Multifidelity Space Mission Planning and Infrastructure Design Framework for Space Resource Logistics1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Spacenet: Modeling and Simulating Space Logistics
SpaceNet: Modeling and Simulating Space Logistics Gene Lee*, Elizabeth Jordan†, and Robert Shishko‡ Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA, 91109 Olivier de Weck§, Nii Armar**, and Afreen Siddiqi†† Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, Cambridge, MA, 02139 This paper summarizes the current state of the art in interplanetary supply chain modeling and discusses SpaceNet as one particular method and tool to address space logistics modeling and simulation challenges. Fundamental upgrades to the interplanetary supply chain framework such as process groups, nested elements, and cargo sharing, enabled SpaceNet to model an integrated set of missions as a campaign. The capabilities and uses of SpaceNet are demonstrated by a step-by-step modeling and simulation of a lunar campaign. I. Introduction HE term “supply chain” has traditionally been used to refer to terrestrial logistics and the flow of commodities Tin and out of manufacturing facilities, warehouses, and retail stores. Rather than focusing on local interests, optimizing the entire supply chain can reduce costs by using resources and performing operations as efficiently as possible. There is an increasing realization that future space missions, such as the buildup and sustainment of a lunar outpost, should not be treated as isolated missions but rather as an integrated supply chain. Supply chain management at the interplanetary level will maximize scientific return, minimize transportation costs, and reduce risk through increased system availability and robustness to failures.1,2 SpaceNet is a model with a graphical user interface (GUI) that allows a user to build, simulate, and evaluate exploration missions from a logistics perspective.3 The goal of SpaceNet is to provide mission planners, logisticians, and system engineers with a software tool that focuses on what cargo is needed to support future space missions, when it is required, and how propulsive vehicles can be used to deliver that cargo. -
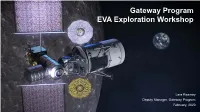
Gateway Program EVA Exploration Workshop
Gateway Program EVA Exploration Workshop Lara Kearney Deputy Manager, Gateway Program February, 2020 1 Gateway Deep Space Logistics with EVA Space Suits Gateway Gateway 2024 HALO Lander Crewed PPE Orion/SLS Uncrewed Orion/SLS 2023 late 2024 2023 early 2024 2023 2021 2 Gateway continues to build, adding International Habitat Refueler (ESPRIT) Robotic Arm Airlock 3 Gateway Program and Objectives • The Gateway will be a sustainable outpost in orbit around the Moon, which will serve as a platform for human space exploration, science, and technology development. – The Gateway shall be utilized to enable crewed missions to cislunar space including capabilities that enable surface missions to the lunar South Pole by 2024 (Crewed Missions) – The Gateway shall provide capabilities to meet scientific requirements for lunar discovery and exploration, as well as other science objectives (Science Requirements) – The Gateway shall be utilized to enable, demonstrate and prove technologies that are enabling for lunar surface missions that feed forward to Mars as well as other deep space destinations (Proving Ground & Technology Demonstration) – NASA shall establish industry and international partnerships to develop and operate the Gateway (Partnerships) 5 Gateway Program Philosophy • Incorporating lessons learned and best practices from International Space Station, Orion and Commercial Crew and Cargo Programs • Using fixed price contracts, commercially available hardware and commercial standards to the maximum extent possible • Pushing responsibility -

Gao-21-306, Nasa
United States Government Accountability Office Report to Congressional Committees May 2021 NASA Assessments of Major Projects GAO-21-306 May 2021 NASA Assessments of Major Projects Highlights of GAO-21-306, a report to congressional committees Why GAO Did This Study What GAO Found This report provides a snapshot of how The National Aeronautics and Space Administration’s (NASA) portfolio of major well NASA is planning and executing projects in the development stage of the acquisition process continues to its major projects, which are those with experience cost increases and schedule delays. This marks the fifth year in a row costs of over $250 million. NASA plans that cumulative cost and schedule performance deteriorated (see figure). The to invest at least $69 billion in its major cumulative cost growth is currently $9.6 billion, driven by nine projects; however, projects to continue exploring Earth $7.1 billion of this cost growth stems from two projects—the James Webb Space and the solar system. Telescope and the Space Launch System. These two projects account for about Congressional conferees included a half of the cumulative schedule delays. The portfolio also continues to grow, with provision for GAO to prepare status more projects expected to reach development in the next year. reports on selected large-scale NASA programs, projects, and activities. This Cumulative Cost and Schedule Performance for NASA’s Major Projects in Development is GAO’s 13th annual assessment. This report assesses (1) the cost and schedule performance of NASA’s major projects, including the effects of COVID-19; and (2) the development and maturity of technologies and progress in achieving design stability. -

Term Paper from a Prior Semester
1 US Permanent Space Presence An Analysis of the Technical and Political Decisions that led to the ISS 1) Introduction In the early 1980s, NASA began work on creating a permanent US space station. Originally called Space Station Freedom, the project was intended to be a mainly US endeavor with support from the Japanese Aerospace Exploration Agency (JAXA), European Space Agency (ESA), and Canadian Space Agency (CSA). However, as time went on, the project evolved into what is today the ISS with the addition of the Russian Roscosmos (ROSCOS) and other international partners. This paper will explore the history of this evolution through an analysis of the organizational decisions of the US government and NASA that resulted from the political and technological developments of the latter half of the 20th century. 2) The End of One Era and the Start of Another As the Apollo Program began to wind down in the 1970s, the focus began to shift towards the future of NASA and the US civilian space presence. While the creation of NASA was driven almost solely by the space race and the corresponding political motivations to beat the USSR, the scope of NASA itself was relatively broad regarding its space activities and purpose. As such, the scientists and engineers who had sent men to the Moon began to come up with ideas for the future. While countless individual proposals were floated around, three main themes began to emerge amongst them: manned missions to Mars, cheaper launch vehicles (improving space logistics) to enable more science and missions for less money, and a permanent US space presence (in the form of an orbiting space laboratory). -

Recommended Government Actions to Address Critical U.S. Space Logistics Needs
AIAA Space Logistics Technical Committee Position Paper (http://www.aiaa.org/tc/sl) Recommended Government Actions to Address Critical U.S. Space Logistics Needs Introduction The purpose of this position paper is to highlight the importance of assessing the nation’s space logistics needs and to propose specific Government actions to undertake this assessment. The three recommended actions are: 1. Establish a space logistics task force to assess the capabilities of the industrial base and the value of establishing the basic elements of an integrated space logistics infrastructure including: assured, routine space access for passengers and cargo; in-space mobility within the central solar system for passengers and cargo; and, in-space logistics support for civil, commercial, national security, and space exploration missions. 2. The space logistics task force, perhaps through appropriate supporting Government organizations, should contract with industry to conduct the conceptual design studies of near-term, reusable space access systems, e.g., two-stage RLVs, suitable for providing first-generation passenger and cargo transport to and from earth orbit. 3. In parallel with the operation of the space logistics task force and the conduct of the reusable space access conceptual design trade studies, establish a space logistics commission to identify and recommend the preferred strategy for organizing and funding Government and industry efforts to effectively and affordably undertake the development, production, and operation of an integrated space logistics infrastructure. Background Space Logistics Definition The definition of space logistics, derived from the commonly-accepted definition of military logistics, is: Space logistics is the science of planning and carrying out the movement of humans and materiel to, from and within space combined with the ability to maintain human and robotics operations within space. -

Logistics Lessons Learned in NASA Space Flight
NASA/TP-2006-214203 Logistics Lessons Learned in NASA Space Flight William A. (Andy) Evans, United Space Alliance Prof. Olivier de Weck, Massachusetts Institute of Technology Deanna Laufer, Massachusetts Institute of Technology Sarah Shull, Massachusetts Institute of Technology Kennedy Space Center, Florida May 2006 NASA STI Program ... in Profile Since its founding, NASA has been dedicated • CONFERENCE PUBLICATION. Collected to the advancement of aeronautics and space papers from scientific and technical science. The NASA scientific and technical conferences, symposia, seminars, or other information (STI) program plays a key part in meetings sponsored or co-sponsored helping NASA maintain this important role. by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information technical, or historical information from Officer. It collects, organizes, provides for NASA programs, projects, and missions, archiving, and disseminates NASA’s STI. The often concerned with subjects having NASA STI program provides access to the NASA substantial public interest. Aeronautics and Space Database and its public interface, the NASA Technical Report Server, • TECHNICAL TRANSLATION. English- thus providing one of the largest collections of language translations of foreign scientific aeronautical and space science STI in the world. and technical material pertinent to Results are published in both non-NASA channels NASA’s mission. and by NASA in the NASA STI Report Series, which includes the following report types: Specialized services also include creating custom thesauri, building customized databases, • TECHNICAL PUBLICATION. Reports of and organizing and publishing research results. completed research or a major significant phase of research that present the results of For more information about the NASA STI NASA Programs and include extensive data program, see the following: or theoretical analysis. -
State of the Space Industrial Base 2020 Report
STATE OF THE SPACE INDUSTRIAL BASE 2020 A Time for Action to Sustain US Economic & Military Leadership in Space Summary Report by: Brigadier General Steven J. Butow, Defense Innovation Unit Dr. Thomas Cooley, Air Force Research Laboratory Colonel Eric Felt, Air Force Research Laboratory Dr. Joel B. Mozer, United States Space Force July 2020 DISTRIBUTION STATEMENT A. Approved for public release: distribution unlimited. DISCLAIMER The views expressed in this report reflect those of the workshop attendees, and do not necessarily reflect the official policy or position of the US government, the Department of Defense, the US Air Force, or the US Space Force. Use of NASA photos in this report does not state or imply the endorsement by NASA or by any NASA employee of a commercial product, service, or activity. USSF-DIU-AFRL | July 2020 i ABOUT THE AUTHORS Brigadier General Steven J. Butow, USAF Colonel Eric Felt, USAF Brig. Gen. Butow is the Director of the Space Portfolio at Col. Felt is the Director of the Air Force Research the Defense Innovation Unit. Laboratory’s Space Vehicles Directorate. Dr. Thomas Cooley Dr. Joel B. Mozer Dr. Cooley is the Chief Scientist of the Air Force Research Dr. Mozer is the Chief Scientist at the US Space Force. Laboratory’s Space Vehicles Directorate. ACKNOWLEDGEMENTS FROM THE EDITORS Dr. David A. Hardy & Peter Garretson The authors wish to express their deep gratitude and appreciation to New Space New Mexico for hosting the State of the Space Industrial Base 2020 Virtual Solutions Workshop; and to all the attendees, especially those from the commercial space sector, who spent valuable time under COVID-19 shelter-in-place restrictions contributing their observations and insights to each of the six working groups. -

SPACE RACE: Commercialising the Path
SPACE RACE: Commercialising the Path Point-of-View July 2021 Contents From race of superpowers Roads to success to race of billionaires in exploring space What is shaping the space Who are in the space exploration industry of today? race of today? Future of in-space economy Introduction to What benefits will a space journey space exploration bring Executive summary for the economy? 2 Introduction to a space journey Journey into space started 50 years ago with nations’ race making first steps using moderate technology at hand… Key elements of space journey 50 years ago Nations’ Space race Single use rockets & costly shuttles First milestones achieved: 1st man in space Industry drivers: 1st step on the Moon ideology & national pride 1st space station 3 Source: BDO Centers analysis Introduction to a space journey …and continues with visionary leaders driving space into the era of affordable travel and game-changing projects Key elements of space journey now Billionaires’ Space race Ambitious projects Reusable, cheap, are about to come true: and big rockets moon base, people on Mars & beyond, space tourism Industry drivers: commercialisation & business leaders’ aspiration 4 Source: BDO Centers analysis Introduction to a space journey Active exploration and rapid growth of the global space industry enable multilateral perspectives in the future Key space players Prospective in-space industries Elon Musk Jeff Bezos Enable the Build the low-cost road to colonisation of Mars space to enable near-Earth Space Space logistics Space hospitality Space -

Lost Without Translation: Identifying Gaps in U.S. Perceptions of the Chinese Commercial Space Sector
LOST WITHOUT TRANSLATION IDENTIFYING GAPS IN U.S. PERCEPTIONS OF THE CHINESE COMMERCIAL SPACE SECTOR Promoting Cooperative Solutions For Space Sustainability FEBRUARY 2021 PAGE i U.S. commercial space stakeholders firmly believe that competition from Chinese actors will be an inevitable part of their future decision making. However, beyond this surety there are significant gaps in understanding of how this competitive relationship will develop. For these stakeholders it remains unclear who their Chinese competition will be, what resources they will have, and what rules they will operate by. By comparing common U.S. stakeholder perspectives with discourse and analysis on China’s commercial space sector, this paper highlights where more effort is required to better understand these emerging dynamics. This research challenges common narratives of a Chinese commercial space sector with unlimited financial support, direct government control, and long-term vision. It illuminates barriers to understanding the complexities and conflicts within China’s commercial ecosystem, thus providing nuance for one of the most challenging and heated topics in the space industry: U.S.-Sino space relations. This paper raises more questions than it answers, but these questions will help U.S. researchers, analysts, practitioners, and policymakers better investigate and understand the complex dynamics emerging in China’s nascent commercial space sector. FEBRUARY 2021 Authors Kathryn Walsh, Masters Student, University of Denver & SWF Research Intern (May-September -

What Exactly Is Space Logistics?
What Exactly is Space Logistics? James C. Breidenbach he realm of space has been dramatized and glamorized in popular books, tele- vision series, movies, and video games. Such phrases as “the final frontier” (from the opening lines of Star Trek) or “the ulti- Tmate high ground” (from Department of Defense and Air Force space doctrine documents) appeal to the adventurous side of our human spirit. On the other hand, the word “logistics” usually brings to mind very unglamorous and perhaps mundane aspects of our lives: miles-long trains of coal- filled hopper cars on our nation’s railway system, semi-trailer trucks hauling freight on the interstate highway system, or ships carrying containers of goods across the oceans. It might even include the service department of your auto dealer, if main- tenance and repair are part of your concept of logistics. You may have seen information on the space shuttle in the news and have inferred by now that resupply missions to the International Space Sta- tion, Hubble Space Telescope repair missions, and satellite deployment missions are space logistics—and you would be technically correct. The science of logistics as applied to our military space systems, however, is simultaneously very much like, and very different from, the examples of logistics given in the previous paragraph. The Ultimate High Ground Our national military space systems consist of satellites orbiting the earth (the space segment); ground-based systems to monitor and command the satellites (the control segment); various types of equipment to employ the capabilities of the satellites in orbit (the terminal, or user, segment); launch vehicles that carry satellites to orbit (the launch segment); and extensive launch-range systems to support those critical minutes that make the difference between success and failure—a failure that could result in years of effort and billions of tax dollars ending up as junk on the sea floor instead of a valuable asset orbiting the earth. -

D-Orbit Signs Contract with the European Space Agency
Press Release: D-Orbit signs contract with the European Space Agency D-Orbit signs contract with the European Space Agency under the Boost! Project - ESA’s Commercial Space Transportation Services and Support Programme The UK branch of the orbital transportation company will focus on logistics coordination and process standardisation between different European spaceports and launcher providers Cornwall, UK, July 20th, 2021: The UK branch of D-Orbit, a leader in the orbital transportation industry, has announced the signing of a contract with the European Space Agency (ESA) under the Boost! Project with ESA’s Commercial Space Transportation Services and Support Programme. The Responsive Microlauncher Service, which provides end-to-end delivery of payloads in orbit, is designed to utilise the upcoming small launchers that are due to be launching regularly from UK starting from 2022. The contract will focus on logistics coordination and process standardisation between different European spaceports and launcher providers. D-Orbit is ideally placed to offer end-to-end commercial space transportation services, according to the ambitions and requirements of the ESA Boost! Project. The UK branch of D-Orbit will play a key enabling role in support of the new European small satellite microlauncher capabilities with a focus on the UK. “We aim to exploit the D-Orbit group’s unique position in the value chain and develop a suite of small satellite focused value-added services, to actively drive business towards these new market players - this is the opportunity for the UK business” commented Chris Brunskill, Head of Programmes at the D-Orbit UK branch. -
Spaceport Improvement Program
Florida Spaceport Improvement Program PROJECT HANDBOOK 2018 This resource document was developed by: The Florida Department of Transportation Aviation and Spaceports Office M.S. 46 605 Suwannee Street Tallahassee, Florida 32399-0450 www.fdot.gov/aviation Florida ImprovementSpaceport Program 2018 PROJECT HANDBOOK Florida Department of Transportation Cover photo sources, Top to Bottom: NASA, SpaceX, and ULA. FLORIDA SPACEPORT IMPROVEMENT PROGRAM PROJECT HANDBOOK 2018 TABLE OF CONTENTS PREFACE .........................................................................................................................................................................................iii 01 INTRODUCTION ..................................................................................................................................................................1 Purpose of the Handbook .........................................................................................................................................3 Background: Spaceport Improvement Program ..............................................................................................3 Partnerships, Coordination, and Collaboration ...............................................................................................5 02 PROGRAM OVERVIEW ......................................................................................................................................................7 The Basics ......................................................................................................................................................................9