A Study of the Rigidity of Regular Polytopes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry of Generalized Permutohedra
Geometry of Generalized Permutohedra by Jeffrey Samuel Doker A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Mathematics in the Graduate Division of the University of California, Berkeley Committee in charge: Federico Ardila, Co-chair Lior Pachter, Co-chair Matthias Beck Bernd Sturmfels Lauren Williams Satish Rao Fall 2011 Geometry of Generalized Permutohedra Copyright 2011 by Jeffrey Samuel Doker 1 Abstract Geometry of Generalized Permutohedra by Jeffrey Samuel Doker Doctor of Philosophy in Mathematics University of California, Berkeley Federico Ardila and Lior Pachter, Co-chairs We study generalized permutohedra and some of the geometric properties they exhibit. We decompose matroid polytopes (and several related polytopes) into signed Minkowski sums of simplices and compute their volumes. We define the associahedron and multiplihe- dron in terms of trees and show them to be generalized permutohedra. We also generalize the multiplihedron to a broader class of generalized permutohedra, and describe their face lattices, vertices, and volumes. A family of interesting polynomials that we call composition polynomials arises from the study of multiplihedra, and we analyze several of their surprising properties. Finally, we look at generalized permutohedra of different root systems and study the Minkowski sums of faces of the crosspolytope. i To Joe and Sue ii Contents List of Figures iii 1 Introduction 1 2 Matroid polytopes and their volumes 3 2.1 Introduction . .3 2.2 Matroid polytopes are generalized permutohedra . .4 2.3 The volume of a matroid polytope . .8 2.4 Independent set polytopes . 11 2.5 Truncation flag matroids . 14 3 Geometry and generalizations of multiplihedra 18 3.1 Introduction . -

Two Poset Polytopes
Discrete Comput Geom 1:9-23 (1986) G eometrv)i.~.reh, ~ ( :*mllmlati~ml © l~fi $1~ter-Vtrlq New Yorklu¢. t¢ Two Poset Polytopes Richard P. Stanley* Department of Mathematics, Massachusetts Institute of Technology, Cambridge, MA 02139 Abstract. Two convex polytopes, called the order polytope d)(P) and chain polytope <~(P), are associated with a finite poset P. There is a close interplay between the combinatorial structure of P and the geometric structure of E~(P). For instance, the order polynomial fl(P, m) of P and Ehrhart poly- nomial i(~9(P),m) of O(P) are related by f~(P,m+l)=i(d)(P),m). A "transfer map" then allows us to transfer properties of O(P) to W(P). In particular, we transfer known inequalities involving linear extensions of P to some new inequalities. I. The Order Polytope Our aim is to investigate two convex polytopes associated with a finite partially ordered set (poset) P. The first of these, which we call the "order polytope" and denote by O(P), has been the subject of considerable scrutiny, both explicit and implicit, Much of what we say about the order polytope will be essentially a review of well-known results, albeit ones scattered throughout the literature, sometimes in a rather obscure form. The second polytope, called the "chain polytope" and denoted if(P), seems never to have been previously considered per se. It is a special case of the vertex-packing polytope of a graph (see Section 2) but has many special properties not in general valid or meaningful for graphs. -

Abstract Regular Polytopes
ENCYCLOPEDIA OF MATHEMATICS AND ITS APPLICATIONS Abstract Regular Polytopes PETER MMULLEN University College London EGON SCHULTE Northeastern University PUBLISHED BY THE PRESS SYNDICATE OF THE UNIVERSITY OF CAMBRIDGE The Pitt Building, Trumpington Street, Cambridge, United Kingdom CAMBRIDGE UNIVERSITY PRESS The Edinburgh Building, Cambridge CB2 2RU, UK 40 West 20th Street, New York, NY 10011-4211, USA 477 Williamstown Road, Port Melbourne, VIC 3207, Australia Ruiz de Alarc´on 13, 28014 Madrid, Spain Dock House, The Waterfront, Cape Town 8001, South Africa http://www.cambridge.org c Peter McMullen and Egon Schulte 2002 This book is in copyright. Subject to statutory exception and to the provisions of relevant collective licensing agreements, no reproduction of any part may take place without the written permission of Cambridge University Press. First published 2002 Printed in the United States of America Typeface Times New Roman 10/12.5 pt. System LATEX2ε [] A catalog record for this book is available from the British Library. Library of Congress Cataloging in Publication Data McMullen, Peter, 1955– Abstract regular polytopes / Peter McMullen, Egon Schulte. p. cm. – (Encyclopedia of mathematics and its applications) Includes bibliographical references and index. ISBN 0-521-81496-0 1. Polytopes. I. Schulte, Egon, 1955– II. Title. III. Series. QA691 .M395 2002 516.35 – dc21 2002017391 ISBN 0 521 81496 0 hardback Contents Preface page xiii 1 Classical Regular Polytopes 1 1A The Historical Background 1 1B Regular Convex Polytopes 7 1C Extensions -

1 Lifts of Polytopes
Lecture 5: Lifts of polytopes and non-negative rank CSE 599S: Entropy optimality, Winter 2016 Instructor: James R. Lee Last updated: January 24, 2016 1 Lifts of polytopes 1.1 Polytopes and inequalities Recall that the convex hull of a subset X n is defined by ⊆ conv X λx + 1 λ x0 : x; x0 X; λ 0; 1 : ( ) f ( − ) 2 2 [ ]g A d-dimensional convex polytope P d is the convex hull of a finite set of points in d: ⊆ P conv x1;:::; xk (f g) d for some x1;:::; xk . 2 Every polytope has a dual representation: It is a closed and bounded set defined by a family of linear inequalities P x d : Ax 6 b f 2 g for some matrix A m d. 2 × Let us define a measure of complexity for P: Define γ P to be the smallest number m such that for some C s d ; y s ; A m d ; b m, we have ( ) 2 × 2 2 × 2 P x d : Cx y and Ax 6 b : f 2 g In other words, this is the minimum number of inequalities needed to describe P. If P is full- dimensional, then this is precisely the number of facets of P (a facet is a maximal proper face of P). Thinking of γ P as a measure of complexity makes sense from the point of view of optimization: Interior point( methods) can efficiently optimize linear functions over P (to arbitrary accuracy) in time that is polynomial in γ P . ( ) 1.2 Lifts of polytopes Many simple polytopes require a large number of inequalities to describe. -

Regular Polyhedra of Index 2
REGULAR POLYHEDRA OF INDEX 2 A dissertation presented by Anthony Cutler to The Department of Mathematics In partial fulfillment of the requirements for the degree of Doctor of Philosophy in the field of Mathematics Northeastern University Boston, Massachusetts April, 2009 1 REGULAR POLYHEDRA OF INDEX 2 by Anthony Cutler ABSTRACT OF DISSERTATION Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Mathematics in the Graduate School of Arts and Sciences of Northeastern University, April 2009 2 We classify all finite regular polyhedra of index 2, as defined in Section 2 herein. The definition requires the polyhedra to be combinatorially flag transitive, but does not require them to have planar or convex faces or vertex-figures, and neither does it require the polyhedra to be orientable. We find there are 10 combinatorially regular polyhedra of index 2 with vertices on one orbit, and 22 infinite families of combinatorially regular polyhedra of index 2 with vertices on two orbits, where polyhedra in the same family differ only in the relative diameters of their vertex orbits. For each such polyhedron, or family of polyhedra, we provide the underlying map, as well as a geometric diagram showing a representative face for each face orbit, and a verification of the polyhedron’s combinatorial regularity. A self-contained completeness proof is given. Exactly five of the polyhedra have planar faces, which is consistent with a previously known result. We conclude by describing a non-Petrie duality relation among regular polyhedra of index 2, and suggest how it can be extended to other combinatorially regular polyhedra. -
![Arxiv:Math/9906062V1 [Math.MG] 10 Jun 1999 Udo Udmna Eerh(Rn 96-01-00166)](https://docslib.b-cdn.net/cover/3717/arxiv-math-9906062v1-math-mg-10-jun-1999-udo-udmna-eerh-rn-96-01-00166-483717.webp)
Arxiv:Math/9906062V1 [Math.MG] 10 Jun 1999 Udo Udmna Eerh(Rn 96-01-00166)
Embedding the graphs of regular tilings and star-honeycombs into the graphs of hypercubes and cubic lattices ∗ Michel DEZA CNRS and Ecole Normale Sup´erieure, Paris, France Mikhail SHTOGRIN Steklov Mathematical Institute, 117966 Moscow GSP-1, Russia Abstract We review the regular tilings of d-sphere, Euclidean d-space, hyperbolic d-space and Coxeter’s regular hyperbolic honeycombs (with infinite or star-shaped cells or vertex figures) with respect of possible embedding, isometric up to a scale, of their skeletons into a m-cube or m-dimensional cubic lattice. In section 2 the last remaining 2-dimensional case is decided: for any odd m ≥ 7, star-honeycombs m m {m, 2 } are embeddable while { 2 ,m} are not (unique case of non-embedding for dimension 2). As a spherical analogue of those honeycombs, we enumerate, in section 3, 36 Riemann surfaces representing all nine regular polyhedra on the sphere. In section 4, non-embeddability of all remaining star-honeycombs (on 3-sphere and hyperbolic 4-space) is proved. In the last section 5, all cases of embedding for dimension d> 2 are identified. Besides hyper-simplices and hyper-octahedra, they are exactly those with bipartite skeleton: hyper-cubes, cubic lattices and 8, 2, 1 tilings of hyperbolic 3-, 4-, 5-space (only two, {4, 3, 5} and {4, 3, 3, 5}, of those 11 have compact both, facets and vertex figures). 1 Introduction arXiv:math/9906062v1 [math.MG] 10 Jun 1999 We say that given tiling (or honeycomb) T has a l1-graph and embeds up to scale λ into m-cube Hm (or, if the graph is infinite, into cubic lattice Zm ), if there exists a mapping f of the vertex-set of the skeleton graph of T into the vertex-set of Hm (or Zm) such that λdT (vi, vj)= ||f(vi), f(vj)||l1 = X |fk(vi) − fk(vj)| for all vertices vi, vj, 1≤k≤m ∗This work was supported by the Volkswagen-Stiftung (RiP-program at Oberwolfach) and Russian fund of fundamental research (grant 96-01-00166). -

Binary Icosahedral Group and 600-Cell
Article Binary Icosahedral Group and 600-Cell Jihyun Choi and Jae-Hyouk Lee * Department of Mathematics, Ewha Womans University 52, Ewhayeodae-gil, Seodaemun-gu, Seoul 03760, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-2-3277-3346 Received: 10 July 2018; Accepted: 26 July 2018; Published: 7 August 2018 Abstract: In this article, we have an explicit description of the binary isosahedral group as a 600-cell. We introduce a method to construct binary polyhedral groups as a subset of quaternions H via spin map of SO(3). In addition, we show that the binary icosahedral group in H is the set of vertices of a 600-cell by applying the Coxeter–Dynkin diagram of H4. Keywords: binary polyhedral group; icosahedron; dodecahedron; 600-cell MSC: 52B10, 52B11, 52B15 1. Introduction The classification of finite subgroups in SLn(C) derives attention from various research areas in mathematics. Especially when n = 2, it is related to McKay correspondence and ADE singularity theory [1]. The list of finite subgroups of SL2(C) consists of cyclic groups (Zn), binary dihedral groups corresponded to the symmetry group of regular 2n-gons, and binary polyhedral groups related to regular polyhedra. These are related to the classification of regular polyhedrons known as Platonic solids. There are five platonic solids (tetrahedron, cubic, octahedron, dodecahedron, icosahedron), but, as a regular polyhedron and its dual polyhedron are associated with the same symmetry groups, there are only three binary polyhedral groups(binary tetrahedral group 2T, binary octahedral group 2O, binary icosahedral group 2I) related to regular polyhedrons. -
Sonobe Assembly Guide for a Few Polyhedra
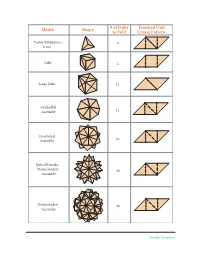
Model Shape # of Units Finished Unit to Fold Crease Pattern Toshie Takahama’s 3 Jewel Cube 6 Large Cube 12 Octahedral Assembly 12 Icosahedral Assembly 30 Spiked Pentakis Dodecahedral 60 Assembly Dodecahedral 90 Assembly 2 Sonobe Variations Sonobe Assembly Basics Sonobe assemblies are essentially “pyramidized” constructing a polyhedron, the key thing to re- polyhedra, each pyramid consisting of three So- member is that the diagonal ab of each Sonobe nobe units. The figure below shows a generic So- unit will lie along an edge of the polyhedron. nobe unit and how to form one pyramid. When a Pocket Tab Forming one Tab pyramid Pocket b A generic Sonobe unit representation Sonobe Assembly Guide for a Few Polyhedra 1. Toshie’s Jewel: Crease three finished units as tabs and pockets. This assembly is also sometimes explained in the table on page 2. Form a pyramid known as a Crane Egg. as above. Then turn the assembly upside down 2. Cube Assembly: Crease six finished units as and make another pyramid with the three loose explained in the table on page 2. Each face will be made up of 3 the center square of one unit and the tabs of two other units. 4 Do Steps 1 and 2 to form one face. Do Steps 3 and 4 to form one corner or vertex. Continue 1 2 interlocking in this manner to arrive at the finished cube. Sonobe Variations 3 3. Large Cube Assembly: Crease 12 finished units as explained on page 2. 5 6 3 The 12-unit large cube is the only assembly that does not involve pyramidizing. -

A Tourist Guide to the RCSR
A tourist guide to the RCSR Some of the sights, curiosities, and little-visited by-ways Michael O'Keeffe, Arizona State University RCSR is a Reticular Chemistry Structure Resource available at http://rcsr.net. It is open every day of the year, 24 hours a day, and admission is free. It consists of data for polyhedra and 2-periodic and 3-periodic structures (nets). Visitors unfamiliar with the resource are urged to read the "about" link first. This guide assumes you have. The guide is designed to draw attention to some of the attractions therein. If they sound particularly attractive please visit them. It can be a nice way to spend a rainy Sunday afternoon. OKH refers to M. O'Keeffe & B. G. Hyde. Crystal Structures I: Patterns and Symmetry. Mineral. Soc. Am. 1966. This is out of print but due as a Dover reprint 2019. POLYHEDRA Read the "about" for hints on how to use the polyhedron data to make accurate drawings of polyhedra using crystal drawing programs such as CrystalMaker (see "links" for that program). Note that they are Cartesian coordinates for (roughly) equal edge. To make the drawing with unit edge set the unit cell edges to all 10 and divide the coordinates given by 10. There seems to be no generally-agreed best embedding for complex polyhedra. It is generally not possible to have equal edge, vertices on a sphere and planar faces. Keywords used in the search include: Simple. Each vertex is trivalent (three edges meet at each vertex) Simplicial. Each face is a triangle. -

Petrie Schemes
Canad. J. Math. Vol. 57 (4), 2005 pp. 844–870 Petrie Schemes Gordon Williams Abstract. Petrie polygons, especially as they arise in the study of regular polytopes and Coxeter groups, have been studied by geometers and group theorists since the early part of the twentieth century. An open question is the determination of which polyhedra possess Petrie polygons that are simple closed curves. The current work explores combinatorial structures in abstract polytopes, called Petrie schemes, that generalize the notion of a Petrie polygon. It is established that all of the regular convex polytopes and honeycombs in Euclidean spaces, as well as all of the Grunbaum–Dress¨ polyhedra, pos- sess Petrie schemes that are not self-intersecting and thus have Petrie polygons that are simple closed curves. Partial results are obtained for several other classes of less symmetric polytopes. 1 Introduction Historically, polyhedra have been conceived of either as closed surfaces (usually topo- logical spheres) made up of planar polygons joined edge to edge or as solids enclosed by such a surface. In recent times, mathematicians have considered polyhedra to be convex polytopes, simplicial spheres, or combinatorial structures such as abstract polytopes or incidence complexes. A Petrie polygon of a polyhedron is a sequence of edges of the polyhedron where any two consecutive elements of the sequence have a vertex and face in common, but no three consecutive edges share a commonface. For the regular polyhedra, the Petrie polygons form the equatorial skew polygons. Petrie polygons may be defined analogously for polytopes as well. Petrie polygons have been very useful in the study of polyhedra and polytopes, especially regular polytopes. -

Four-Dimensional Regular Polytopes
faculty of science mathematics and applied and engineering mathematics Four-dimensional regular polytopes Bachelor’s Project Mathematics November 2020 Student: S.H.E. Kamps First supervisor: Prof.dr. J. Top Second assessor: P. Kiliçer, PhD Abstract Since Ancient times, Mathematicians have been interested in the study of convex, regular poly- hedra and their beautiful symmetries. These five polyhedra are also known as the Platonic Solids. In the 19th century, the four-dimensional analogues of the Platonic solids were described mathe- matically, adding one regular polytope to the collection with no analogue regular polyhedron. This thesis describes the six convex, regular polytopes in four-dimensional Euclidean space. The focus lies on deriving information about their cells, faces, edges and vertices. Besides that, the symmetry groups of the polytopes are touched upon. To better understand the notions of regularity and sym- metry in four dimensions, our journey begins in three-dimensional space. In this light, the thesis also works out the details of a proof of prof. dr. J. Top, showing there exist exactly five convex, regular polyhedra in three-dimensional space. Keywords: Regular convex 4-polytopes, Platonic solids, symmetry groups Acknowledgements I would like to thank prof. dr. J. Top for supervising this thesis online and adapting to the cir- cumstances of Covid-19. I also want to thank him for his patience, and all his useful comments in and outside my LATEX-file. Also many thanks to my second supervisor, dr. P. Kılıçer. Furthermore, I would like to thank Jeanne for all her hospitality and kindness to welcome me in her home during the process of writing this thesis. -

Regular Polyhedra Through Time
Fields Institute I. Hubard Polytopes, Maps and their Symmetries September 2011 Regular polyhedra through time The greeks were the first to study the symmetries of polyhedra. Euclid, in his Elements showed that there are only five regular solids (that can be seen in Figure 1). In this context, a polyhe- dron is regular if all its polygons are regular and equal, and you can find the same number of them at each vertex. Figure 1: Platonic Solids. It is until 1619 that Kepler finds other two regular polyhedra: the great dodecahedron and the great icosahedron (on Figure 2. To do so, he allows \false" vertices and intersection of the (convex) faces of the polyhedra at points that are not vertices of the polyhedron, just as the I. Hubard Polytopes, Maps and their Symmetries Page 1 Figure 2: Kepler polyhedra. 1619. pentagram allows intersection of edges at points that are not vertices of the polygon. In this way, the vertex-figure of these two polyhedra are pentagrams (see Figure 3). Figure 3: A regular convex pentagon and a pentagram, also regular! In 1809 Poinsot re-discover Kepler's polyhedra, and discovers its duals: the small stellated dodecahedron and the great stellated dodecahedron (that are shown in Figure 4). The faces of such duals are pentagrams, and are organized on a \convex" way around each vertex. Figure 4: The other two Kepler-Poinsot polyhedra. 1809. A couple of years later Cauchy showed that these are the only four regular \star" polyhedra. We note that the convex hull of the great dodecahedron, great icosahedron and small stellated dodecahedron is the icosahedron, while the convex hull of the great stellated dodecahedron is the dodecahedron.