VTT Technology 348: Electric Commercial Vehicles (ECV)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
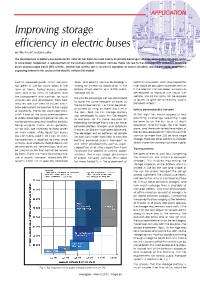
Improving Storage Efficiency in Electric Buses by Mike Rycroft, Features Editor
Improving storage efficiency in electric buses by Mike Rycroft, features editor The development of battery powered electric vehicles has been focused mainly on private passenger vehicles, while public transport seems to have been neglected. A reassessment of the journeys public transport vehicles make has led to the development of battery powered buses and bus rapid transit (BRT) systems. Several trial systems are in successful operation at various locations around the world, and there is a growing interest in this sector of the electric vehicle (EV) market. Electric powered public mass transport lanes, and electric vehicle technology is batteries and super- and ultra-capacitors has been in use for many years in the finding an increasing application in the than would be possible in a private vehicle. form of trams, trolley buses, subway battery driven electric bus (BDEB) public If the electric car has been successfully trains and other forms of transport, and transport sector. developed to replace the liquid fuel the components and controls for such vehicle, should the same not be applied The electric passenger car was developed vehicles are well developed. Tram-type to buses to give an all-electric public to have the same freedom of travel as vehicles are confined to routes which transport system? the liquid fuel version, i.e. it can be driven allow permanent connection to the supply anywhere as long as there was fuel in Battery powered public transport of electricity, mainly by overhead wires, the tank, and the EVs storage battery which have all the associated problems was developed to allow this. -

Peak Demand Charges and Electric Transit Buses White Paper
U.S. Department of Transportation Federal Transit Administration Peak Demand Charges and Electric Transit Buses White Paper Prepared by: Jean-Baptiste Gallo, Ted Bloch-Rubin & Jasna Tomić CALSTART (626) 744-5605 (work) (626) 744-5610 (fax) [email protected] 10/1/2014 Peak Demand Charges and Electric Transit Buses White Paper Disclaimer This report was prepared as an account of work sponsored by an agency of the United States Government. Neither the United States Government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States Government or any agency thereof. 1 Peak Demand Charges and Electric Transit Buses White Paper Table of Contents Table of Contents .............................................................................................................................................................. 2 List of Figures ..................................................................................................................................................................... -

TOSA – Concept a Full Electric Large Capacity Urban Bus System Abstract
Swiss mobility days, Martigny, 07.04.2016, Olivier Augé/Global Product Manager & Innovation Agent ,ABB Sécheron TOSA – Concept A full electric large capacity urban bus system Abstract 15 seconds is the time needed at bus stops to disembark and embark passengers. That’s also the time we need to put some energy into the full electric TOSA large capacity bus. Like a trolleybus, the TOSA bus collects the required energy during its journey, but without overhead lines. Like an overnight charging battery bus, TOSA has autonomy to ensure the service, but with a small and long-life battery - no oversizing and limited recycling. At first glance, it looks like a paradox, but by selecting the appropriate technology and ensuring management of energy within the most optimal operating range means that a small battery has a much longer life time than the one used in an overnight charging battery bus. The technical architecture of this opportunity-charging principle, that we call Flash charging, will be presented along with its operational, economical and energy efficiency requirements. To achieve the energy transfer in such a short time, this bus has a laser controlled moving arm that connects to an overhead receptacle at some bus stops, e.g. every forth in Line 23. The docking procedure is fast, achieved in less than a second. The first TOSA articulated bus has been running in Geneva since May 2013. Concept and experience from the field will be shared, as well as the configuration for deployment on the full line 23 in Geneva by 2017. © ABB April 15, -

Estudio Autobuses Cero Emisionesdescargar
Dwarsverband Estudio de autobuses interurbanos de cero emisiones para Mallorca Dr. R.J.F. Hoogma Dwarsverband Febrero 2018 Energy Mobility Sustainability - Research Consultancy Innovation 1. Introducción................................................................................................................. 4 1.1 Meta ............................................................................................................................ 4 1.2 El método propuesto para el estudio ............................................................................ 4 1.3 Contenidos de este informe ......................................................................................... 5 2. Análisis de tipologías de servicios actuales del TIB ................................................. 6 2.1 Tipologías de servicios TIB .......................................................................................... 6 2.2 Caracterización de la oferta ......................................................................................... 7 2.3 Ejemplos de vehículos actuales usados ....................................................................... 8 2.4 Número de buses por tipología .................................................................................... 8 2.5 Caracterización de la demanda.................................................................................... 9 3. Tecnologías más sostenibles para autobuses ......................................................... 10 3.1 Cartera de tecnologías sostenibles para -
Real World Performance of Hybrid and Electric Buses
Real World Performance of Hybrid and Electric Buses Environmental and Financial Performance of Hybrid and Battery Electric Transit Buses Based on Real World Performance of Large Operational Fleets Jürg M. Grütter Grütter Consulting October 2014 [email protected] www.transport-ghg.com Hybrid and Electric Buses Contents Abbreviations .....................................................................................................................................4 1. Introduction ....................................................................................................................................5 1.1. Background ..............................................................................................................................5 1.2. Objective ..................................................................................................................................5 1.3. Contents ..................................................................................................................................6 1.4. Repic and Grütter Consulting ....................................................................................................6 2. Comparison Cities ...........................................................................................................................7 2.1. Introduction .............................................................................................................................7 2.2. Overview Cities ........................................................................................................................7 -

Einsatzbereiche Von Bus Und Strassenbahn
Research Collection Doctoral Thesis Energetischer Systemvergleich von Diesel-, Hybrid- und Elektrobussen Author(s): Schwertner, Michael Publication Date: 2017 Permanent Link: https://doi.org/10.3929/ethz-b-000206395 Rights / License: In Copyright - Non-Commercial Use Permitted This page was generated automatically upon download from the ETH Zurich Research Collection. For more information please consult the Terms of use. ETH Library DISS. ETH Nr. 24573 Energetischer Systemvergleich von Diesel-, Hybrid- und Elektrobussen Abhandlung zur Erlangung des Titels DOKTOR DER WISSENSCHAFTEN der ETH ZÜRICH (Dr. sc. ETH Zürich) vorgelegt von Michael Schwertner Dipl.-Ing., Technische Universität Dresden geboren am 26.04.1979 von Deutschland angenommen auf Antrag von Prof. Dr. Ulrich Weidmann Prof. Dr.-Ing. Arnd Stephan Dr. Steffen Schranil 2017 Vorwort Wenn von Elektromobilität die Rede ist, sind überwiegend Massnahmen öffent- lichkeitswirksam, welche die Elektrifizierung des motorisierten Individualver- kehrs voranbringen sollen. Weniger bekannt ist hingegen, dass zum Themenfeld «Elektromobilität» auch zahlreiche Projekte des öffentlichen Verkehrs gehören, die das Ziel verfolgen, dessen Umweltfreundlichkeit weiter zu verbessern. Im Gegensatz zum schienengebundenen Stadtverkehr besteht im Busverkehr nach wie vor eine grosse Abhängigkeit von fossilen Energieträgern, weshalb derzeit verschiedene Antriebssysteme erprobt werden, wobei nicht absehbar ist, welches sich schliesslich durchsetzen wird. Bei den Versuchseinsätzen liegt der Fokus, neben dem Nachweis -

Exploring Low-Carbon Bus Options for Urban BRT Systems: the Case of Amman Journal of Public Transportation
Journal of Public Transportation | scholarcommons.usf.edu/jpt Vol. 22 No. 1 [2020] pp. 57-75 Exploring Low-Carbon Bus Options for Urban BRT Systems: The Case of Amman Journal of Public Transportation Exploring Low-Carbon Bus Options for Urban BRT Systems: The Case of Amman Rana Imam The University of Jordan Seong-Cheol Kang and Diana Quezada Global Green Growth Institute Abstract Being able to provide high-quality, metro-like transit service at a fraction of the cost of other options, bus rapid transit (BRT) has been viewed as one of the most cost-effective public mass transport systems suitable for urban areas. Since significant amounts of greenhouse gas (GHG) and air pollutant emissions are attributed to the transport sector, deploying low-carbon buses for BRT systems should be of high priority. With a view to promoting low-carbon buses instead of diesel buses for a BRT system currently being planned in Amman, Jordan, this paper evaluates several low-carbon bus options—hybrid, plug-in hybrid, opportunity charging, trolleybus, and battery electric bus—against the baseline case of diesel buses. While low-carbon buses reduce GHG and air pollutant emissions often considerably, they usually require higher upfront capital costs and additional infrastructure investments. On the other hand, they tend to incur lower energy and maintenance costs and have a longer lifetime, particularly battery electric buses. All these advantages and disadvantages are included in the assessment of low-carbon bus options relative to diesel buses. For the trunk routes of the Amman BRT, the analysis shows that the opportunity charging bus can be the most appealing option, having a positive internal rate of return (IRR) for the incremental investment costs. -

West Midlands Low Emission Bus Delivery Plan
West Midlands Low Emission Bus Delivery Plan A study commissioned by Centro West Midlands ElementEnergy Ltd Logo use specification Use on A4 documentsLow EmissionUse onBus A3 documents On White 5mm Blue PantoneDelivery 289 Plan 100% 60% Exclusion 4mm zones should A study commissioned by Centro be 4mm top and bottom and 5mm each 4mm end 52mm LogotypeJuly 2016 74mm Logotype On dark blue or black 0% 30% June 2016 REPORT AUTHORS Celine Cluzel Alastair Hope-Morley Multi use throughout a document www.element-energy.co.uk www.networkwestmidlands.com 36mm Logotype Foreword West Midlands Low Emission Bus Delivery Plan Foreword We have ambitious plans in the West Midlands to transform our economy and improve the health and quality of life of people living and working here. There is however a growing recognition that to do this, urban air quality must be improved. Having a high quality, attractive bus network is integral to that but only by transforming our bus fleets and reducing emissions will the true potential of the bus be unleashed. The West Midlands Transport Emissions Framework, which was agreed by West Midlands ITA leaders in January 2016, signifies the increased importance of air quality in the transport agenda and the Low Emission Bus Delivery plan was a key part of this. The formation of the new West Midlands Combined Authority and the new Bus Alliance that brings together bus operators, local councils and other partners provides a unique opportunity to bring stakeholders together to deliver that transformation. The Bus Alliance has already identified reducing emissions and improving air quality as a key objective and this Low Emission Bus Delivery Plan sets out a framework for effectively driving that ambition forward. -
Zeeus Ebus Report #2 | Ebus Report Zeeus
ZeEUS in brief Scope Testing electrification solutions at the heart of the urban bus system network through live urban demonstrations and facilitating the market uptake of electric buses in Europe. Duration Nov 2013 – April 2018 [ 54 Months ] ZeEUS Budget 22.5m EUR [ 13.5 EU Funding ] Coordinator UITP, the International Association of Public Transport eBus Report #2 An updated overview of electric buses in Europe Partners An updated overview of electric buses in Europe electric of overview An updated | Stockholm Public Transport ZeEUS eBus Report #2 eBus Report ZeEUS www.zeeus.eu The ZeEUS project is coordinated by UITP. ZeEUS is co-funded by the European Commission under the 7th Research & Innovation Framework Programme, Mobility & Transport Directorate General under grant agreement n° 605485. The ZeEUS project has been launched by the European Commission in the frame of the European Green Vehicle and Smart Cities & Communities. ZeEUS eBus Report #2 An updated overview of electric buses in Europe FOREWORD TO ZEEUS REPORT 2017 Profound changes in how we enjoy mobility are under way. Traditional approaches are being trans- formed through shared mobility services and easier shifts between transport modes. Technology and societal needs continue to drive change. Digitalisation, automation and alternative energy sources are challenging traditional features and creating new opportunities linked with resource efficiency and the collaborative and circular economy. However, such changes can also be disruptive. While they create new jobs, they can also make others obsolete. They call for new skills, good working conditions and need anticipation, adaptation and investment. Transport needs to develop along a more sustainable path. -
Energiestrategie 2050 Im Öffentlichen Verkehr (Esöv2050)
Eidgenössisches Departement für Umwelt, Verkehr, Energie und Kommunikation (UVEK) Bundesamt für Verkehr BAV Programm Energiestrategie 2050 im öffentlichen Verkehr (ESöV2050) Energiestrategie 2050 im öffentlichen Verkehr Untersuchung des Potenzials alternativer Busantriebssysteme Schlussbericht Mathieu Horsky, Haute-Ecole ARC Rue de la Serre 7 / 2610 St-Imier, [email protected], www.he-arc.ch Thierry Robert-Nicoud, Haute-Ecole ARC Rue de la Serre 7 / 2610 St-Imier, [email protected], www.he-arc.ch Julie Barbey Horvath, Haute-Ecole d’Ingénierie et de Gestion, Kanton Waadt Route de Cheseaux 1/ 1401 Yverdon-les-Bains, [email protected], www.heig-vd.ch Yves Delacrétaz, Haute-Ecole d’Ingénierie et de Gestion, Kanton Waadt Route de Cheseaux 1 / 1401 Yverdon-les-Bains, [email protected], www.heig-vd.ch Luc Bossoney, Haute-Ecole d’Ingénierie et de Gestion, Kanton Waadt Route de Cheseaux 1 / 1401 Yverdon-les-Bains, [email protected], www.heig-vd.ch Begleitgruppe Tristan Chevroulet, Bundesamt für Verkehr (BAV) Daniel Schaller, Planair SA Stefan Schnell, Bundesamt für Verkehr (BAV) Walter Josi, Bundesamt für Verkehr (BAV) Interviewte Personen Thierry Wagenknecht, Transports Publics Genevois (TPG) Valérie Bourquard, Transports Publics de la Région Lausannoise (TL) Laurent Mudry, Transports Publics de la Région Lausannoise (TL) Eveline Wüest, PostAuto Urs Schläpfer, PostAuto Marcus Jung, Städtische Verkehrsbetriebe Bern (Bernmobil) Roman Zürcher, Regionalverkehr Bern‐Solothurn AG (RBS) Laura Andres, Freiburgische Verkehrsbetriebe (TPF) Marc Oggier, Basler Verkehrsbetriebe (BVB) Impressum Herausgeber: Bundesamt für Verkehr BAV Programm: Energiestrategie 2050 im öffentlichen Verkehr (ESöV 2050) CH‐3003 Bern Programmleitung Tristan Chevroulet, BAV Projektnummer: P‐113 Quelle: in Deutsch und in Französisch im Internet abrufbar unter der Adresse www.bav.admin.ch/energie2050 Für den Inhalt und die Schlussfolgerungen dieses Berichts ist/sind nur der Autor/die Autoren verantwortlich. -

Ventura County Electric Vehicle Ready Blueprint
Ventura County Electric Vehicle Ready Blueprint Prepared by: VCREA, Community Environmental Council, and EV Alliance Funded by the EV Ready Communities Challenge Grant from the California Energy Commission July 2019 Executive Summary and Document Guide The Ventura County Electric Vehicle Ready Blueprint is intended to accelerate and support electric vehicle and charging infrastructure deployment throughout Ventura County. Development of the Blueprint was funded by a competitive grant award from the California Energy Commission. The project team of Ventura County Regional Energy Alliance, Community Environmental Council, and EV Alliance has collaboratively developed the Blueprint framework to spur rapid adoption of electric vehicles in the region, in alignment with the State of California’s goal to deploy 5 million Zero Emission Vehicles by 2030. Electric vehicles are a truly transformative technology, as they emit zero tailpipe emissions, reduce greenhouse gas emissions by about 70 percent per mile compared to a gasoline vehicle (up to 100 percent for the many parts of Ventura County that utilize 100 percent clean energy), and achieve over 100 miles per gallon equivalent, allowing fueling costs as low as $1.50 per gallon equivalent. As transportation makes up about half of Ventura County’s greenhouse gas emissions, transitioning to zero emission vehicles is an urgent and critical element of local climate action. The vision for the Ventura County Blueprint is to develop replicable models for statewide transportation electrification that will make electric vehicles and other clean mobility options fully accessible to everyone in our communities. The Blueprint’s comprehensive recommendations are intended to help local policymakers and community and business stakeholders take bold action to further accelerate the adoption of electric vehicles and expand access to charging infrastructure. -
Zeeus Ebus Report an Overview of Electric Buses in Europe Foreword to Zeeus Report 2016
ZeEUS eBus Report An overview of electric buses in Europe FOREWORD TO ZEEUS REPORT 2016 ZeEUS is an impressive project with over 40 consortium participants and a budget in excess of 22 million euros of which the European Commission co-finances 13.5 million. Put simply, ZeEUS is the most important European project focusing on electric buses. In the light of the Paris Agreement reached at the COP 21 to limit global warming to 2 degrees Celsius, the transport sector has an important contribution to make to the achievement of the climate goals. Our common efforts to reduce greenhouse gas emissions are becoming even more of a priority as they are already. Transport contributes to about a quarter of total GHG emissions in the European Union. That is why the Energy Union strategy, adopted last year by the European Commission as one of the political priorities of President Juncker, includes as an objective the decarbonisation of transport. According to the Commission’s Communication “A European Strategy for Low-Emission Mobility”, by mid-century, GHG emissions from transport will need to be at least 60% lower than in 1990 and be firmly on the path towards zero concerning both GHG and pollutant emissions in order to meet the EU’s emissions targets. Alternative fuels are part of the policy mix to achieve this decarbonisation, and electrification of transport is a promising means to reach this goal. Alternative Fuels will help us meet our goals for reducing CO2, but also to diversify our energy sources and to improve air quality, two benefits we tend to overlook.