Print 15Chap10.Tif
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Winning the Salvo Competition Rebalancing America’S Air and Missile Defenses
WINNING THE SALVO COMPETITION REBALANCING AMERICA’S AIR AND MISSILE DEFENSES MARK GUNZINGER BRYAN CLARK WINNING THE SALVO COMPETITION REBALANCING AMERICA’S AIR AND MISSILE DEFENSES MARK GUNZINGER BRYAN CLARK 2016 ABOUT THE CENTER FOR STRATEGIC AND BUDGETARY ASSESSMENTS (CSBA) The Center for Strategic and Budgetary Assessments is an independent, nonpartisan policy research institute established to promote innovative thinking and debate about national security strategy and investment options. CSBA’s analysis focuses on key questions related to existing and emerging threats to U.S. national security, and its goal is to enable policymakers to make informed decisions on matters of strategy, security policy, and resource allocation. ©2016 Center for Strategic and Budgetary Assessments. All rights reserved. ABOUT THE AUTHORS Mark Gunzinger is a Senior Fellow at the Center for Strategic and Budgetary Assessments. Mr. Gunzinger has served as the Deputy Assistant Secretary of Defense for Forces Transformation and Resources. A retired Air Force Colonel and Command Pilot, he joined the Office of the Secretary of Defense in 2004. Mark was appointed to the Senior Executive Service and served as Principal Director of the Department’s central staff for the 2005–2006 Quadrennial Defense Review. Following the QDR, he served as Director for Defense Transformation, Force Planning and Resources on the National Security Council staff. Mr. Gunzinger holds an M.S. in National Security Strategy from the National War College, a Master of Airpower Art and Science degree from the School of Advanced Air and Space Studies, a Master of Public Administration from Central Michigan University, and a B.S. in chemistry from the United States Air Force Academy. -

World War II at Sea This Page Intentionally Left Blank World War II at Sea
World War II at Sea This page intentionally left blank World War II at Sea AN ENCYCLOPEDIA Volume I: A–K Dr. Spencer C. Tucker Editor Dr. Paul G. Pierpaoli Jr. Associate Editor Dr. Eric W. Osborne Assistant Editor Vincent P. O’Hara Assistant Editor Copyright 2012 by ABC-CLIO, LLC All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording, or otherwise, except for the inclusion of brief quotations in a review, without prior permission in writing from the publisher. Library of Congress Cataloging-in-Publication Data World War II at sea : an encyclopedia / Spencer C. Tucker. p. cm. Includes bibliographical references and index. ISBN 978-1-59884-457-3 (hardcopy : alk. paper) — ISBN 978-1-59884-458-0 (ebook) 1. World War, 1939–1945—Naval operations— Encyclopedias. I. Tucker, Spencer, 1937– II. Title: World War Two at sea. D770.W66 2011 940.54'503—dc23 2011042142 ISBN: 978-1-59884-457-3 EISBN: 978-1-59884-458-0 15 14 13 12 11 1 2 3 4 5 This book is also available on the World Wide Web as an eBook. Visit www.abc-clio.com for details. ABC-CLIO, LLC 130 Cremona Drive, P.O. Box 1911 Santa Barbara, California 93116-1911 This book is printed on acid-free paper Manufactured in the United States of America To Malcolm “Kip” Muir Jr., scholar, gifted teacher, and friend. This page intentionally left blank Contents About the Editor ix Editorial Advisory Board xi List of Entries xiii Preface xxiii Overview xxv Entries A–Z 1 Chronology of Principal Events of World War II at Sea 823 Glossary of World War II Naval Terms 831 Bibliography 839 List of Editors and Contributors 865 Categorical Index 877 Index 889 vii This page intentionally left blank About the Editor Spencer C. -

Precision Munitions and the Systems in Which They Are Embedded—GPS, Mapping, High-Resolution Radar, and Non-Lethal Weapons by Richard L
Precision Munitions and the Systems in Which They Are Embedded—GPS, Mapping, High-Resolution Radar, and Non-Lethal Weapons by Richard L. Garwin Council on Foreign Relations [email protected] www.fas.org/rlg and www.cfr.org Presented at the XV Amaldi Conference Helsinki, September 25-27, 2003 I am glad to be here to tell you about this vast field of precision munitions and how they are used. A precision munition is of no use at all unless you have directed and delivered it; important tools for this are the Global Positioning System, mapping to find out where the potential targets are, and high resolution radar, for its contribution to mapping and to observation of the targets. A nation may sometimes resort to combat to achieve its goals, so the planning and conduct of war are important and typically costly national activities. Warfare may have the purpose of repelling enemy forces or allowing the advance of one’s own forces into occupied territory. It may also have the quite different purpose of deterrence or compellence—to operate on the judgment and will of the national authorities to order cessation of hostilities, compliance with the requests of the opponent, or surrender of authority and of the state. History is replete with examples of precision munitions: expert archers, sharpshooters with rifles, and even poison administered to a commander or head of state. In contrast to these are weapons of wide effect: the intentional spread of disease, fire bombing, mass bombing with explosives or even nuclear weapons, and the exploitation of societal vulnerabilities in the form of dams, food supply, and the like. -
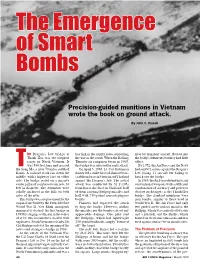
The Emergence of Smart Bombs T
The Emergence of Smart Bombs Precision-guided munitions in Vietnam wrote the book on ground attack. By John T. Correll he Dragon’s Jaw bridge at key link in the supply route supporting river by transport aircraft, floated into Thanh Hoa was the toughest the war in the south. When the Rolling the bridge abutments but they had little target in North Vietnam. It Thunder air campaign began in 1965, effect. was 540 feet long and crossed the bridge was selected for early attack. By 1972, the Air Force and the Navy Tthe Song Ma, a river 70 miles south of On April 3, 1965, Lt. Col. Robinson had sent 871 sorties against the Dragon’s Hanoi. A railroad track ran down the Risner led a strike force of almost 80 air- Jaw, losing 11 aircraft but failing to middle, with a highway lane on either craft from bases in Vietnam and Thailand knock out the bridge. side. The bridge rested on a massive against the Dragon’s Jaw. The actual In 1965, the Air Force did not have any center pillar of reinforced concrete, 16 attack was conducted by 31 F-105s conventional weapons with a sufficient feet in diameter. The abutments were from Korat Air Base in Thailand, half combination of accuracy and power to solidly anchored in the hills on both of them carrying Bullpup missiles and destroy such targets as the Thanh Hoa sides of the river. half with 750-pound general-purpose bridge. The standard munitions were This bridge was a replacement for the bombs. -
Vol 02 Issue 2
Secretary of the Air Force Edward C. Aldridge, Jr. Air Force Chief of Staff Gen Larry D. Welch Commander, Air University Lt Gen Ralph E. Havens Commander, Center for Aerospace Doctrine, Research, and Education Col Sidney J, Wise Editor Col Keith W. Geiger Associate Editor Maj Michael A. Kirlland Professional Staff Hugh Rii hardson. Contributing Editor Marvin W. Bassett. Contributing Editor John A. Westcott, Art Director and Production Manager Steven C. Garst, Art Editor and The Airpower Journal, published quarterly, is the professional journal of the United States Air Force. It is designed to serve as an open forum for presenting and stimulating innovative thinking on m ilitary doctrine, strategy, tactics, force struc- ture, readiness, and other national defense mat- ters. The views and opinions expressed or implied in the Journal are those of the authors and should not be construed as carrying the official sanction of the Department of Defense, the Air Force, Air University, or other agencies or departments of the US government. Articles in this edition may be reproduced in whole or in part without permis- sion. If reproduced, the Airpower Journal re- quests a courtesy line. JOURNAL SUMMER 1988, Vol. II, No. 2 AFRP 50-2 Editorial— My Friend Mich and the Dual-Track System 2 The SIOP: What Kind of War Plan? Dr Stephen J. Cimbala 4 The Strategic Defense Initiative in the Military Context Lt Col G. E. Myers, USAF 12 World War I from the Viewpoint of American Airmen ClC W. Kevin Durden, USAFA 28 Technology, Air Power, and the Modern Theater Battlefield Maj Robert M. -

NTIS Database Search Guide the NTIS Database Search Guide Author fi Eld Are Shown
® DATABASE GUIDE National Technical Information Service U.S. Department of Commerce 5301 Shawnee Road Alexandria, VA 22312 Search Guide for the NTIS Database 1 Introduction Organization of the Search Guide Purpose of the Search Guide Section I - Introduction: Provides a basic introduction to This guide provides the information necessary for productive, the features of the NTIS Database, how it differs from other effi cient and cost-effective search and retrieval. government and/or scientifi c and technical databases and how it Use this manual to: supplements other government databases. • Minimize “false hits,” which are common to such Section II - NTIS Database Elements: Each component fi eld of large and varied databases; the bibliographic record is defi ned with examples. Presents the record structure and composition of the NTIS Database. Changes • Clarify the NTIS Database information derived in the use of a fi eld are discussed. NTIS’ names and labels for the from multiple government sources; fi elds in the bibliographic citation are identifi ed. • Gain an in-depth understanding of the database Section III – Online Searching Hints: Includes online structure; searching hints arranged alphabetically by topic and fi eld. • Provide background references and historical Points covered are: searching accession numbers and specially perspective; and assigned information product type numbers; abbreviations, acronyms; biological species; chemical studies; and verbalization • Serve as a reference manual for users, or a of scientifi c and mathematical symbols. Distinctions between teaching tool at training seminars. sponsoring agencies and performing agencies in the corporate The NTIS Database Search Guide The NTIS Database Search Guide author fi eld are shown. -

Tactical References for Falcon 4.0
Tactical Reference for Falcon 4.0 1 Tactical References for Falcon 4.0 Tactical Reference Munitions Handbook 2 Tactical Reference for Falcon 4.0 Rev. 0.0421 3 Tactical References for Falcon 4.0 TABEL OF CONTENTS INTRODUCTION...........................................................................................................................................9 SOURCES AND RESOURCES .......................................................................................................................10 US/ALLIED MUNITIONS CHAPTER ..............................................................................................................11 FREE FALL BOMBS ....................................................................................................................................11 B-53 ............................................................................................................................................................. 11 B-61 ............................................................................................................................................................. 12 B-83 ............................................................................................................................................................. 13 BLU-1/B....................................................................................................................................................... 14 BLU-10/A.................................................................................................................................................... -

A Study of the World's Naval Surface-To-Air Missile Defense Systems
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection 1984 A study of the world's naval surface-to-air missile defense systems. Saraparung, Sukij http://hdl.handle.net/10945/19583 DUDLEY KNOX LIBRARY NAVAL POSTGRADUATE £ Z MONTEREY, CALIFORIJI ' 3 NAVAL POSTGRADUATE SCHOOL Monterey, California THESIS A STUDY OF THE WORLD'S NAVAL SURFACE--TO -AIR MISSILE DEFENSE SYSTEMS by Sukij Saraparung December 198 4 Thesis Ad visor: Robert E. Ball Approved for public release; distribution unlimited T223025 Unclassified SECURITY CLASSIFICATION OF THIS PAGE (Whan Data Ents READ INSTRUCTIONS REPORT DOCUMENTATION PAGE BEFORE COMPLETING FORM I. REPORT NUMBEI 2. GOVT ACCESSION NO 3. RECIPIENT'S CATALOG NUMBER 4. TITLE (and Subtitle) 5. TYPE OF REPORT 4 PERIOD COVEREO A Study of the World's Naval Master's Thesis; December 1984 Sur face-to-Air Missile Defense Systems 6. PERFORMING ORG. REPORT NUMBER 7. AUTHORCs; 8. CONTRACT OR GRANT NUMBERS Saraparung, Sukij 9. PERFORMING ORGANIZATION NAME AND ADDRESS Naval Postgraduate School Monterev, CA 9 394 3 II. CONTROLLING OFFICE NAME AND AODRESS 12. REPORT DATE Naval Postgraduate School December 19 8 4 13. NUMBER OF PAGES 9 3943 Monterey, CA 236 14. MONITORING AGENCY NAME 4 AOOHESS(lt different from Controlling Office) 15. SECURITY CLASS, (ot this report) Unclassified 16. DISTRIBUTION STATEMENT (ol this Report) Approved for public release; distribution unlimited 17. DISTRIBUTION STATEMENT (ol the abstract entered In Block 20, It different from Report) 18. SUPPLEMENTARY NOTES 19. KEY WORDS fConlinue on reverse aide II necessary and Identity by block number) Shipborne Sur face-to-Air Missile (SAM) 20. -

Missile by Television What Price Plutonium ?
NATURE. VOL. 220. DECEMBER 14. 1968 1061 distribution and angle of arrival of solar wind protons. and Engins Matra in France. Two versions of the The Centre d'Etudes Nucleaires de Saclay is to measure weapon have been produced. The television version electrons, protons and alpha particles of solar and for which Britain has the prime responsibility- is galactic origin; and together with the University of controlled from the launcher aircraft by a weapons Milan will look at the spectrum of cosmic ray electrons controller who receives live transmission from the in the range 50-600 MeV. missile's camera. He is then in a position to steer the HEOS-A also contains an experiment devised by the missile visually on to its target. The job is apparently Max Planck Institute for Extraterrestrial Physics. sufficiently full-time as to eliminate using the pilot as This consists of a 2·5 kg capsule of barium to be ejected the weapons operator. The picture below shows the when the satellite is some 20,000 km from the Earth, view of a target as seen on the operator's television crossing the boundary of the magnetosphere. The monitor, this particular target being moored at sea. plan is to release the capsule at some suitable time, The television guidance system has been developed by when the resulting cloud of barium ions can be photo the Marconi Company, which claims that the technologi graphed from Kitt Peak, Arizona, and from the site cal barriers overcome in producing the compact elec of the proposed European southern hemisphere observa tronics necessary to make the ·weapon operational have tory in Chile. -

AGM-65E Maverick Missile Is an Air-To- Version Was Delivered to the Air Ground Weapon That Can Meet the Service's Needs Force in 1972
AMMO Chiefs Association (ACA) “Shell and Flame” Issue Number: XV December 2007 Board of Directors We are the Ammo Chiefs Association, a not-for-profit; fraternal Association dedicated to the promotion of camaraderie among active duty and retired USAF President AMMO Chiefs. Our members work throughout the year to raise funds for Richard McVey worthwhile charitable causes such as the Richard Gauvin Memorial Fund, the Vice-President Enlisted Widows Foundation, and a Sunshine Committee to respond to members‟ Rich Pennington time of distress. The ACA contributes to the morale of active duty AMMO troops at the Chapter level through recognition and sports programs. The ACA sponsors Secretary awards programs for the AMMO School House Outstanding Performer, and the Fred O‟Hern AFCOMAC Outstanding Performer. ACA has contributed to cultural enterprises Treasurer such as the RAF Welford AMMO Museum. We are AMMO, and proud of it! Joe Dominguez Please visit the AMMO Chiefs web page for more information at http://ammochiefs.com. Chief-at-Arms Mike Curran Association News From your President: Director-at-Large ACA Members. One Director-at- Large Two It has been another good year for the AMMO Chiefs Association. We've finished a re- Director-at- Large write of our Constitution; we've incorporated in the state of Florida, selected the ACA Three Emerald Coast Chapter to hold our reunion in 2008, held ACA officer elections, and managed to conduct the vast majority of our business through virtual meetings and by Director-at-Large Four email. Still in the works are efforts to gain tax exempt status for the ACA being worked by Fred O'Hern and Joe Dominguez. -

Appendix I Weapon Systems
Appendix I Weapon Systems In this appendix, compiled by John Grin, a brief description of weapon systems, mentioned in this book, is given. Part A of the appendix deals with missiles; in Part B information on other systems is given. A MISSILES The following table is largely based on Doug Richardson, 'World Missile Directory', FLIGHT International, 2 February 1985. When other sources have been used, this is indicated by superscript numbers, referring to the notes at the end of the table. 278 Missile Type Dimensions Range Warhead(s) Additional remarks Producing! length x diameter (km) developing (m x m) country AIM-7M Sparrow Air-to-air missile 3.70 X 0.20 max. 40 kg USA 50-100 continuous rod, proximity + impact fuses AIM-9 Air-to-air missile = 3 X 0.13 10-18 Fragmentation Infra-red seeker USA Sidewinder or blast- fragmentation ALARM (Air Air-to-surface missile 4.24 X 0.22 70-8011 Blast- Homes in on enemy radar Launched Anti- for the suppression of fragmentation II Three modes of operations: Radiation enemy air defence direct attack, indirect attack Missile) and dual model! ALCM (Air Cruise missile, nuclear 6.32 X 0.61 2500 1 x 200 kton CEP: 30 m; the ALCM will USA Launched Cruise air-to-surface be carried by B52 and B-IB Missile) bombers1 Inertial guidance + terrain contour matching AMRAAM Air-to-air missile 3.65 X 0.18 55-75 20 kg (?) Inertial guidance + active USA (Advanced radar terminal homing. Medium Range Intended to replace AIM-7. Air-to-Air Will be produced in US with Missile) licence production in Europe. -
Tactical References for Falcon 4.0
Tactical Reference for Falcon 4.0 1 Tactical References for Falcon 4.0 Tactical Reference Munitions Handbook 2 Tactical Reference for Falcon 4.0 Rev. 0.0421 3 Tactical References for Falcon 4.0 TABEL OF CONTENTS INTRODUCTION...........................................................................................................................................9 SOURCES AND RESOURCES .......................................................................................................................10 US/ALLIED MUNITIONS CHAPTER ..............................................................................................................11 FREE FALL BOMBS ....................................................................................................................................11 B-53 ............................................................................................................................................................. 11 B-61 ............................................................................................................................................................. 12 B-83 ............................................................................................................................................................. 13 BLU-1/B....................................................................................................................................................... 14 BLU-10/A....................................................................................................................................................