Einsatzbereiche Von Bus Und Strassenbahn
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
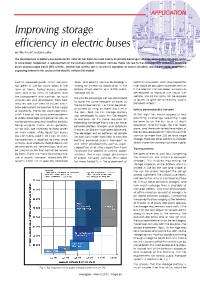
Improving Storage Efficiency in Electric Buses by Mike Rycroft, Features Editor
Improving storage efficiency in electric buses by Mike Rycroft, features editor The development of battery powered electric vehicles has been focused mainly on private passenger vehicles, while public transport seems to have been neglected. A reassessment of the journeys public transport vehicles make has led to the development of battery powered buses and bus rapid transit (BRT) systems. Several trial systems are in successful operation at various locations around the world, and there is a growing interest in this sector of the electric vehicle (EV) market. Electric powered public mass transport lanes, and electric vehicle technology is batteries and super- and ultra-capacitors has been in use for many years in the finding an increasing application in the than would be possible in a private vehicle. form of trams, trolley buses, subway battery driven electric bus (BDEB) public If the electric car has been successfully trains and other forms of transport, and transport sector. developed to replace the liquid fuel the components and controls for such vehicle, should the same not be applied The electric passenger car was developed vehicles are well developed. Tram-type to buses to give an all-electric public to have the same freedom of travel as vehicles are confined to routes which transport system? the liquid fuel version, i.e. it can be driven allow permanent connection to the supply anywhere as long as there was fuel in Battery powered public transport of electricity, mainly by overhead wires, the tank, and the EVs storage battery which have all the associated problems was developed to allow this. -
The Demand for Public Transport: a Practical Guide
The demand for public transport: a practical guide R Balcombe, TRL Limited (Editor) R Mackett, Centre for Transport Studies, University College London N Paulley, TRL Limited J Preston, Transport Studies Unit, University of Oxford J Shires, Institute for Transport Studies, University of Leeds H Titheridge, Centre for Transport Studies, University College London M Wardman, Institute for Transport Studies, University of Leeds P White, Transport Studies Group, University of Westminster TRL Report TRL593 First Published 2004 ISSN 0968-4107 Copyright TRL Limited 2004. This report has been produced by the contributory authors and published by TRL Limited as part of a project funded by EPSRC (Grants No GR/R18550/01, GR/R18567/01 and GR/R18574/01) and also supported by a number of other institutions as listed on the acknowledgements page. The views expressed are those of the authors and not necessarily those of the supporting and funding organisations TRL is committed to optimising energy efficiency, reducing waste and promoting recycling and re-use. In support of these environmental goals, this report has been printed on recycled paper, comprising 100% post-consumer waste, manufactured using a TCF (totally chlorine free) process. ii ACKNOWLEDGEMENTS The assistance of the following organisations is gratefully acknowledged: Arriva International Association of Public Transport (UITP) Association of Train Operating Companies (ATOC) Local Government Association (LGA) Confederation of Passenger Transport (CPT) National Express Group plc Department for Transport (DfT) Nexus Engineering and Physical Sciences Research Network Rail Council (EPSRC) Rees Jeffery Road Fund FirstGroup plc Stagecoach Group plc Go-Ahead Group plc Strategic Rail Authority (SRA) Greater Manchester Public Transport Transport for London (TfL) Executive (GMPTE) Travel West Midlands The Working Group coordinating the project consisted of the authors and Jonathan Pugh and Matthew Chivers of ATOC and David Harley, David Walmsley and Mark James of CPT. -

Electric Buses in Urban Transport—The Situation and Development Trends
June 2014, Volume 2, No. 1 (Serial No. 2), pp. 45-58 Journal of Traffic and Transportation Engineering, ISSN 2328-2142, USA D DAVID PUBLISHING Electric Buses in Urban Transport—The Situation and Development Trends Jakub Slavík Self-employed business consultant, Říčany u Prahy 25101, Czech Republic Abstract: A study called “E-mobilita v MHD” (e-mobility in urban mass transit) has been conducted by the author’s private consultancy to inform Czech public transport operators about the technologies and operational experience to date and stimulate the e-bus utilization as well as their involvement in e-bus research and development projects. The study covers trolley-buses, diesel hybrids and e-buses including fuel cell buses. These electric urban buses have been compared with combustion engine vehicles represented by diesel and CNG (compressed natural gas) buses, in terms of energy consumption and cost, greenhouse gas emissions, noise and life cycle cost. Relations between urban transport e-mobility and the “smart grid” concept have been presented as well. Comprehensive reports prepared on the European Union and the USA levels have been the basis for the study, completed by information from the field research, focused especially on the bus operational reliability and other parameters important for a transport operator and covering, interalia, 12 case studies. The results show electric buses as a promising urban transport mode with massive technology development overcoming their operational limitations. Synergies between electric buses and other urban systems, such as power supply, are notable as well. Key words: Electric bus, trolley-bus, fuel cell bus, charging, urban transport. -

Efficiency Analysis of İzmir Metro in Its Current State MASTER of CITY PLANNING
Efficiency Analysis of İzmir Metro in Its Current State By Ömer SELVİ A Dissertation Submitted to the Graduate School in Partial Fulfillment to the Requirements for the Degree of MASTER OF CITY PLANNING Department: City and Regional Planning Major: City Planning İzmir Institute of Technology İzmir, Turkey September, 2002 We approve the thesis of Ömer SELVİ Date of Signature …………………………………… 19.09.2002 Assoc. Prof. Dr. Güneş GÜR Supervisor Department of City and Regional Planning …………………………………… 19.09.2002 Assist. Prof. Dr. Yavuz DUVARCI Department of City and Regional Planning …………………………………… 19.09.2002 Assoc. Prof. Dr. Özen EYÜCE Department of Architecture …………………………………… 19.09.2002 Prof. Dr. Akõn SÜEL Head of Department ACKNOWLEDGEMENT I would express firstly great thanks to my supervisor Assoc. Prof. Dr. Güneş GÜR for having accepted me to prepare this master thesis. I would also thank to Assist. Prof. Dr. Yavuz DUVARCI for his theoretical support during the process of this study. I would express heartfelt thanks to my dearest Evrim GÜÇER who made a serious contribution and support while preparing the thesis. I am also in debt to Ali Kemal ÇINAR for computer support. I am deeply grateful to; İBŞB staff; Ilgaz CANDEMİR, Emre ORAL, Esin TÜRSEN and Orhan KESLER for their help to enable data access. Ömür SAYGIN for GIS database support. Rose GANDEE, information specialist of APTA, for sending books. Özgür İMRE for his help throughout printing process. Finally, I would like to thank to my fellow Mehmet BAŞOĞLU for his help in land survey. i ABSTRACT This thesis analyzes the efficiency of the current state of İzmir Metro System by using the Method of Comparative Benchmarking. -

Buses That We Don't Have Current Details For
Check List - buses that we don't have current details for The main lists on our website show the details of the many thousands of open top buses that currently exist throughout the world, and those that are listed as either scrapped or for scrap. However, there are a number of buses in our database that we don’t have current details for, that could still exist or have been scrapped. The buses listed on this page are those that we need to confirm the location and status of. These buses do not appear on any of our other lists, so if you're looking for a particular vehicle, it could be here. Please have a look at this page and if you can update any of it, even if only a small piece of information that helps to determine where a bus is now, then please contact us using the link button on the Front Page. The buses are divided into lists in Chassis manufacturer order. ? REG NO / LICENCE PLATE CHASSIS BODY STATUS/LAST KNOWN OWNER J2374 ? ? Last reported with JMT in 1960s, no further trace AEC Regent REG NO / LICENCE PLATE CHASSIS BODY STATUS/LAST KNOWN OWNER AUO 90 AEC Regent Unidentified Devon General AUO 91 AEC Regent Unidentified Devon General GW 6276 AEC Regent Brighton & Hove Acquired by Southern Vectis (903) from Brighton Hove and District in 1955. Sold, 1960, not traced further. GW 6277 AEC Regent Brighton & Hove Acquired by Southern Vectis (902) from Brighton Hove and District in 1955, never entered service, disposed of in 1957. -

Peak Demand Charges and Electric Transit Buses White Paper
U.S. Department of Transportation Federal Transit Administration Peak Demand Charges and Electric Transit Buses White Paper Prepared by: Jean-Baptiste Gallo, Ted Bloch-Rubin & Jasna Tomić CALSTART (626) 744-5605 (work) (626) 744-5610 (fax) [email protected] 10/1/2014 Peak Demand Charges and Electric Transit Buses White Paper Disclaimer This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. 1 Peak Demand Charges and Electric Transit Buses White Paper Table of Contents Table of Contents .............................................................................................................................................................. 2 List of Figures ..................................................................................................................................................................... -

TCQSM Part 8
Transit Capacity and Quality of Service Manual—2nd Edition PART 8 GLOSSARY This part of the manual presents definitions for the various transit terms discussed and referenced in the manual. Other important terms related to transit planning and operations are included so that this glossary can serve as a readily accessible and easily updated resource for transit applications beyond the evaluation of transit capacity and quality of service. As a result, this glossary includes local definitions and local terminology, even when these may be inconsistent with formal usage in the manual. Many systems have their own specific, historically derived, terminology: a motorman and guard on one system can be an operator and conductor on another. Modal definitions can be confusing. What is clearly light rail by definition may be termed streetcar, semi-metro, or rapid transit in a specific city. It is recommended that in these cases local usage should prevail. AADT — annual average daily ATP — automatic train protection. AADT—accessibility, transit traffic; see traffic, annual average ATS — automatic train supervision; daily. automatic train stop system. AAR — Association of ATU — Amalgamated Transit Union; see American Railroads; see union, transit. Aorganizations, Association of American Railroads. AVL — automatic vehicle location system. AASHTO — American Association of State AW0, AW1, AW2, AW3 — see car, weight Highway and Transportation Officials; see designations. organizations, American Association of State Highway and Transportation Officials. absolute block — see block, absolute. AAWDT — annual average weekday traffic; absolute permissive block — see block, see traffic, annual average weekday. absolute permissive. ABS — automatic block signal; see control acceleration — increase in velocity per unit system, automatic block signal. -

Market Inquiry Into Land Based Public Passenger Transport Main Report
MARKET INQUIRY INTO LAND BASED PUBLIC PASSENGER TRANSPORT MAIN REPORT NON-CONFIDENTIAL VERSION 19 February 2020 i Table of Contents Table of Contents .................................................................................................................................... ii List of figures .......................................................................................................................................... iv List of Abbreviations ................................................................................................................................ v EXECUTIVE SUMMARY ........................................................................................................................ 1 1. MARKET INQUIRY PROCESS................................................................................................... 1 2. BACKGROUND TO THE PUBLIC TRANSPORT SECTOR IN SOUTH AFRICA ...................... 9 3. REGULATORY FRAMEWORK................................................................................................. 26 4. PUBLIC TRANSPORT AS AN INTEGRATED SYSTEM .......................................................... 41 5. SUBSIDIES IN THE PUBLIC TRANSPORT SECTOR ............................................................. 61 6. THE RAIL SECTOR .................................................................................................................. 91 7. SUBSIDISED BUS CONTRACTS IN URBAN AREAS ........................................................... 126 8. RURAL TRANSPORTATION AND -

Fuel Cells in Transit Buses Summary
Fuel Cells in Transit Buses Summary Transit buses are widely viewed as one of the best strategies for commercializing fuel cells for vehicles and transitioning to a hydrogen economy. Many advantages have been identified regarding the use of transit buses as fuel cell platforms. For example: • Transit buses have well-defined duty cycles, centralized fueling and maintenance infrastructure, and dedicated maintenance personnel; • Transit buses are large, providing ample room to install the fuel cell and related components; • Diesel transit buses are noisy and polluting, providing fuel cells with an opportunity to make significant performance improvements; • Transit bus manufacturers generally do not develop their own power plant technologies, not even diesel engines. Thus, they are accustomed to working with power plant manufacturers to accommodate new technologies; • Transit agencies are subsidized by the government, thus helping to defray most of the risks and costs of technology development; • Transit buses are highly visible in the community, providing an excellent showcase for fuel cells; and • Fuel cell transit technology can readily be transferred to other medium- and heavy-duty vehicle applications. As a result, governments in North America, Europe, and Asia are supporting many demonstrations of fuel cell buses, causing the number of fuel cell buses to grow at an almost exponential pace. In 2003 alone, the number of fuel cell buses built and operated doubled, bringing the total to around 65 worldwide. The demonstrations are designed to prove the technology in revenue service and collect data on operations and maintenance costs, performance, and reliability. Nearly all of the modern buses are powered by PEM fuel cells. -

VTT Technology 348: Electric Commercial Vehicles (ECV)
Electric Commercial Vehicles (ECV) Final report VTT TECHNOLOGY Transport and mobility are in the middle of a major transition to 3 4 8 large-scale electrification of a large range of vehicles, mobility use cases and fleets. Energy efficiency and low emissions are the main benefits of electrical propulsion. With the continuing development of the key technologies, system implementations and new business models, the economic benefits are also emerging fast - first in professional and commercial operation and fleets, later in private mobility. This report summarises main results and findings from a Finnish project entity Electric Commercial Vehicles (ECV). Even though both technology and business in this field are developing rapidly, many of the project's results, produced during 2012–2016, are still surprisingly valid. Electric C o m m ercial Vehicles (E C V) Electric Commercial Vehicles (ECV) Final report ISBN 978-951-38-8681-3 ISSN-L 2242-1211 ISSN 2242-122X (Online) Mikko Pihlatie | Jenni Pippuri-Mäkeläinen (eds.) DOI: 10.32040.2242-122X.2019.T348 VTT TECHNOLOGY 348 VTT TECHNOLOGY 348 Electric Commercial Vehicles (ECV) Final report Mikko Pihlatie & Jenni Pippuri-Mäkeläinen (eds.) VTT Technical Research Centre of Finland Ltd ISBN 978-951-38-8681-3 VTT Technology 348 ISSN-L 2242-1211 ISSN 2242-122X (Online) DOI: 10.32040/2242-122X.2019.T348 Copyright © VTT 2019 JULKAISIJA – PUBLISHER VTT PL 1000 02044 VTT Puh. 020 722 111 https://www.vtt.fi VTT P.O. Box 1000 FI-02044 VTT, Finland Tel. +358 20 722 111 https://www.vttresearch.com Cover image: VTT Technical Research Centre of Finland Ltd Preface This report gives a broad overview of the work carried out during Electric Commer- cial Vehicles (ECV) -project. -

Irisbus Iveco at the 57Th UITP World Congress and Exhibition a Modern
Irisbus Iveco at the 57th UITP World Congress and Exhibition Irisbus Iveco presents at the UITP 2007 (The International Association of Public Transport), opening today in Helsinki, its latest developments for Public Transport. Its commitment confirms Irisbus Iveco’s position as leader in the area of city buses and is in keeping with its future plans for lasting development, preservation of the environment and protection of the individual. Within this framework, Irisbus Iveco offers public transport authorities and operators a very wide selection of: vehicles adapted to all transport capacities, from the minibus to the guided articulated system and energy solutions for a city space that is more pleasant to inhabit. A Modern, varied range Irisbus Iveco offers its customers a highly diversified range, capable of meeting all the needs of public transport authorities: - The minibus Daily, midibus EuroPolis and standard buses GX 127, GX 327 and Citelis, articulated bus Citelis, articulated and standard trolleybuses Cristalis and Citelis and Crossway LE (Low Entry) bus; - Built-up vehicles or available partly knocked down or in the form of a chassis for local bodywork (Daily, Citelis, EuroRider and EuroRider LE); - Choice of different energy sources: diesel engines Euro 4, Euro 5, EEV, natural gas engine, bio-diesel, electric propulsion; - BHNS (Bus à Haut Niveau de Service, High Service Level Bus) type transport systems with optical guidance (Civis and Crealis). Besides Irisbus Iveco offers a vast range of bus chassis for bodywork according to the local specifications and requirements of the countries where they may be operated. This offer covers three aspects: Iveco Press Office Via Puglia 35, 10156 Torino, Italy www. -

TOSA – Concept a Full Electric Large Capacity Urban Bus System Abstract
Swiss mobility days, Martigny, 07.04.2016, Olivier Augé/Global Product Manager & Innovation Agent ,ABB Sécheron TOSA – Concept A full electric large capacity urban bus system Abstract 15 seconds is the time needed at bus stops to disembark and embark passengers. That’s also the time we need to put some energy into the full electric TOSA large capacity bus. Like a trolleybus, the TOSA bus collects the required energy during its journey, but without overhead lines. Like an overnight charging battery bus, TOSA has autonomy to ensure the service, but with a small and long-life battery - no oversizing and limited recycling. At first glance, it looks like a paradox, but by selecting the appropriate technology and ensuring management of energy within the most optimal operating range means that a small battery has a much longer life time than the one used in an overnight charging battery bus. The technical architecture of this opportunity-charging principle, that we call Flash charging, will be presented along with its operational, economical and energy efficiency requirements. To achieve the energy transfer in such a short time, this bus has a laser controlled moving arm that connects to an overhead receptacle at some bus stops, e.g. every forth in Line 23. The docking procedure is fast, achieved in less than a second. The first TOSA articulated bus has been running in Geneva since May 2013. Concept and experience from the field will be shared, as well as the configuration for deployment on the full line 23 in Geneva by 2017. © ABB April 15,