Creating Foldable Polyhedral Nets Using Evolution Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Sonobe Assembly Guide for a Few Polyhedra
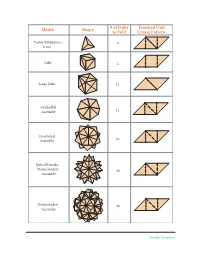
Model Shape # of Units Finished Unit to Fold Crease Pattern Toshie Takahama’s 3 Jewel Cube 6 Large Cube 12 Octahedral Assembly 12 Icosahedral Assembly 30 Spiked Pentakis Dodecahedral 60 Assembly Dodecahedral 90 Assembly 2 Sonobe Variations Sonobe Assembly Basics Sonobe assemblies are essentially “pyramidized” constructing a polyhedron, the key thing to re- polyhedra, each pyramid consisting of three So- member is that the diagonal ab of each Sonobe nobe units. The figure below shows a generic So- unit will lie along an edge of the polyhedron. nobe unit and how to form one pyramid. When a Pocket Tab Forming one Tab pyramid Pocket b A generic Sonobe unit representation Sonobe Assembly Guide for a Few Polyhedra 1. Toshie’s Jewel: Crease three finished units as tabs and pockets. This assembly is also sometimes explained in the table on page 2. Form a pyramid known as a Crane Egg. as above. Then turn the assembly upside down 2. Cube Assembly: Crease six finished units as and make another pyramid with the three loose explained in the table on page 2. Each face will be made up of 3 the center square of one unit and the tabs of two other units. 4 Do Steps 1 and 2 to form one face. Do Steps 3 and 4 to form one corner or vertex. Continue 1 2 interlocking in this manner to arrive at the finished cube. Sonobe Variations 3 3. Large Cube Assembly: Crease 12 finished units as explained on page 2. 5 6 3 The 12-unit large cube is the only assembly that does not involve pyramidizing. -

A Survey of Folding and Unfolding in Computational Geometry
Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 A Survey of Folding and Unfolding in Computational Geometry ERIK D. DEMAINE AND JOSEPH O’ROURKE Abstract. We survey results in a recent branch of computational geome- try: folding and unfolding of linkages, paper, and polyhedra. Contents 1. Introduction 168 2. Linkages 168 2.1. Definitions and fundamental questions 168 2.2. Fundamental questions in 2D 171 2.3. Fundamental questions in 3D 175 2.4. Fundamental questions in 4D and higher dimensions 181 2.5. Protein folding 181 3. Paper 183 3.1. Categorization 184 3.2. Origami design 185 3.3. Origami foldability 189 3.4. Flattening polyhedra 191 4. Polyhedra 193 4.1. Unfolding polyhedra 193 4.2. Folding polygons into convex polyhedra 196 4.3. Folding nets into nonconvex polyhedra 199 4.4. Continuously folding polyhedra 200 5. Conclusion and Higher Dimensions 201 Acknowledgements 202 References 202 Demaine was supported by NSF CAREER award CCF-0347776. O’Rourke was supported by NSF Distinguished Teaching Scholars award DUE-0123154. 167 168 ERIKD.DEMAINEANDJOSEPHO’ROURKE 1. Introduction Folding and unfolding problems have been implicit since Albrecht D¨urer [1525], but have not been studied extensively in the mathematical literature until re- cently. Over the past few years, there has been a surge of interest in these problems in discrete and computational geometry. This paper gives a brief sur- vey of most of the work in this area. Related, shorter surveys are [Connelly and Demaine 2004; Demaine 2001; Demaine and Demaine 2002; O’Rourke 2000]. We are currently preparing a monograph on the topic [Demaine and O’Rourke ≥ 2005]. -
![Arxiv:2105.14305V1 [Cs.CG] 29 May 2021](https://docslib.b-cdn.net/cover/2277/arxiv-2105-14305v1-cs-cg-29-may-2021-1052277.webp)
Arxiv:2105.14305V1 [Cs.CG] 29 May 2021
Efficient Folding Algorithms for Regular Polyhedra ∗ Tonan Kamata1 Akira Kadoguchi2 Takashi Horiyama3 Ryuhei Uehara1 1 School of Information Science, Japan Advanced Institute of Science and Technology (JAIST), Ishikawa, Japan fkamata,[email protected] 2 Intelligent Vision & Image Systems (IVIS), Tokyo, Japan [email protected] 3 Faculty of Information Science and Technology, Hokkaido University, Hokkaido, Japan [email protected] Abstract We investigate the folding problem that asks if a polygon P can be folded to a polyhedron Q for given P and Q. Recently, an efficient algorithm for this problem has been developed when Q is a box. We extend this idea to regular polyhedra, also known as Platonic solids. The basic idea of our algorithms is common, which is called stamping. However, the computational complexities of them are different depending on their geometric properties. We developed four algorithms for the problem as follows. (1) An algorithm for a regular tetrahedron, which can be extended to a tetramonohedron. (2) An algorithm for a regular hexahedron (or a cube), which is much efficient than the previously known one. (3) An algorithm for a general deltahedron, which contains the cases that Q is a regular octahedron or a regular icosahedron. (4) An algorithm for a regular dodecahedron. Combining these algorithms, we can conclude that the folding problem can be solved pseudo-polynomial time when Q is a regular polyhedron and other related solid. Keywords: Computational origami folding problem pseudo-polynomial time algorithm regular poly- hedron (Platonic solids) stamping 1 Introduction In 1525, the German painter Albrecht D¨urerpublished his masterwork on geometry [5], whose title translates as \On Teaching Measurement with a Compass and Straightedge for lines, planes, and whole bodies." In the book, he presented each polyhedron by drawing a net, which is an unfolding of the surface of the polyhedron to a planar layout without overlapping by cutting along its edges. -

Universal Folding Pathways of Polyhedron Nets
Universal folding pathways of polyhedron nets Paul M. Dodda, Pablo F. Damascenob, and Sharon C. Glotzera,b,c,d,1 aChemical Engineering Department, University of Michigan, Ann Arbor, MI 48109; bApplied Physics Program, University of Michigan, Ann Arbor, MI 48109; cDepartment of Materials Science and Engineering, University of Michigan, Ann Arbor, MI 48109; and dBiointerfaces Institute, University of Michigan, Ann Arbor, MI 48109 Contributed by Sharon C. Glotzer, June 6, 2018 (sent for review January 17, 2018; reviewed by Nuno Araujo and Andrew L. Ferguson) Low-dimensional objects such as molecular strands, ladders, and navigate, thermodynamically, from a denatured (unfolded) state sheets have intrinsic features that affect their propensity to fold to a natured (folded) one. Even after many decades of study, into 3D objects. Understanding this relationship remains a chal- however, a universal relationship between molecular sequence lenge for de novo design of functional structures. Using molecular and folded state—which could provide crucial insight into the dynamics simulations, we investigate the refolding of the 24 causes and potential treatments of many diseases—remains out possible 2D unfoldings (“nets”) of the three simplest Platonic of reach (11–13). shapes and demonstrate that attributes of a net’s topology— In this work, we study the thermodynamic foldability of 2D net compactness and leaves on the cutting graph—correlate nets for all five Platonic solids. Despite being the simplest and with thermodynamic folding propensity. To -

Marvelous Modular Origami
www.ATIBOOK.ir Marvelous Modular Origami www.ATIBOOK.ir Mukerji_book.indd 1 8/13/2010 4:44:46 PM Jasmine Dodecahedron 1 (top) and 3 (bottom). (See pages 50 and 54.) www.ATIBOOK.ir Mukerji_book.indd 2 8/13/2010 4:44:49 PM Marvelous Modular Origami Meenakshi Mukerji A K Peters, Ltd. Natick, Massachusetts www.ATIBOOK.ir Mukerji_book.indd 3 8/13/2010 4:44:49 PM Editorial, Sales, and Customer Service Office A K Peters, Ltd. 5 Commonwealth Road, Suite 2C Natick, MA 01760 www.akpeters.com Copyright © 2007 by A K Peters, Ltd. All rights reserved. No part of the material protected by this copyright notice may be reproduced or utilized in any form, electronic or mechanical, including photo- copying, recording, or by any information storage and retrieval system, without written permission from the copyright owner. Library of Congress Cataloging-in-Publication Data Mukerji, Meenakshi, 1962– Marvelous modular origami / Meenakshi Mukerji. p. cm. Includes bibliographical references. ISBN 978-1-56881-316-5 (alk. paper) 1. Origami. I. Title. TT870.M82 2007 736΄.982--dc22 2006052457 ISBN-10 1-56881-316-3 Cover Photographs Front cover: Poinsettia Floral Ball. Back cover: Poinsettia Floral Ball (top) and Cosmos Ball Variation (bottom). Printed in India 14 13 12 11 10 10 9 8 7 6 5 4 3 2 www.ATIBOOK.ir Mukerji_book.indd 4 8/13/2010 4:44:50 PM To all who inspired me and to my parents www.ATIBOOK.ir Mukerji_book.indd 5 8/13/2010 4:44:50 PM www.ATIBOOK.ir Contents Preface ix Acknowledgments x Photo Credits x Platonic & Archimedean Solids xi Origami Basics xii -

Extending Bricard Octahedra
Extending Bricard Octahedra Gerald D. Nelson [email protected] Abstract We demonstrate the construction of several families of flexible polyhedra by extending Bricard octahedra to form larger composite flexible polyhedra. These flexible polyhedra are of genus 0 and 1, have dihedral angles that are non-constant under flexion, exhibit self- intersections and are of indefinite size, the smallest of which is a decahedron with seven vertexes. 1. Introduction Flexible polyhedra can change in spatial shape while their edge lengths and face angles remain invariant. The first examples of such polyhedra were octahedra discovered by Bricard [1] in 1897. These polyhedra, commonly known as Bricard octahedra, are of three types, have triangular faces and six vertexes and have self-intersecting faces. Over the past century they have provided the basis for numerous investigations and many papers based in total or part on the subject have been published. An early paper published in 1912 by Bennett [2] investigated the kinematics of these octahedra and showed that a prismatic flexible polyhedra (polyhedra that have parallel edges and are quadrilateral in cross section) could be derived from Bricard octahedra of the first type. Lebesgue lectured on the subject in 1938 [3]. The relationship between flexible prismatic polyhedra and Bricard octahedra was described in more detail in 1943 by Goldberg [4]. The well known counter-example to the polyhedra rigidity conjecture [5] was constructed by Connelly in 1977 using elements of Bricard octahedra to provide flexibility. A 1990 study [6] by Bushmelev and Sabitov described the configuration space of octahedra in general and of Bricard octahedra specifically. -

Building Polyhedra by Self-Assembly
Building polyhedra by self-assembly Govind Menon Experiments Computations Shivendra Pandey Ryan Kaplan, Daniel Johnson David Gracias (lab) Brown University Johns Hopkins University NSF support: DMS 07-7482 (Career), EFRI-10-22638 and 10-22730(BECS). Main reference: Artificial Life, Vol. 20 (Fall 2014) Part 1. Biology, technology, and a little math... This talk is a description of a common mathematical framework to describe self-assembly of polyhedra. I will contrast two problems: The self-assembly of the bacteriophage MS2 (Reidun Twarock's team) Surface tension driven self-folding polyhedra (our work). Examples of icosahedral symmetry in nature C 60 molecule, 0.7 nm Adenovirus, 90 nm Radioalarian 10 µm Widely different self-assembly mechanisms at different scales. It is a very interesting to understand the types of symmetry, the “coding of symmetry” in the genome, and the interplay between symmetry and the pathways of self-assembly. Google Ngram Viewer Ngram Viewer Graph these case-sensitive comma-separated phrases: self assembly between 1900 and 2008 from the corpus English with smoothing of 5 . Search lots of books 0 Tweet 0 Search in Google Books: 1900 - 1974 1975 - 2001 2002 - 2003 2004 - 2005 2006 - 2008 self assembly (English) Run your own experiment! Raw data is available for download here. © 2010 Google - About Google - About Google Books - About Google Books NGram Viewer 1 of 1 One of the first uses of the phrase “self assembly” is by Caspar and Klug in their work on the structure of viruses. They distinguish grades of organization in a cell as sub-assembly and self-assembly and write: Self-assembly (of a virus) is a process akin to crystallization and is governed by the laws of statistical mechanics. -

A Pseudopolynomial Algorithm for Alexandrov's Theorem
A pseudopolynomial algorithm for Alexandrov's theorem The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Kane, Daniel, Gregory N. Price and Erik D. Demaine, "A Pseudopolynomial Algorithm for Alexandrov’s Theorem" Algorithms and data structures (Lecture notes in computer science, v. 5664,2009)435-446. Copyright © 2009, Springer . As Published http://dx.doi.org/10.1007/978-3-642-03367-4_38 Publisher Springer Version Author's final manuscript Citable link http://hdl.handle.net/1721.1/61985 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike 3.0 Detailed Terms http://creativecommons.org/licenses/by-nc-sa/3.0/ A Pseudopolynomial Algorithm for Alexandrov’s Theorem Daniel Kane1?, Gregory N. Price2??, and Erik D. Demaine3??? 1 Department of Mathematics, Harvard University, 1 Oxford Street, Cambridge MA 02139, USA, [email protected] 2 MIT Computer Science and Artificial Intelligence Laboratory, 32 Vassar Street, Cambridge, MA 02139, USA, {price,edemaine}@mit.edu Abstract. Alexandrov’s Theorem states that every metric with the global topology and local geometry required of a convex polyhedron is in fact the intrinsic metric of some convex polyhedron. Recent work by Bobenko and Izmestiev describes a differential equation whose solution is the polyhedron corresponding to a given metric. We describe an al- gorithm based on this differential equation to compute the polyhedron to arbitrary precision given the metric, and prove a pseudopolynomial bound on its running time. 1 Introduction Consider the intrinsic metric induced on the surface M of a convex body in R3. Clearly M under this metric is homeomorphic to a sphere, and locally convex in the sense that a circle of radius r has circumference at most 2πr. -

Prescribing the Gauss Curvature of Convex Bodies in Hyperbolic Space
PRESCRIBING THE GAUSS CURVATURE OF CONVEX BODIES IN HYPERBOLIC SPACE JER´ OME^ BERTRAND AND PHILIPPE CASTILLON Abstract. The Gauss curvature measure of a pointed Euclidean convex body is a measure on the unit sphere which extends the notion of Gauss curvature to non-smooth bodies. Alexandrov's problem consists in finding a convex body with given curvature measure. In Euclidean space, A.D. Alexandrov gave a necessary and sufficient condition on the measure for this problem to have a solution. In this paper, we address Alexandrov's problem for convex bodies in the m+1 hyperbolic space H . After defining the Gauss curvature measure of an arbitrary hyperbolic convex body, we completely solve Alexandrov's problem in this setting. Contrary to the Euclidean case, we also prove the uniqueness of such a convex body. The methods for proving existence and uniqueness of the solution to this problem are both new. Contents Introduction1 1. The geometry of convex sets in the hyperbolic and de Sitter spaces4 1.1. The geometric framework4 m+1 m+1 1.2. Convex bodies in H and dS+ 6 1.3. Duality and convex bodies9 2. The curvature measure 10 2.1. Definition of the curvature measure 10 2.2. Properties of the curvature measure 14 2.3. Uniqueness of the convex body with prescribed curvature 17 3. The prescription of curvature as an optimization problem 18 3.1. From convex bodies to c-conjugate pairs 18 3.2. A nonlinear Kantorovich problem 19 3.3. Alexandrov meets Kantorovich 20 4. Solving the optimization problem 22 4.1. -

Some Polycubes Have No Edge Zipper Unfolding∗
Some Polycubes Have No Edge Zipper Unfolding∗ Erik D. Demainey Martin L. Demaine∗ David Eppsteinz Joseph O'Rourkex July 24, 2020 Abstract It is unknown whether every polycube (polyhedron constructed by gluing cubes face-to-face) has an edge unfolding, that is, cuts along edges of the cubes that unfolds the polycube to a single nonoverlapping polygon in the plane. Here we construct polycubes that have no edge zipper unfolding where the cut edges are further restricted to form a path. 1 Introduction A polycube P is an object constructed by gluing cubes whole-face to whole- face, such that its surface is a manifold. Thus the neighborhood of every surface point is a disk; so there are no edge-edge nor vertex-vertex nonmanifold surface touchings. Here we only consider polycubes of genus zero. The edges of a polycube are all the cube edges on the surface, even when those edges are shared between two coplanar faces. Similarly, the vertices of a polycube are all the cube vertices on the surface, even when those vertices are flat, incident to 360◦ total face angle. Such polycube flat vertices have degree 4. It will be useful to distinguish these flat vertices from corner vertices, nonflat vertices with total incident angle 6= 360◦ (degree 3, 5, or 6). For a polycube P , let its 1-skeleton graph GP include every vertex and edge of P , with vertices marked as either corner or flat. It is an open problem to determine whether every polycube has an edge arXiv:1907.08433v3 [cs.CG] 22 Jul 2020 unfolding (also called a grid unfolding) | a tree in the 1-skeleton that spans all corner vertices (but need not include flat vertices) which, when cut, unfolds the surface to a net, a planar nonoverlapping polygon [O'R19]. -

Flat-Foldability of Origami Crease Patterns
Flat-Foldability of Origami Crease Patterns Jonathan Schneider December 10, 2004 1 FLAT ORIGAMI. Origami has traditionally been appreciated as an art form and a recreation. Increasingly over the course of the 20th century, however, attention has been drawn to the scientific and mathematical properties of paperfolding, with the majority of this work occurring in the past 20 years or so. Even today, many of the most basic and intuitive problems raised by origami still lack definitive solutions. Origami is unlike most forms of sculpture in that its medium—a sheet of paper, usually square in shape—undergoes almost no physical change during the creation process. The paper is never cut nor chemically manipulated; its size, shape, and flatness are never altered; nothing is ever added or taken away. Only its position in space is affected. Origami has been described as an “art of constraints.” The art lies in exploring and expanding the realm of what can be achieved within the constraints naturally imposed by the paper. Designing an origami model of a particular subject requires considerable ingenuity. Many origami models are so cleverly designed that their final forms bear almost no resem- blance to the sheets of paper from which they are made. However, there exists a substantial class of origami forms which share one basic characteristic of the original paper: flatness. Flat models like the crane (fig. 1) can be pressed between the pages of a book. A math- ematical inquiry into paperfolding could logically start by examining the rules that govern flat-folding. The added constraint of flatness actually simplifies our mathematical description of folding by reducing the number of relevant spatial dimensions to two. -

Lesson 14: Nets and Surface Area
GRADE 6 MATHEMATICS Lesson 14: Nets and Surface Area Let’s use nets to find the surface area of polyhedra. 14.1: Matching Nets Each of the following nets can be assembled into a polyhedron. Match each net with its corresponding polyhedron, and name the polyhedron. Be prepared to explain how you know the net and polyhedron go together. 14.2: Using Nets to Find Surface Area Your teacher will give you the nets of three polyhedra to cut out and assemble. 1. Name the polyhedron that each net would form when assembled. A: B: C: 2. Cut out your nets and use them to create three-dimensional shapes. 3. Find the surface area of each polyhedron. Explain your reasoning clearly (Download for free at openupresources.org) 99 Unit 1: Area and Surface Area Lesson 14: Nets and Surface Area Open Up Resources GRADE 6 MATHEMATICS Are you ready for more? 1. For each of these nets, decide if it can be assembled into a rectangular prism. 2. For each of these nets, decide if it can be folded into a triangular prism. (Download for free at openupresources.org) 100 Unit 1: Area and Surface Area Lesson 14: Nets and Surface Area Open Up Resources GRADE 6 MATHEMATICS Lesson 14 Summary A net of a pyramid has one polygon that is the base. The rest of the polygons are triangles. A pentagonal pyramid and its net are shown here. A net of a prism has two copies of the polygon that is the base. The rest of the polygons are rectangles.