Triplicated Instruction Set Randomization in Parallel
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

How Data Hazards Can Be Removed Effectively
International Journal of Scientific & Engineering Research, Volume 7, Issue 9, September-2016 116 ISSN 2229-5518 How Data Hazards can be removed effectively Muhammad Zeeshan, Saadia Anayat, Rabia and Nabila Rehman Abstract—For fast Processing of instructions in computer architecture, the most frequently used technique is Pipelining technique, the Pipelining is consider an important implementation technique used in computer hardware for multi-processing of instructions. Although multiple instructions can be executed at the same time with the help of pipelining, but sometimes multi-processing create a critical situation that altered the normal CPU executions in expected way, sometime it may cause processing delay and produce incorrect computational results than expected. This situation is known as hazard. Pipelining processing increase the processing speed of the CPU but these Hazards that accrue due to multi-processing may sometime decrease the CPU processing. Hazards can be needed to handle properly at the beginning otherwise it causes serious damage to pipelining processing or overall performance of computation can be effected. Data hazard is one from three types of pipeline hazards. It may result in Race condition if we ignore a data hazard, so it is essential to resolve data hazards properly. In this paper, we tries to present some ideas to deal with data hazards are presented i.e. introduce idea how data hazards are harmful for processing and what is the cause of data hazards, why data hazard accord, how we remove data hazards effectively. While pipelining is very useful but there are several complications and serious issue that may occurred related to pipelining i.e. -

Lecture Notes in Assembly Language
Lecture Notes in Assembly Language Short introduction to low-level programming Piotr Fulmański Łódź, 12 czerwca 2015 Spis treści Spis treści iii 1 Before we begin1 1.1 Simple assembler.................................... 1 1.1.1 Excercise 1 ................................... 2 1.1.2 Excercise 2 ................................... 3 1.1.3 Excercise 3 ................................... 3 1.1.4 Excercise 4 ................................... 5 1.1.5 Excercise 5 ................................... 6 1.2 Improvements, part I: addressing........................... 8 1.2.1 Excercise 6 ................................... 11 1.3 Improvements, part II: indirect addressing...................... 11 1.4 Improvements, part III: labels............................. 18 1.4.1 Excercise 7: find substring in a string .................... 19 1.4.2 Excercise 8: improved polynomial....................... 21 1.5 Improvements, part IV: flag register ......................... 23 1.6 Improvements, part V: the stack ........................... 24 1.6.1 Excercise 12................................... 26 1.7 Improvements, part VI – function stack frame.................... 29 1.8 Finall excercises..................................... 34 1.8.1 Excercise 13................................... 34 1.8.2 Excercise 14................................... 34 1.8.3 Excercise 15................................... 34 1.8.4 Excercise 16................................... 34 iii iv SPIS TREŚCI 1.8.5 Excercise 17................................... 34 2 First program 37 2.1 Compiling, -

A Superscalar Out-Of-Order X86 Soft Processor for FPGA
A Superscalar Out-of-Order x86 Soft Processor for FPGA Henry Wong University of Toronto, Intel [email protected] June 5, 2019 Stanford University EE380 1 Hi! ● CPU architect, Intel Hillsboro ● Ph.D., University of Toronto ● Today: x86 OoO processor for FPGA (Ph.D. work) – Motivation – High-level design and results – Microarchitecture details and some circuits 2 FPGA: Field-Programmable Gate Array ● Is a digital circuit (logic gates and wires) ● Is field-programmable (at power-on, not in the fab) ● Pre-fab everything you’ll ever need – 20x area, 20x delay cost – Circuit building blocks are somewhat bigger than logic gates 6-LUT6-LUT 6-LUT6-LUT 3 6-LUT 6-LUT FPGA: Field-Programmable Gate Array ● Is a digital circuit (logic gates and wires) ● Is field-programmable (at power-on, not in the fab) ● Pre-fab everything you’ll ever need – 20x area, 20x delay cost – Circuit building blocks are somewhat bigger than logic gates 6-LUT 6-LUT 6-LUT 6-LUT 4 6-LUT 6-LUT FPGA Soft Processors ● FPGA systems often have software components – Often running on a soft processor ● Need more performance? – Parallel code and hardware accelerators need effort – Less effort if soft processors got faster 5 FPGA Soft Processors ● FPGA systems often have software components – Often running on a soft processor ● Need more performance? – Parallel code and hardware accelerators need effort – Less effort if soft processors got faster 6 FPGA Soft Processors ● FPGA systems often have software components – Often running on a soft processor ● Need more performance? – Parallel -
Flynn's Taxonomy
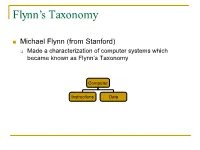
Flynn’s Taxonomy n Michael Flynn (from Stanford) q Made a characterization of computer systems which became known as Flynn’s Taxonomy Computer Instructions Data SISD – Single Instruction Single Data Systems SI SISD SD SIMD – Single Instruction Multiple Data Systems “Vector Processors” SIMD SD SI SIMD SD Multiple Data SIMD SD MIMD Multiple Instructions Multiple Data Systems “Multi Processors” Multiple Instructions Multiple Data SI SIMD SD SI SIMD SD SI SIMD SD MISD – Multiple Instructions / Single Data Systems n Some people say “pipelining” lies here, but this is debatable Single Data Multiple Instructions SIMD SI SD SIMD SI SIMD SI Abbreviations •PC – Program Counter •MAR – Memory Access Register •M – Memory •MDR – Memory Data Register •A – Accumulator •ALU – Arithmetic Logic Unit •IR – Instruction Register •OP – Opcode •ADDR – Address •CLU – Control Logic Unit LOAD X n MAR <- PC n MDR <- M[ MAR ] n IR <- MDR n MAR <- IR[ ADDR ] n DECODER <- IR[ OP ] n MDR <- M[ MAR ] n A <- MDR ADD n MAR <- PC n MDR <- M[ MAR ] n IR <- MDR n MAR <- IR[ ADDR ] n DECODER <- IR[ OP ] n MDR <- M[ MAR ] n A <- A+MDR STORE n MDR <- A n M[ MAR ] <- MDR SISD Stack Machine •Stack Trace •Push 1 1 _ •Push 2 2 1 •Add 2 3 •Pop _ 3 •Pop C _ _ •First Stack Machine •B5000 Array Processor Array Processors n One of the first Array Processors was the ILLIIAC IV n Load A1, V[1] n Load B1, Y[1] n Load A2, V[2] n Load B2, Y[2] n Load A3, V[3] n Load B3, Y[3] n ADDALL n Store C1, W[1] n Store C2, W[2] n Store C3, W[3] Memory Interleaving Definition: Memory interleaving is a design used to gain faster access to memory, by organizing memory into separate memories, each with their own MAR (memory address register). -

Computer Organization & Architecture Eie
COMPUTER ORGANIZATION & ARCHITECTURE EIE 411 Course Lecturer: Engr Banji Adedayo. Reg COREN. The characteristics of different computers vary considerably from category to category. Computers for data processing activities have different features than those with scientific features. Even computers configured within the same application area have variations in design. Computer architecture is the science of integrating those components to achieve a level of functionality and performance. It is logical organization or designs of the hardware that make up the computer system. The internal organization of a digital system is defined by the sequence of micro operations it performs on the data stored in its registers. The internal structure of a MICRO-PROCESSOR is called its architecture and includes the number lay out and functionality of registers, memory cell, decoders, controllers and clocks. HISTORY OF COMPUTER HARDWARE The first use of the word ‘Computer’ was recorded in 1613, referring to a person who carried out calculation or computation. A brief History: Computer as we all know 2day had its beginning with 19th century English Mathematics Professor named Chales Babage. He designed the analytical engine and it was this design that the basic frame work of the computer of today are based on. 1st Generation 1937-1946 The first electronic digital computer was built by Dr John V. Atanasoff & Berry Cliford (ABC). In 1943 an electronic computer named colossus was built for military. 1946 – The first general purpose digital computer- the Electronic Numerical Integrator and computer (ENIAC) was built. This computer weighed 30 tons and had 18,000 vacuum tubes which were used for processing. -

Implementation, Verification and Validation of an Openrisc-1200
(IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 10, No. 1, 2019 Implementation, Verification and Validation of an OpenRISC-1200 Soft-core Processor on FPGA Abdul Rafay Khatri Department of Electronic Engineering, QUEST, NawabShah, Pakistan Abstract—An embedded system is a dedicated computer system in which hardware and software are combined to per- form some specific tasks. Recent advancements in the Field Programmable Gate Array (FPGA) technology make it possible to implement the complete embedded system on a single FPGA chip. The fundamental component of an embedded system is a microprocessor. Soft-core processors are written in hardware description languages and functionally equivalent to an ordinary microprocessor. These soft-core processors are synthesized and implemented on the FPGA devices. In this paper, the OpenRISC 1200 processor is used, which is a 32-bit soft-core processor and Fig. 1. General block diagram of embedded systems. written in the Verilog HDL. Xilinx ISE tools perform synthesis, design implementation and configure/program the FPGA. For verification and debugging purpose, a software toolchain from (RISC) processor. This processor consists of all necessary GNU is configured and installed. The software is written in C components which are available in any other microproces- and Assembly languages. The communication between the host computer and FPGA board is carried out through the serial RS- sor. These components are connected through a bus called 232 port. Wishbone bus. In this work, the OR1200 processor is used to implement the system on a chip technology on a Virtex-5 Keywords—FPGA Design; HDLs; Hw-Sw Co-design; Open- FPGA board from Xilinx. -

Programmable Logic Design Grzegorz Budzyń Lecture 11: Microcontroller
ProgrammableProgrammable LogicLogic DesignDesign GrzegorzGrzegorz BudzyBudzy ńń LLectureecture 11:11: MicrocontrollerMicrocontroller corescores inin FPGAFPGA Plan • Introduction • PicoBlaze • MicroBlaze • Cortex-M1 Introduction Introduction • There are dozens of 8-bit microcontroller architectures and instruction sets • Modern FPGAs can efficiently implement practically any 8-bit microcontroller • Available FPGA soft cores support popular instruction sets such as the PIC, 8051, AVR, 6502, 8080, and Z80 microcontrollers • Each significant FPGA producer offers their own soft core solution Introduction • Microcontrollers and FPGAs both successfully implement practically any digital logic function. • Each solution has unique advantages in cost, performance, and ease of use. • Microcontrollers are well suited to control applications, especially with widely changing requirements. • The FPGA resources required to implement the microcontroller are relatively constant. Introduction • The same FPGA logic is re-used by the various microcontroller instructions, conserving resources. • The program memory requirements grow with increasing complexity • Programming control sequences or state machines in assembly code is often easier than creating similar structures in FPGA logic • Microcontrollers are typically limited by performance. Each instruction executes sequentially. Introduction – block diagram Source:[1] FPGA vs Soft Core Microcontroller: – Easy to program, excellent for control and state machine applications – Resource requirements remain constant -

Pipeline and Vector Processing
Computer Organization and Architecture Chapter 4 : Pipeline and Vector processing Chapter – 4 Pipeline and Vector Processing 4.1 Pipelining Pipelining is a technique of decomposing a sequential process into suboperations, with each subprocess being executed in a special dedicated segment that operates concurrently with all other segments. The overlapping of computation is made possible by associating a register with each segment in the pipeline. The registers provide isolation between each segment so that each can operate on distinct data simultaneously. Perhaps the simplest way of viewing the pipeline structure is to imagine that each segment consists of an input register followed by a combinational circuit. o The register holds the data. o The combinational circuit performs the suboperation in the particular segment. A clock is applied to all registers after enough time has elapsed to perform all segment activity. The pipeline organization will be demonstrated by means of a simple example. o To perform the combined multiply and add operations with a stream of numbers Ai * Bi + Ci for i = 1, 2, 3, …, 7 Each suboperation is to be implemented in a segment within a pipeline. R1 Ai, R2 Bi Input Ai and Bi R3 R1 * R2, R4 Ci Multiply and input Ci R5 R3 + R4 Add Ci to product Each segment has one or two registers and a combinational circuit as shown in Fig. 9-2. The five registers are loaded with new data every clock pulse. The effect of each clock is shown in Table 4-1. Compiled By: Er. Hari Aryal [[email protected]] Reference: W. Stallings | 1 Computer Organization and Architecture Chapter 4 : Pipeline and Vector processing Fig 4-1: Example of pipeline processing Table 4-1: Content of Registers in Pipeline Example General Considerations Any operation that can be decomposed into a sequence of suboperations of about the same complexity can be implemented by a pipeline processor. -

NMOS 6510 Unintended Opcodes No More Secrets (V0.95 - 24/12/20)
NMOS 6510 Unintended Opcodes no more secrets (v0.95 - 24/12/20) (w) 2013-2020 groepaz/solution, all rights reversed Contents Preface...................................................................................................................................................I Scope of this Document....................................................................................................................I Intended Audience............................................................................................................................I License..............................................................................................................................................I What you get...................................................................................................................................II Naming Conventions.....................................................................................................................III Address-Mode Abbreviations...................................................................................................III Mnemonics................................................................................................................................III Processor Flags.........................................................................................................................IV Opcode Matrix......................................................................................................................................1 Unintended -

Softcores for FPGA: the Free and Open Source Alternatives
Softcores for FPGA: The Free and Open Source Alternatives Jeremy Bennett and Simon Cook, Embecosm Abstract Open source soft cores have reached a degree of maturity. You can find them in products as diverse as a Samsung set-top box, NXP's ZigBee chips and NASA's TechEdSat. In this article we'll look at some of the more widely used: the OpenRISC 1000 from OpenCores, Gaisler's LEON family, Lattice Semiconductor's LM32 and Oracle's OpenSPARC, as well as more bleeding edge research designs such as BERI and CHERI from Cambridge University Computer Laboratory. We'll consider the technology, the business case, the engineering risks, and the licensing challenges of using such designs. What do we mean by “free” “Free” is an overloaded term in English. It can mean something you don't pay for, as in “this beer is free”. But it can also mean freedom, as in “you are free to share this article”. It is this latter sense that is central when we talk about free software or hardware designs. Of course such software or hardware designs may also be free, in the sense that you don't have to pay for them, but that is secondary. “Free” software in this sense has been around for a very long time. Explicitly since 1993 and Richard Stallman's GNU Manifesto, but implicitly since the first software was written and shared with colleagues and friends. That freedom is achieved by making the source code available, so others can modify the program, hence the more recent alternative name “open source”, but it is freedom that remains the key concept. -

Implementation of PS2 Keyboard Controller IP Core for on Chip Embedded System Applications
The International Journal Of Engineering And Science (IJES) ||Volume||2 ||Issue|| 4 ||Pages|| 48-50||2013|| ISSN(e): 2319 – 1813 ISSN(p): 2319 – 1805 Implementation of PS2 Keyboard Controller IP Core for On Chip Embedded System Applications 1, 2, Medempudi Poornima, Kavuri Vijaya Chandra 1,M.Tech Student 2,Associate Proffesor. 1,2,Prakasam Engineering College,Kandukuru(post), Kandukuru(m.d), Prakasam(d.t). -----------------------------------------------------------Abstract----------------------------------------------------- In many case on chip systems are used to reduce the development cycles. Mostly IP (Intellectual property) cores are used for system development. In this paper, the IP core is designed with ALTERA NIOSII soft-core processors as the core and Cyclone III FPGA series as the digital platform, the SOPC technology is used to make the I/O interface controller soft-core such as microprocessors and PS2 keyboard on a chip of FPGA. NIOSII IDE is used to accomplish the software testing of system and the hardware test is completed by ALTERA Cyclone III EP3C16F484C6 FPGA chip experimental platform. The result shows that the functions of this IP core are correct, furthermore it can be reused conveniently in the SOPC system. ---------------------------------------------------------------------------------------------------------------------------------------- Date of Submission: 8 April 2013 Date Of Publication: 25, April.2013 --------------------------------------------------------------------------------------------------------------------------------------- -

Malware Detection Advances in Information Security
Malware Detection Advances in Information Security Sushil Jajodia Consulting Editor Center for Secure Information Systems George Mason University Fairfax, VA 22030-4444 email: ja jodia @ smu.edu The goals of the Springer International Series on ADVANCES IN INFORMATION SECURITY are, one, to establish the state of the art of, and set the course for future research in information security and, two, to serve as a central reference source for advanced and timely topics in information security research and development. The scope of this series includes all aspects of computer and network security and related areas such as fault tolerance and software assurance. ADVANCES IN INFORMATION SECURITY aims to publish thorough and cohesive overviews of specific topics in information security, as well as works that are larger in scope or that contain more detailed background information than can be accommodated in shorter survey articles. The series also serves as a forum for topics that may not have reached a level of maturity to warrant a comprehensive textbook treatment. Researchers, as well as developers, are encouraged to contact Professor Sushil Jajodia with ideas for books under this series. Additional titles in the series: ELECTRONIC POSTAGE SYSTEMS: Technology, Security, Economics by Gerrit Bleumer; ISBN: 978-0-387-29313-2 MULTIVARIATE PUBLIC KEY CRYPTOSYSTEMS by Jintai Ding, Jason E. Gower and Dieter Schmidt; ISBN-13: 978-0-378-32229-2 UNDERSTANDING INTRUSION DETECTION THROUGH VISUALIZATION by Stefan Axelsson; ISBN-10: 0-387-27634-3 QUALITY OF PROTECTION: Security Measurements and Metrics by Dieter Gollmann, Fabio Massacci and Artsiom Yautsiukhin; ISBN-10; 0-387-29016-8 COMPUTER VIRUSES AND MALWARE by John Aycock; ISBN-10: 0-387-30236-0 HOP INTEGRITY IN THE INTERNET by Chin-Tser Huang and Mohamed G.