Proximity Fuzes Theory and Techniques Proximity Fuzes Theory and Techniques
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Cluster Weapons – Military Utility and Alternatives
FFI-rapport/2007/02345 Cluster weapons – military utility and alternatives Ove Dullum Forsvarets forskningsinstitutt/Norwegian Defence Research Establishment (FFI) 1 February 2008 FFI-rapport 2007/02345 Oppdrag 351301 ISBN 978-82-464-1318-1 Keywords Militære operasjoner / Military operations Artilleri / Artillery Flybomber / Aircraft bombs Klasevåpen / Cluster weapons Ammunisjon / Ammunition Approved by Ove Dullum Project manager Jan Ivar Botnan Director of Research Jan Ivar Botnan Director 2 FFI-rapport/2007/02345 English summary This report is made through the sponsorship of the Royal Norwegian Ministry of Foreign Affairs. Its purpose is to get an overview of the military utility of cluster munitions, and to find to which degree their capacity can be substituted by current conventional weapons or weapons that are on the verge of becoming available. Cluster munition roughly serve three purposes; firstly to defeat soft targets, i e personnel; secondly to defeat armoured of light armoured vehicles; and thirdly to contribute to the suppressive effect, i e to avoid enemy forces to use their weapons without inflicting too much damage upon them. The report seeks to quantify the effect of such munitions and to compare this effect with that of conventional weapons and more modern weapons. The report discusses in some detail how such weapons work and which effect they have against different targets. The fragment effect is the most important one. Other effects are the armour piercing effect, the blast effect, and the incendiary effect. Quantitative descriptions of such effects are usually only found in classified literature. However, this report is exclusively based on unclassified sources. The availability of such sources has been sufficient to get an adequate picture of the effect of such weapons. -

Development of 155Mm M795 IM Precision Guidance Kit (PGK) Compatible Projectile
Development of 155mm M795 IM Precision Guidance Kit (PGK) Compatible Projectile Briefed by: Philip Samuels October 7 - 10, 2013 973-724-4064 2013 NDIA IM/EM [email protected] San Diego, CA 1 Distribution Statement Statement A: A: Approved Approved for forpublic public release; release; distribution distribution is unlimited is unlimited Background • The Army Qualified IMX-101 as the main fill for the 155mm M795 Artillery Projectile in June 2010 • The Army is now moving towards guided fuzes, ie Precision Guidance Kit (PGK), which is a deep intrusion fuze. – Due to the supplementary charge being removed for PGK use, IMX-101 would not be compliant with this fuze 2 Distribution Statement A: Approved for public release; distribution is unlimited System Description Changes via Army ECP (a) Changes via Army ECP (b) TNT PBXN-9 PBXN-9 IMX-104 TNT IMX-101 IMX-101 Legacy D529 DA54 DA54 PGK Fuze Compatible Non-PGK Fuze Compatible • Army developed projectile • Replaces TNT with IMX-101 • Similar to DA54 non-PGK fuze • Contains 24lbs of HE • Consists PBXN-9 compatible, uses IMX-101 and • Consists TNT supplemental supplemental charge PBXN-9 as supplemental charge charge • Less sensitive than legacy • Contains IMX-104 transfer • Poor IM testing results D529 charge to accommodate PGK • Not compatible with PGK fuze compatibility fuze • Maintains same IM performance • Currently not in inventory as DA54 non-PGK fuze and no plans to field compatible projectile 3 Distribution Statement A: Approved for public release; distribution is unlimited -

Alternative Anti-Personnel Mines the Next Generations Landmine Action Consists of the Following Co-Operating Organisations
Alternative anti-personnel mines The next generations Landmine Action consists of the following co-operating organisations: ActionAid International Alert Refugee Council Action for Southern Africa Jaipur Limb Campaign Royal College of Paediatrics & Action on Disability and Development Jesuit Refugee Service Child Health Adopt-A-Minefield UK MEDACT Saferworld Afghanaid Medical & Scientific Aid for Vietnam Laos & Save the Children UK Amnesty International UK Cambodia Soroptimist International UK Programme Action Committee CAFOD Medical Educational Trust Tearfund Cambodia Trust Merlin United Nations Association Campaign Against Arms Trade Mines Advisory Group United Nations Children’s Fund (UNICEF) UK Child Advocacy International Motivation VERTIC Christian Aid Mozambique Angola Committee War Child Comic Relief Omega Foundation War on Want Concern Worldwide One World Action Welsh Centre for International Affairs Disability Awareness in Action Oxfam GB Women’s International League for Peace & Environmental Investigation Agency Pax Christi Freedom Global Witness Peace Pledge Union World Vision UK Handicap International (UK) People and Planet Hope for Children POWER Human Rights Watch Quaker Peace & Service The member organisations of the German Initiative to Ban Landmines are: Bread for the World Social Service Agency of the Evangelical Church Misereor Christoffel Mission for the Blind in Germany Oxfam Germany German Justitia et Pax Commission Eirene International Pax Christi German Committee for Freedom from Hunger Handicap International Germany -
Explosive Weapon Effectsweapon Overview Effects
CHARACTERISATION OF EXPLOSIVE WEAPONS EXPLOSIVEEXPLOSIVE WEAPON EFFECTSWEAPON OVERVIEW EFFECTS FINAL REPORT ABOUT THE GICHD AND THE PROJECT The Geneva International Centre for Humanitarian Demining (GICHD) is an expert organisation working to reduce the impact of mines, cluster munitions and other explosive hazards, in close partnership with states, the UN and other human security actors. Based at the Maison de la paix in Geneva, the GICHD employs around 55 staff from over 15 countries with unique expertise and knowledge. Our work is made possible by core contributions, project funding and in-kind support from more than 20 governments and organisations. Motivated by its strategic goal to improve human security and equipped with subject expertise in explosive hazards, the GICHD launched a research project to characterise explosive weapons. The GICHD perceives the debate on explosive weapons in populated areas (EWIPA) as an important humanitarian issue. The aim of this research into explosive weapons characteristics and their immediate, destructive effects on humans and structures, is to help inform the ongoing discussions on EWIPA, intended to reduce harm to civilians. The intention of the research is not to discuss the moral, political or legal implications of using explosive weapon systems in populated areas, but to examine their characteristics, effects and use from a technical perspective. The research project started in January 2015 and was guided and advised by a group of 18 international experts dealing with weapons-related research and practitioners who address the implications of explosive weapons in the humanitarian, policy, advocacy and legal fields. This report and its annexes integrate the research efforts of the characterisation of explosive weapons (CEW) project in 2015-2016 and make reference to key information sources in this domain. -

PD544 Point Detonating Artillery Fuze
PD544 Point Detonating Artillery Fuze for high explosive (HE), base bleed and rocket assisted artillery shells PD544 The PD544 is a mechanical point deto- penetration when the mode setter is set The fuze consists of the nating artillery fuze with super-quick and to “DELAY”. When not set to “DELAY”, the following major compo- delay functions. IDD provides a back-up function for the nents: SQ setting. It has been designed and qualified for • Upper fuze body use with 105 mm and 155 mm high • Lower fuze body explosive artillery shells, including exten- • Mode Setter ded range and base bleed ammunition. • Impact Delay Device The fuze is suitable for use with 39, 45 (IDD) and 52 calibre weapon systems and is • Safety and Arming safe and suitable for flick-ramming. The Device (SAD) fuze has also been designed and qualified • Booster assembly for use with 120 mm rifled mortars, providing full function at all charges including charge 0. The fuze design incorporates a fully Insensitive Munitions (IM) compliant firing train which provides enhanced safety during storage, transportation and operational use. Fuze arming is initiated by transitional and rotational forces after firing, with the fuze rotor moving in-line immediately after the muzzle safety distance has been achieved. The firing pin and SQ detonator assem- bly provide the super-quick action upon impact. The Impact Delay Device (IDD) is located in the rear part of the fuze and provides a 60 ms fuze initiation delay for target GmbH - *ld 07/16 Microtec Technical Data PD544 JUNGHANS © Muzzle safety ≥ 200 m (155 mm gun) JUNGHANS Microtec GmbH ≥ 150 m (105 mm gun) Unterbergenweg 10 Required setback for arming ≥ 850 g 78655 Dunningen-Seedorf Germany Max. -

Merle A. Tuve
NATIONAL ACADEMY OF SCIENCES M E R L E A N T O N Y T UVE 1901—1982 A Biographical Memoir by P H ILI P H . AbELSON Any opinions expressed in this memoir are those of the author(s) and do not necessarily reflect the views of the National Academy of Sciences. Biographical Memoir COPYRIGHT 1996 NATIONAL ACADEMIES PRESS WASHINGTON D.C. MERLE ANTONY TUVE June 27, 1901–May 20, 1982 BY PHILIP H. ABELSON ERLE ANTONY TUVE WAS a leading scientist of his times. MHe joined with Gregory Breit in the first use of pulsed radio waves in the measurement of layers in the ionosphere. Together with Lawrence R. Hafstad and Norman P. Heydenburg he made the first and definitive measurements of the proton-proton force at nuclear distances. During World War II he led in the development of the proximity fuze that stopped the buzz bomb attack on London, played a crucial part in the Battle of the Bulge, and enabled naval ships to ward off Japanese aircraft in the western Pacific. Following World War II he served for twenty years as director of the Carnegie Institution of Washington’s Department of Ter- restrial Magnetism, where, in addition to supporting a mul- tifaceted program of research, he personally made impor- tant contributions to experimental seismology, radio astronomy, and optical astronomy. Tuve was a dreamer and an achiever, but he was more than that. He was a man of conscience and ideals. Throughout his life he remained a scientist whose primary motivation was the search for knowledge but a person whose zeal was tempered by a regard for the aspirations of other humans. -

Federal Register/Vol. 84, No. 250/Tuesday, December 31, 2019
Federal Register / Vol. 84, No. 250 / Tuesday, December 31, 2019 / Notices 72339 (vii) Date Report Delivered to ACTION: Arms sales notice. House of Representatives, Transmittal Congress: December 4, 2019 18–39 with attached Policy Justification [FR Doc. 2019–28189 Filed 12–30–19; 8:45 am] SUMMARY: The Department of Defense is and Sensitivity of Technology. publishing the unclassified text of an BILLING CODE 5001–06–P Dated: December 23, 2019. arms sales notification. Aaron T. Siegel, FOR FURTHER INFORMATION CONTACT: Alternate OSD Federal Register Liaison DEPARTMENT OF DEFENSE Karma Job at [email protected] Officer, Department of Defense. or (703) 697–8976. Office of the Secretary BILLING CODE 5001–06–P SUPPLEMENTARY INFORMATION: This [Transmittal No. 18–39] 36(b)(1) arms sales notification is Arms Sales Notification published to fulfill the requirements of section 155 of Public Law 104–164 AGENCY: Defense Security Cooperation dated July 21, 1996. The following is a Agency, Department of Defense. copy of a letter to the Speaker of the VerDate Sep<11>2014 17:30 Dec 30, 2019 Jkt 250001 PO 00000 Frm 00048 Fmt 4703 Sfmt 4703 E:\FR\FM\31DEN1.SGM 31DEN1 khammond on DSKJM1Z7X2PROD with NOTICES 72340 Federal Register / Vol. 84, No. 250 / Tuesday, December 31, 2019 / Notices BILLING CODE 5001–06–C Norway, Poland, Portugal, Spain and Major Defense Equipment (MDE): Transmittal No. 18-39 the United Kingdom Five hundred (500) KMU-556 F/B Joint Notice of Proposed Issuance of Letter of (ii) Total Estimated Value: Direct Attack Munition (JDAM) Kits for GBU-31 2000-lbs Offer Pursuant to Section 36(b)(1) of the Major Defense Equip- $240.5 million ment *. -

Low Cost Guidance and Control Solution for In-Service Unguided 155 Mm Artillery Shell
Low cost guidance and control solution for in-service unguided 155 mm artillery shell Eric Gagnon Marc Lauzon DRDC Valcartier Defence R&D Canada – Valcartier Technical Report DRDC Valcartier TR 2008-333 July 2009 Low cost guidance and control solution for in-service unguided 155 mm artillery shell Eric Gagnon Marc Lauzon DRDC Valcartier Defence R&D Canada – Valcartier Technical Report DRDC Valcartier TR 2008-333 July 2009 Principal Author Original signed by Eric Gagnon Eric Gagnon Scientist Approved by Original signed by Alexandre Jouan Alexandre Jouan Head, Precision Weapons Section Approved for release by Original signed by Christian Carrier Christian Carrier Chief Scientist © Her Majesty the Queen in Right of Canada, as represented by the Minister of National Defence, 2009 © Sa Majesté la Reine (en droit du Canada), telle que représentée par le ministre de la Défense nationale, 2009 Abstract …….. Guidance and control of artillery projectiles will be critical to future military operations. With the large quantities of unguided artillery shells stockpiled around the world, the course correction fuze could provide an attractive and cost-effective solution for munition control. This report proposes a drag brake and a spin brake course correction fuze concept, and compares their performance against the roll-decoupled four canard configuration. Specific guidance and control functions were designed and tuned for each using the 155 mm spin-stabilized artillery projectile as baseline. Dispersion sources included variations in muzzle velocity and gun’s azimuth and elevation angles relative to nominal conditions, and wind velocity perturbations. Monte Carlo simulations were performed to analyze the delivery accuracy. Results show that the drag brake concept compensates for muzzle velocity and longitudinal wind perturbations efficiently. -

A History of the National Bureau of Standards
WORLD WAR Ii RESEARCH (1941-45) CHAPTER 'TI! ThE EVENT OF WAR" The second worldwide war was foreshadowed in the Japanese in of Ethiopia in 1935, and Hitler's march into the Rhineland in 1936. Isolated and safeguarded by successive Neutrality Acts passed in 1935, 1936, and 1937, which barred the sale of arms or munitions to any warring nation, America watched the piecemeal fall of small nations, Austria and Czechoslovakia to Hitler, Albania to Musso- lini. With the German attack on Poland in September 1939, Britain and France declared war against the dictators and World War II began. The first amendments to the Neutrality Acts were enacted. By temperament strongly neutral and still in the grip of depression, the Nation had willed belief in Chamberlain's "peace in our time" until shaken by the occupation of Czechoslovakia in the spring of 1939. But cer- tain of war and of America's inevitable involvement was the small band of foreign-born scientists, their spokesman Niels Bohr, who had recently arrived in this country. Shepherding atomic research here, Bohn at once urged restriction in all Allied countries of the publication of further data on the possibility of nuclear fission. Many individual scientists refrained, but control of publication in American scientific journals did not become effec. five until almost a year later, following Hitler's invasion of Denmark and Norway. The National Bureau of Standards, convinced by the physicists on its Advisory Committee on Uranium of the certainty of a general war, began to put its affairs in order. On September 1, 1939, the day Germany marched into Poland, and one week before the President declared a state of limited national emergency, Dr. -

In Defense of Freedom-The Early Years
WALTER G. BERL IN DEFENSE OF FREEDOM - THE EARLY YEARS This article describes the events that led to the founding of the Applied Physics Laboratory. It summarizes the development of a novel fuze for rotating antiaircraft ammunition and the organization that achieved it, continues with a discussion of the early stages of the development of a new technology for the delivery of warheads-the guided missile, and concludes with a brief sketch of Merle A. Tuve' s career that led to his involvement with these programs. INTRODUCTION On 11 September 1939, only ten days after the German days from near the city to the Channel coast where they army invaded Poland and World War II began, President could function more effectively) and proximity-fuzed Franklin D. Roosevelt sent the first of many notes to shells were deployed for the first time in the European Winston Churchill in which he proposed that Churchill theater, only one in twenty of the flying bombs succeeded reply with "anything you may want me to know about."! in their mission. In early September, the V-I launching One such message, No. 831, from Churchill to President sites were captured by the advancing Allied forces and Roosevelt, dated 26 November 1944, read: the V-I attacks ceased.2 Halfway around the world, in the Pacific, a similar Cherwell [Churchill's Science Advisor] has told me how very drama was unfolding. In October 1944, strong American kind the US Army and Navy were in showing him their latest developments in many fields .... Perhaps, if you thought it forces appeared in the Leyte Gulf in the Philippines. -
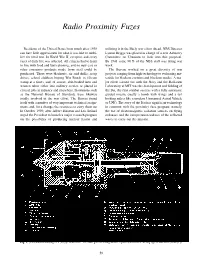
Radio Proximity Fuzes
Radio Proximity Fuzes Residents of the United States born much after 1930 utilizing it in the likely war effort ahead, NBS Director can have little appreciation for what it was like to mobi- Lyman Briggs was placed in charge of a new Advisory lize for total war. In World War II, everyone and every Committee on Uranium to look into this proposal. facet of daily life was affected. All citizens had to learn By 1941 some 90 % of the NBS staff was doing war to live with food and fuel rationing, and no new cars or work. other consumer products made from steel could be The Bureau worked on a great diversity of war purchased. There were blackouts, air raid drills, scrap projects ranging from high technology to evaluating ma- drives, school children buying War Bonds (a 10 cent terials for blackout curtains and blackout masks. A ma- stamp at a time), and, of course, able-bodied men and jor effort carried out with the Navy and the Radiation women taken either into military service or placed in Laboratory at MIT was the development and fielding of critical jobs in industry and elsewhere. Institutions such the Bat, the first combat success with a fully automatic as the National Bureau of Standards were likewise guided missile (really a bomb with wings and a tail totally involved in the war effort. The Bureau found looking rather like a modern Unmanned Aerial Vehicle itself with a number of very important technical assign- or UAV).The story of the Bat has significant technology ments and, for a change, the resources to carry them out in common with the proximity fuze program; namely, In October 1939, after Albert Einstein and Leo Szilard the use of electromagnetic radiation sources on flying urged the President to launch a major research program ordnance and the interpretation and use of the reflected on the possibility of producing nuclear fission and waves to carry out the mission. -
Identification of Artillery Projectiles
IDENTIFICATION OF ARTILLERY. PROJECTILES (WITH ADDENDA) SECOND EDITION RESTRICTED Published by VI Corps June 1944. Republished with Addenda as Second Edition by Seventh^Army Auq 1944 INDEX Preface .......................................................... 2 Sample Shelling Report Form ..........................3 Sec. I - GERMAN................................................ 5 Abbreviations and Nomenclature . 6 Chart: Details of Rotating Bands . 46 Sec. II - ITALIAN.......................................... 51 Chart: Details of Rotating Bands . 57 Sec. I l l - B R IT IS H .......................................6l Chart: Details of Rotating Bands . 65 Sec. IV - AMERICAN.......................................67 Chart: Details of Rotating Bands . 73 Sec. V - MISCELLANEOUS................................75 ADDENDA ............................................................ 79 Inch and Centimeter scale inside back cover. PRgACt. Information included in this booklet haa been compiled from a ll available Intelligence sources, including many original drawings sub mitted by Arty S-2a. No e ffo rt haa been made to indicate the sources o f this information. The measurements on the drawings and in the charts are believed to be reasonably accurate; however, minor varia tions may exist. Binfcmy a rtille ry a ctivity in HALT reached new heights on the ANZ10 Beachhead. Not only have the forward units been shelled continuously, but rear areas including Army, Corps, Air Corps, and Naval installations have been shelled interm ittently with heavy caliber guns. Due to the semi-circular front o f approx 30 miles we have encountered shelling from every direction, and from weapons ranging from the lig h t 75-mm Hecoilless gun to 28-cm super-heavy railway gun. Also, the enemy has used many d iffe re n t types of arty captured from the Russians, Italian s and French.