Medical Note
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

To Search High and Low: Liang Sicheng, Lin Huiyin, and China's
Scapegoat Architecture/Landscape/Political Economy Issue 03 Realism 30 To Search High and Low: Liang Sicheng, Lin Huiyin, and China’s Architectural Historiography, 1932–1946 by Zhu Tao MISSING COMPONENTS Living in the remote countryside of Southwest Liang and Lin’s historiographical construction China, they had to cope with the severe lack of was problematic in two respects. First, they were financial support and access to transportation. so eager to portray China’s traditional architec- Also, there were very few buildings constructed ture as one singular system, as important as the in accordance with the royal standard. Liang and Greek, Roman and Gothic were in the West, that his colleagues had no other choice but to closely they highly generalized the concept of Chinese study the humble buildings in which they resided, architecture. In their account, only one dominant or others nearby. For example, Liu Zhiping, an architectural style could best represent China’s assistant of Liang, measured the courtyard house “national style:” the official timber structure exem- he inhabited in Kunming. In 1944, he published a plified by the Northern Chinese royal palaces and thorough report in the Bulletin, which was the first Buddhist temples, especially the ones built during essay on China’s vernacular housing ever written the period from the Tang to Jin dynasties. As a by a member of the Society for Research in Chi- consequence of their idealization, the diversity of nese Architecture.6 Liu Dunzhen, director of the China’s architectural culture—the multiple con- Society’s Literature Study Department and one of struction systems and building types, and in par- Liang’s colleagues, measured his parents’ country- ticular, the vernacular buildings of different regions side home, “Liu Residence” in Hunan province, in and ethnic groups—was roundly dismissed. -

Umithesis Lye Feedingghosts.Pdf
UMI Number: 3351397 INFORMATION TO USERS The quality of this reproduction is dependent upon the quality of the copy submitted. Broken or indistinct print, colored or poor quality illustrations and photographs, print bleed-through, substandard margins, and improper alignment can adversely affect reproduction. In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if unauthorized copyright material had to be removed, a note will indicate the deletion. ______________________________________________________________ UMI Microform 3351397 Copyright 2009 by ProQuest LLC All rights reserved. This microform edition is protected against unauthorized copying under Title 17, United States Code. _______________________________________________________________ ProQuest LLC 789 East Eisenhower Parkway P.O. Box 1346 Ann Arbor, MI 48106-1346 TABLE OF CONTENTS ABSTRACT iv ACKNOWLEDGEMENTS vi INTRODUCTION The Yuqie yankou – Present and Past, Imagined and Performed 1 The Performed Yuqie yankou Rite 4 The Historical and Contemporary Contexts of the Yuqie yankou 7 The Yuqie yankou at Puti Cloister, Malaysia 11 Controlling the Present, Negotiating the Future 16 Textual and Ethnographical Research 19 Layout of Dissertation and Chapter Synopses 26 CHAPTER ONE Theory and Practice, Impressions and Realities 37 Literature Review: Contemporary Scholarly Treatments of the Yuqie yankou Rite 39 Western Impressions, Asian Realities 61 CHAPTER TWO Material Yuqie yankou – Its Cast, Vocals, Instrumentation -
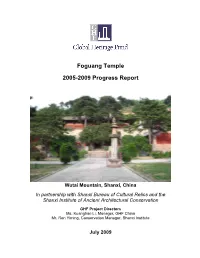
Foguang Temple 2005-2009 Progress Report
Foguang Temple 2005-2009 Progress Report Wutai Mountain, Shanxi, China In partnership with Shanxi Bureau of Cultural Relics and the Shanxi Institute of Ancient Architectural Conservation GHF Project Directors Ms. Kuanghan Li, Manager, GHF China Mr. Ren Yiming, Conservation Manager, Shanxi Institute July 2009 Executive Summary GHF helped the Shanxi provincial authority secure matching funding from the central government to support the restoration and scientific conservation of the 1,200-year old Foguang Temple at Wutai Mountain, one of China’s five sacred mountains for Buddhism. Over $900,000 in matching cofunding was secured from the Shanxi Provincial government for the work to date, and the Chinese national government is expected to fund approximately US$1.2-1.6 million (RMB10-12 million) for the restoration of the Grand East Hall that is projected to begin in 2010, contingent upon final approvals. Foguang Temple is considered to be the ‘Fountainhead’ of classical Chinese architecture. Built during the Tang Dynasty, Foguang Temple is a tribute to the peak of Buddhist art and architecture from the 9th century. Grand East Hall of Foguang Temple is one of the oldest and most significant extant wooden structures in China; it is one of two last remaining Tang Dynasty Chinese temples. Until GHF’s initiative, Foguang Temple had not been repaired or conserved since the 17th century. The temple suffers extensive structural damages caused by landslide, water damages from leaking roof, pests and foundation settlement; which are threatening to permanently damage Foguang Temple, the last of China’s oldest wooden architectural wonders. GHF carried out a multi-stage program at a total cost of over $1,060,000 to save the Temple Complex: 1) Master Conservation Planning 2) Architecture conservation The Foguang Temple project was completed under a collaborative agreement with Shanxi Institute of Ancient Architecture Conservation and Research (SIAACR). -

Chinese Religious Art
Chinese Religious Art Chinese Religious Art Patricia Eichenbaum Karetzky LEXINGTON BOOKS Lanham • Boulder • New York • Toronto • Plymouth, UK Published by Lexington Books A wholly owned subsidiary of Rowman & Littlefield 4501 Forbes Boulevard, Suite 200, Lanham, Maryland 20706 www.rowman.com 10 Thornbury Road, Plymouth PL6 7PP, United Kingdom Copyright © 2014 by Lexington Books All rights reserved. No part of this book may be reproduced in any form or by any electronic or mechanical means, including information storage and retrieval systems, without written permission from the publisher, except by a reviewer who may quote passages in a review. British Library Cataloguing in Publication Information Available Library of Congress Cataloging-in-Publication Data Karetzky, Patricia Eichenbaum, 1947– Chinese religious art / Patricia Eichenbaum Karetzky. pages cm Includes bibliographical references and index. ISBN 978-0-7391-8058-7 (cloth : alk. paper) — ISBN 978-0-7391-8059-4 (pbk. : alk. paper) — ISBN 978-0-7391-8060-0 (electronic) 1. Art, Chinese. 2. Confucian art—China. 3. Taoist art—China. 4. Buddhist art—China. I. Title. N8191.C6K37 2014 704.9'489951—dc23 2013036347 ™ The paper used in this publication meets the minimum requirements of American National Standard for Information Sciences—Permanence of Paper for Printed Library Materials, ANSI/NISO Z39.48-1992. Printed in the United States of America Contents Introduction 1 Part 1: The Beginnings of Chinese Religious Art Chapter 1 Neolithic Period to Shang Dynasty 11 Chapter 2 Ceremonial -

UNIVERSITY of CALIFORNIA, IRVINE Soteriology in the Female
UNIVERSITY OF CALIFORNIA, IRVINE Soteriology in the Female-Spirit Noh Plays of Konparu Zenchiku DISSERTATION submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSPHY in East Asian Languages and Literatures by Matthew Chudnow Dissertation Committee: Associate Professor Susan Blakeley Klein, Chair Professor Emerita Anne Walthall Professor Michael Fuller 2017 © 2017 Matthew Chudnow DEDICATION To my Grandmother and my friend Kristen オンバサラダルマキリソワカ Windows rattle with contempt, Peeling back a ring of dead roses. Soon it will rain blue landscapes, Leading us to suffocation. The walls structured high in a circle of oiled brick And legs of tin- Stonehenge tumbles. Rozz Williams Electra Descending ii TABLE OF CONTENTS Page ACKNOWLEDGEMENTS iv CURRICULUM VITAE v ABSTRACT OF DISSERTATION vi INTRODUCTION 1 CHAPTER 1: Soteriological Conflict and 14 Defining Female-Spirit Noh Plays CHAPTER 2: Combinatory Religious Systems and 32 Their Influence on Female-Spirit Noh CHAPTER 3: The Kōfukuji-Kasuga Complex- Institutional 61 History, the Daijōin Political Dispute and Its Impact on Zenchiku’s Patronage and Worldview CHAPTER 4: Stasis, Realization, and Ambiguity: The Dynamics 95 of Nyonin Jōbutsu in Yōkihi, Tamakazura, and Nonomiya CONCLUSION 155 BIBLIOGRAPHY 163 iii ACKNOWLEDGEMENTS This dissertation is the culmination of years of research supported by the department of East Asian Languages & Literatures at the University of California, Irvine. It would not have been possible without the support and dedication of a group of tireless individuals. I would like to acknowledge the University of California, Irvine’s School of Humanities support for my research through a Summer Dissertation Fellowship. I would also like to extend a special thanks to Professor Joan Piggot of the University of Southern California for facilitating my enrollment in sessions of her Summer Kanbun Workshop, which provided me with linguistic and research skills towards the completion of my dissertation. -
Parallel Session
Proceedings of Eco-Sophia 2011 Parallel Session -8th International Whitehead Conference- Creativity and Harmony: The Way of Eco-Sophia for the Future of Civilization September 26-29, 2011 The Yotsuya Campus, Sophia University, Tokyo, Japan Table of Contents Parallel Session Papers ABE Yoshihiko (Sophia junior college, Japan) p. 2 Sapientia convivendi in Life of Suso-Narratological Perspective of German Mysticism on the Horizon of Love and Reconciliation ANZAI Masahiro (Sophia University, Japan) p. 9 The reflect of the war-liking of logos-centrism- The way to co-exist and reconcile- Donna BOWMAN (University of Central Arkansas, U.S.A.) p. 16 Needle, Hook, Relational Wisdom: The Prayer Shawl Ministry As Creative Engagement With Fate John T. BRINKMAN (Commission on Ecology and Religion, Japan) p. 18 Harmony, Attribute of the Sacred and Phenomenal CHEN Aihua (Southeast University, China) p. 20 Environmental Moral Philosophical Review on the Logic of "City Charm" FAN Meijun (Center for Process Studies, U.S.A) p. 21 Ecological wisdom in Daoism Alexander HAITOS (Texas A&M University, U.S.A.) p. 33 Foreseeing novelty: Bergson and Whitehead on Possibility and Creation HANAOKA Eiko (Osaka Prefecture University, Japan) p. 52 Eco-sophia in “the Wisdom as prajuna viz. Love as agape” - through the change of paradigms- HAO Dong (China Community Party School, China) p. 58 Low-Carbon Technological Paradigm in Urbanization of China Brian G. HENNING (Gonzaga University, U.S.A.) p. 63 The Ontology of Collective Individuals and the Process Turn HIRATA Ichiro (Kansaigaidai College, Japan) p. 72 Continuity and Atomicity (p. 72-) Final Cause of Whitehead's Process and Reality (p. -
Timber Use in the Chinese Gardens and Architecture
Timber Use in the Chinese Gardens and Architecture 木材在中国园林及建筑中的应用 Ying JIANG 2012.05 CAUPD CAUPD • 1、Reasons why timber constructions appear and become mainstream in China • 为什么中国会发展出木结构建筑并形成主流 • 2 The development of timber constructions in ancient China • 木结构建筑在中国古代的发展 • 3 The development of timber constructions in ancient China • 木结构建筑在中国近现代的发展 • 4 The advantages of timber • 木材的优点 • 5 Conclusion • 结语 CAUPD • 1、Reasons why timber constructions appear and become mainstream in China • 为什么中国会发展出木结构建筑并形成主流 In the ancient times, the weather and geographical condition is suitable for growing Climate plants in the Yellow River basin. 气候 Hydrology 水文 Geography The dense forest and river here make it easy to get raw 地理 materials and transport them. CAUPD • 1、Reasons why timber constructions appear and become mainstream in China • 为什么中国会发展出木结构建筑并形成主流 Cutting easy Timber becomes 采伐容易 the first choice to build houses processing easy because it is lighter 加工容易 and more easily to cut and process. Light weight 重量轻 Mining hard 开采困难 processing hard 加工困难 heavy weight 重量沉 CAUPD • 1、Reasons why timber constructions appear and become mainstream in China • 为什么中国会发展出木结构建筑并形成主流 The Chinese philosophy- Taoism believes that the basic substances metal that compose the world are metal, wood, water, fire and soil, and each of them corresponds to one of the five direction. Soil represents Central on behalf of the load of all earth things and soil would have a earth water high status. Five elements of wood represent east and symbol of spring and vitality; while Gold acting on behalf of the West and a symbol of force and punishment to kill; water, fire for the intangible thing, therefore, the five elements fire wood represent the most advocates of the five substances, only "soil" and "wood" is the most suitable for the construction of housing people live. -
Records of the Transmission of the Lamp (Jingde Chuadeng
The Hokun Trust is pleased to support the fifth volume of a complete translation of this classic of Chan (Zen) Buddhism by Randolph S. Whitfield. The Records of the Transmission of the Lamp is a religious classic of the first importance for the practice and study of Zen which it is hoped will appeal both to students of Buddhism and to a wider public interested in religion as a whole. Contents Foreword by Albert Welter Preface Acknowledgements Introduction Appendix to the Introduction Abbreviations Book Eighteen Book Nineteen Book Twenty Book Twenty-one Finding List Bibliography Index Foreword The translation of the Jingde chuandeng lu (Jingde era Record of the Transmission of the Lamp) is a major accomplishment. Many have reveled in the wonders of this text. It has inspired countless numbers of East Asians, especially in China, Japan and Korea, where Chan inspired traditions – Chan, Zen, and Son – have taken root and flourished for many centuries. Indeed, the influence has been so profound and pervasive it is hard to imagine Japanese and Korean cultures without it. In the twentieth century, Western audiences also became enthralled with stories of illustrious Zen masters, many of which are rooted in the Jingde chuandeng lu. I remember meeting Alan Ginsburg, intrepid Beat poet and inveterate Buddhist aspirant, in Shanghai in 1985. He had been invited as part of a literary cultural exchange between China and the U. S., to perform a series of lectures for students at Fudan University, where I was a visiting student. Eager to meet people who he could discuss Chinese Buddhism with, I found myself ushered into his company to converse on the subject. -

Jewels of the Orient $ Per Person 1999 Twin Share Typically $3599
17 DAY FLY, TOUR & CRUISE JEWELS OF THE ORIENT $ PER PERSON 1999 TWIN SHARE TYPICALLY $3599 BEIJING • SHANGHAI • TOKYO • OSAKA • KOBE THE OFFER 17 DAY: INTERIOR STATEROOM Beijing, Shanghai, Tokyo, Osaka and beyond… the glittering jewels of China and Japan are yours to discover on this inspiring 17 day package featuring the game- $1999 changing Quantum of the Seas, or the brand new Spectrum of the Seas ship. Begin your cultural odyssey with visits to Tiananmen Square and the Forbidden 17 DAY: OCEAN VIEW STATEROOM City, walk along the mighty Great Wall of China, see giant pandas at Beijing Zoo, view the mesmerising Shanghai skyline, and more. Then, set sail for a relaxing seven night cruise aboard Royal Caribbean’s dazzling new Spectrum of $2199 the Seas or the 5-star Quantum of the Seas. Sail through the magical Japanese archipelago to Osaka, Kobe and Tokyo, enjoying free time to enjoy the highlights of these diverse cities at leisure. This incredible-value package includes return 17 DAY: BALCONY STATEROOM flights, eight nights 4-star hotel accommodation, a seven-night Royal Caribbean cruise, a one-way high speed rail journey and so much more! $2399 Want to see more? Upgrade to the 19 day package with Terracotta Warriors pre- tour extension. 19 DAY: INTERIOR STATEROOM $2499 19 DAY: OCEAN VIEW STATEROOM $2699 19 DAY: BALCONY STATEROOM $2899 *Please note: all information provided in this brochure is subject to both change and availability. Prior to purchase please check the current live deal at tripadeal.com.au or contact our customer service team on 135 777 for the most up-to-date information. -

The Process of Making 3D-Vector Scenograph of Ancient Building with Large Quantities of Data
Yixuan, Zhu THE PROCESS OF MAKING 3D-VECTOR SCENOGRAPH OF ANCIENT BUILDING WITH LARGE QUANTITIES OF DATA Yixuan ZHU*, Zhiyong CHEN** Wuhan Technical University of Surveying and Mapping Department of Information Engineering [email protected] Wuhan, China KEY WORDS: Block, Layer, Orthograph, Scenograph. ABSTRACT This paper offers an introduction of the making process of 3D-vector scenograph of an ancient building with large quantities of data with the aid of AutoCAD, which display the effect of scenery drawings. The vital skills and technique involved are illustrated through the example of Pagoda of Thousands of Buddha in Chi Lin Nunnery in HongKong. Which was started in the year of 1996 and finished in 1999 with the concrete structure internal and wood external, imitating the style of buildings in Tang Dynasty. Thus, 3D-vector scenograph become available to users. 1 INTRODUCTION Ancient buildings, as the essence of ancient Chinese culture, characterized by its complex and antique shape, delicate structure, compact combination and graceful sculpture, is welcomed globally. Some ancient buildings made of wood endure long because of its solid structure. For example, the existent Nanchan Temple and Foguang Temple on Wutai Mountain in Shanxi Province of China can be traced back to Tang Dynasty. Nowadays, the building techniques have been constantly renovated due to the integration of both old and new ones. Before the birth of computer, the available drawings and internal structure drawings were all made by hand. The scenery effect of the building perceived by human eyes was demonstrated in the drawings made by building artist. The popularity of the technology of CAD provides sufficient hardware and software environment for the making of 3D scenery effect drawings of shape and internal structure drawings. -

Meanings of Worship in Wooden Architecture in Brick
MEANINGS OF WORSHIP IN WOODEN ARCHITECTURE IN BRICK Yin Wu A thesis submitted to the faculty at the University of North Carolina at Chapel Hill in partial fulfillment of the requirements for the degree of Master of Arts in the Department of Art. Chapel Hill 2016 Approved by: Eduardo Douglas Wei-Cheng Lin Daniel Sherman @2016 Yin Wu ALL RIGHTS RESERVED ii ABSTRACT Yin Wu: Meanings of Worship in Wooden Architecture in Brick (Under the direction of Wei-Cheng Lin) The brick burial chamber built to imitate the wooden structure that became popular since the late Tang period was usually understood as a mimicry of the aboveground residence. Its more and more elaborate construction toward the Jin period was also often described as representing the maturity of the “wooden architecture in brick.” In this paper, however, I argue that the increasing elaboration of the form, in fact, indicates a changing meaning of the tombs. To this end, this paper investigates the “wooden architecture in brick” built in the 12th-century tombs of the Duan family in Jishan, Shanxi province from two interrelated viewpoints—that of the fabricated world of the tomb owner and that of the realistic world of the burial chamber. I suggest that the complicated style of “wooden architecture in brick” does not mean a more magnificent imitation of the aboveground residence. Rather, when considered with other decorations in the chamber, the burial space was constructed for the deceased with reference to a temple, or a shrine. This suggested reference thus turns the chamber into a space of the deity, where the tomb master was revered, indeed, as a deity. -

Experimental Investigation on the Lateral Structural Performance of A
Engineering Structures 167 (2018) 582–591 Contents lists available at ScienceDirect Engineering Structures journal homepage: www.elsevier.com/locate/engstruct Experimental investigation on the lateral structural performance of a T traditional Chinese pre-Ming dynasty timber structure based on half-scale pseudo-static tests ⁎ Xianjie Menga, Qingshan Yangb,c, Jianwei Weia, Tieying Lia, a School of Architecture and Civil Engineering, Taiyuan University of Technology, Taiyuan 030024, China b School of Civil Engineering, Chongqing University, Chongqing, China c Beijing’s Key Laboratory of Structural Wind Engineering and Urban Wind Environment, Beijing, China ARTICLE INFO ABSTRACT Keywords: Existing ancient Chinese timber buildings are frequently subjected to seismic or strong wind loads throughout Ancient timber building their lifetime, hence their lateral structural performance can undergo significant changes. It is essential to Lateral structural performance employ tests in the laboratory to study these variations to protect these existing timber buildings. In this paper, a Energy dissipation single-layer model of a timber building with a geometrical ratio of 1:2 was fabricated according to the pre-Ming Lateral stiffness dynasty construction method. Six pseudo-static tests were conducted under three levels of vertical loads. The Restoring force model timber structure displayed visible rocking characteristics during the tests, and the column feet and mortise-tenon joints were the weak links in the structure. The features of hysteresis curves, envelope curves, strength reduction, energy dissipation, and lateral stiffness of the timber structure were obtained, and their variations associated with loading courses were discussed. Moreover, a simplified restoring force model was built for this type of timber structure.