the resulting ash is added to the mass o the gaseous products, the two sums will turn out exactly equal. 2) Iron increases in weight on rusting because it combines with gases from the air, and the increase in weight is exactly equal to the weight of gas consumed. Out of thousands of reactions that have been tested with accurate chemical balances, no deviation from the law has ever been found. Law of Conversation of Energy: The total energy of a closed system is constant. Matter is neither created nor destroyed – total mass of reactants equals total mass of products You can calculate the change of temp by simply understanding that energy and the mass is conserved - it means that we added the two heat quantities together we can calculate the change of temperature by using the law or measure change of temp and show the conservation of energy E1 + E2 = E3 -> E(universe) = E(System) + E(Surroundings) M1 + M2 = M3 Is T1 + T2 = unknown (No, no law of conservation of temperature, so we have to use the concept of conservation of energy) Total amount of thermal energy in beaker of water in absolute terms as opposed to differential terms (reference point is 0 degrees Kelvin) Knowns: M1, M2, T1, T2 (Kelvin) When add the two together, want to know what T3 and M3 are going to be. -

Chapter 5 Constitutive Modelling
Chapter 5 Constitutive Modelling 5.1 Introduction Lecture 14 Thus far we have established four conservation (or balance) equations, an entropy inequality and a number of kinematic relationships. The overall set of governing equations are collected in Table 5.1. The Eulerian form has a one more independent equation because the density must be determined, 1 whereas in the Lagrangian form it is directly related to the prescribed initial densityρ 0. Physical Law Eulerian FormN Lagrangian Formn DR ∂r Kinematics: Dt =V , 3, ∂t =v, 3; Dρ ∇ · Mass: Dt +ρ R V=0, 1,ρ 0 =ρJ, 0; DV ∇ · ∂v ∇ · Linear momentum:ρ Dt = R T+ρF , 3,ρ 0 ∂t = r p+ρ 0f, 3; Angular momentum:T=T T , 3,s=s T , 3; DΦ ∂φ Energy:ρ =T:D+ρB ∇ ·Q, 1,ρ =s: e˙+ρ b ∇ r ·q, 1; Dt − R 0 ∂t 0 − Dη ∂η0 Entropy inequality:ρ ∇ ·(Q/Θ)+ρB/Θ, 0,ρ ∇r (q/θ)+ρ b/θ, 0. Dt ≥ − R 0 ∂t ≥ − 0 Independent Equations: 11 10 Table 5.1: The governing equations for continuum mechanics in Eulerian and Lagrangian form. N is the number of independent equations in Eulerian form andn is the number of independent equations in Lagrangian form. Examining the equations reveals that they involve more unknown variables than equations, listed in Table 5.2. Once again the fact that the density in the Lagrangian formulation is prescribed means that there is one fewer unknown compared to the Eulerian formulation. Thus, in either formulation and additional eleven equations are required to close the system. -

Correct Expression of Material Derivative and Application to the Navier-Stokes Equation —– the Solution Existence Condition of Navier-Stokes Equation
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 15 June 2020 doi:10.20944/preprints202003.0030.v4 Correct Expression of Material Derivative and Application to the Navier-Stokes Equation |{ The solution existence condition of Navier-Stokes equation Bo-Hua Sun1 1 School of Civil Engineering & Institute of Mechanics and Technology Xi'an University of Architecture and Technology, Xi'an 710055, China http://imt.xauat.edu.cn email: [email protected] (Dated: June 15, 2020) The material derivative is important in continuum physics. This paper shows that the expression d @ dt = @t + (v · r), used in most literature and textbooks, is incorrect. This article presents correct d(:) @ expression of the material derivative, namely dt = @t (:) + v · [r(:)]. As an application, the form- solution of the Navier-Stokes equation is proposed. The form-solution reveals that the solution existence condition of the Navier-Stokes equation is that "The Navier-Stokes equation has a solution if and only if the determinant of flow velocity gradient is not zero, namely det(rv) 6= 0." Keywords: material derivative, velocity gradient, tensor calculus, tensor determinant, Navier-Stokes equa- tions, solution existence condition In continuum physics, there are two ways of describ- derivative as in Ref. 1. Therefore, to revive the great ing continuous media or flows, the Lagrangian descrip- influence of Landau in physics and fluid mechanics, we at- tion and the Eulerian description. In the Eulerian de- tempt to address this issue in this dedicated paper, where scription, the material derivative with respect to time we revisit the material derivative to show why the oper- d @ dv @v must be defined. -

Foundations of Continuum Mechanics
Foundations of Continuum Mechanics • Concerned with material bodies (solids and fluids) which can change shape when loaded, and view is taken that bodies are continuous bodies. • Commonly known that matter is made up of discrete particles, and only known continuum is empty space. • Experience has shown that descriptions based on continuum modeling is useful, provided only that variation of field quantities on the scale of deformation mechanism is small in some sense. Goal of continuum mechanics is to solve BVP. The main steps are 1. Mathematical preliminaries (Tensor theory) 2. Kinematics 3. Balance laws and field equations 4. Constitutive laws (models) Mathematical structure adopted to ensure that results are coordinate invariant and observer invariant and are consistent with material symmetries. Vector and Tensor Theory Most tensors of interest in continuum mechanics are one of the following type: 1. Symmetric – have 3 real eigenvalues and orthogonal eigenvectors (eg. Stress) 2. Skew-Symmetric – is like a vector, has an associated axial vector (eg. Spin) 3. Orthogonal – describes a transformation of basis (eg. Rotation matrix) → 3 3 3 u = ∑uiei = uiei T = ∑∑Tijei ⊗ e j = Tijei ⊗ e j i=1 ~ ij==1 1 When the basis ei is changed, the components of tensors and vectors transform in a specific way. Certain quantities remain invariant – eg. trace, determinant. Gradient of an nth order tensor is a tensor of order n+1 and divergence of an nth order tensor is a tensor of order n-1. ∂ui ∂ui ∂Tij ∇ ⋅u = ∇ ⊗ u = ei ⊗ e j ∇ ⋅ T = e j ∂xi ∂x j ∂xi Integral (divergence) Theorems: T ∫∫RR∇ ⋅u dv = ∂ u⋅n da ∫∫RR∇ ⊗ u dv = ∂ u ⊗ n da ∫∫RR∇ ⋅ T dv = ∂ T n da Kinematics The tensor that plays the most important role in kinematics is the Deformation Gradient x(X) = X + u(X) F = ∇X ⊗ x(X) = I + ∇X ⊗ u(X) F can be used to determine 1. -

A Some Basic Rules of Tensor Calculus
A Some Basic Rules of Tensor Calculus The tensor calculus is a powerful tool for the description of the fundamentals in con- tinuum mechanics and the derivation of the governing equations for applied prob- lems. In general, there are two possibilities for the representation of the tensors and the tensorial equations: – the direct (symbolic) notation and – the index (component) notation The direct notation operates with scalars, vectors and tensors as physical objects defined in the three dimensional space. A vector (first rank tensor) a is considered as a directed line segment rather than a triple of numbers (coordinates). A second rank tensor A is any finite sum of ordered vector pairs A = a b + ... +c d. The scalars, vectors and tensors are handled as invariant (independent⊗ from the choice⊗ of the coordinate system) objects. This is the reason for the use of the direct notation in the modern literature of mechanics and rheology, e.g. [29, 32, 49, 123, 131, 199, 246, 313, 334] among others. The index notation deals with components or coordinates of vectors and tensors. For a selected basis, e.g. gi, i = 1, 2, 3 one can write a = aig , A = aibj + ... + cidj g g i i ⊗ j Here the Einstein’s summation convention is used: in one expression the twice re- peated indices are summed up from 1 to 3, e.g. 3 3 k k ik ik a gk ∑ a gk, A bk ∑ A bk ≡ k=1 ≡ k=1 In the above examples k is a so-called dummy index. Within the index notation the basic operations with tensors are defined with respect to their coordinates, e. -

Cauchy Tetrahedron Argument and the Proofs of the Existence of Stress Tensor, a Comprehensive Review, Challenges, and Improvements
CAUCHY TETRAHEDRON ARGUMENT AND THE PROOFS OF THE EXISTENCE OF STRESS TENSOR, A COMPREHENSIVE REVIEW, CHALLENGES, AND IMPROVEMENTS EHSAN AZADI1 Abstract. In 1822, Cauchy presented the idea of traction vector that contains both the normal and tangential components of the internal surface forces per unit area and gave the tetrahedron argument to prove the existence of stress tensor. These great achievements form the main part of the foundation of continuum mechanics. For about two centuries, some versions of tetrahedron argument and a few other proofs of the existence of stress tensor are presented in every text on continuum mechanics, fluid mechanics, and the relevant subjects. In this article, we show the birth, importance, and location of these Cauchy's achievements, then by presenting the formal tetrahedron argument in detail, for the first time, we extract some fundamental challenges. These conceptual challenges are related to the result of applying the conservation of linear momentum to any mass element, the order of magnitude of the surface and volume terms, the definition of traction vectors on the surfaces that pass through the same point, the approximate processes in the derivation of stress tensor, and some others. In a comprehensive review, we present the different tetrahedron arguments and the proofs of the existence of stress tensor, discuss the challenges in each one, and classify them in two general approaches. In the first approach that is followed in most texts, the traction vectors do not exactly define on the surfaces that pass through the same point, so most of the challenges hold. But in the second approach, the traction vectors are defined on the surfaces that pass exactly through the same point, therefore some of the relevant challenges are removed. -

Lecture 1: Introduction
Lecture 1: Introduction E. J. Hinch Non-Newtonian fluids occur commonly in our world. These fluids, such as toothpaste, saliva, oils, mud and lava, exhibit a number of behaviors that are different from Newtonian fluids and have a number of additional material properties. In general, these differences arise because the fluid has a microstructure that influences the flow. In section 2, we will present a collection of some of the interesting phenomena arising from flow nonlinearities, the inhibition of stretching, elastic effects and normal stresses. In section 3 we will discuss a variety of devices for measuring material properties, a process known as rheometry. 1 Fluid Mechanical Preliminaries The equations of motion for an incompressible fluid of unit density are (for details and derivation see any text on fluid mechanics, e.g. [1]) @u + (u · r) u = r · S + F (1) @t r · u = 0 (2) where u is the velocity, S is the total stress tensor and F are the body forces. It is customary to divide the total stress into an isotropic part and a deviatoric part as in S = −pI + σ (3) where tr σ = 0. These equations are closed only if we can relate the deviatoric stress to the velocity field (the pressure field satisfies the incompressibility condition). It is common to look for local models where the stress depends only on the local gradients of the flow: σ = σ (E) where E is the rate of strain tensor 1 E = ru + ruT ; (4) 2 the symmetric part of the the velocity gradient tensor. The trace-free requirement on σ and the physical requirement of symmetry σ = σT means that there are only 5 independent components of the deviatoric stress: 3 shear stresses (the off-diagonal elements) and 2 normal stress differences (the diagonal elements constrained to sum to 0). -

Pacific Northwest National Laboratory Operated by Battelie for the U.S
PNNL-11668 UC-2030 Pacific Northwest National Laboratory Operated by Battelie for the U.S. Department of Energy Seismic Event-Induced Waste Response and Gas Mobilization Predictions for Typical Hanf ord Waste Tank Configurations H. C. Reid J. E. Deibler 0C1 1 0 W97 OSTI September 1997 •-a Prepared for the US. Department of Energy under Contract DE-AC06-76RLO1830 1» DISCLAIMER This report was prepared as an account of work sponsored by an agency of the United States Government, Neither the United States Government nor any agency thereof, nor Battelle Memorial Institute, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof, or Battelle Memorial Institute. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. PACIFIC NORTHWEST NATIONAL LABORATORY operated by BATTELLE for the UNITED STATES DEPARTMENT OF ENERGY under Contract DE-AC06-76RLO 1830 Printed in the United States of America Available to DOE and DOE contractors from the Office of Scientific and Technical Information, P.O. Box 62, Oak Ridge, TN 37831; prices available from (615) 576-8401, Available to the public from the National Technical Information Service, U.S. -
Hydrostatic Forces on Surface
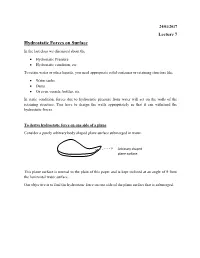
24/01/2017 Lecture 7 Hydrostatic Forces on Surface In the last class we discussed about the Hydrostatic Pressure Hydrostatic condition, etc. To retain water or other liquids, you need appropriate solid container or retaining structure like Water tanks Dams Or even vessels, bottles, etc. In static condition, forces due to hydrostatic pressure from water will act on the walls of the retaining structure. You have to design the walls appropriately so that it can withstand the hydrostatic forces. To derive hydrostatic force on one side of a plane Consider a purely arbitrary body shaped plane surface submerged in water. Arbitrary shaped plane surface This plane surface is normal to the plain of this paper and is kept inclined at an angle of θ from the horizontal water surface. Our objective is to find the hydrostatic force on one side of the plane surface that is submerged. (Source: Fluid Mechanics by F.M. White) Let ‘h’ be the depth from the free surface to any arbitrary element area ‘dA’ on the plane. Pressure at h(x,y) will be p = pa + ρgh where, pa = atmospheric pressure. For our convenience to make various points on the plane, we have taken the x-y coordinates accordingly. We also introduce a dummy variable ξ that show the inclined distance of the arbitrary element area dA from the free surface. The total hydrostatic force on one side of the plane is F pdA where, ‘A’ is the total area of the plane surface. A This hydrostatic force is similar to application of continuously varying load on the plane surface (recall solid mechanics).