Copyrighted Material
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2016 Board of Directors Contents
EFFECTIVE FIRST DAY OF THE MONTH UNLESS OTHERWISE NOTED January 2016 BOARD OF DIRECTORS CONTENTS BOARD OF DIRECTORS | December 4-5, 2015 BOARD OF DIRECTORS 1 SOLO 28 The SCCA National Board of Directors met in Kansas City, Friday, December 4 and SEB Minutes 28 December 5, 2015. Area Directors participating were: John Walsh, Chairman, Dan Helman, Vice-Chairman, Todd Butler, Secretary; Bill Kephart, Treasurer; Dick Patullo, CLUB RACING 32 Lee Hill, Steve Harris, Bruce Lindstrand, Terry Hanushek, Tere Pulliam, Peter Zekert, CRB Minutes 32 Brian McCarthy and KJ Christopher and newly elected directors Arnold Coleman, Bob Technical Bulletin 41 Dowie and Jim Weidenbaum. Court of Appeals 52 Divisional Time Trials Comm. 53 The following SCCA, Inc. staff participated in the meeting: Lisa Noble, President RALLY 54 and CEO; Eric Prill, Chief Operations Officer; Mindi Pfannenstiel, Senior Director of RallyCross 54 Finance and Aimee Thoennes, Executive Assistant. Road Rally 56 Guests attending the meeting were Jim Wheeler, Chairman of the CRB. LINKS 57 The secretary acknowledges that these minutes may not appear in chronological order and that all participants were not present for the entire meeting. The meeting was called to order by Vice Chair Helman. Executive Team Report and Staff Action Items President Noble provided a review of 2015 key programs and deliverables with topic areas of core program growth, scca.com, and partnerships. Current initiatives to streamline event process with e-logbook tied into event registration, modernize timing systems in Pro Solo, connecting experiential programs (eg TNIA, Starting Line) to core programs. Multiple program offerings to enhance weekend events. -

Designed for Speed : Three Automobiles by Ferrari
Designed for speed : three automobiles by Ferrari Date 1993 Publisher The Museum of Modern Art Exhibition URL www.moma.org/calendar/exhibitions/411 The Museum of Modern Art's exhibition history— from our founding in 1929 to the present—is available online. It includes exhibition catalogues, primary documents, installation views, and an index of participating artists. MoMA © 2017 The Museum of Modern Art * - . i . ' ' y ' . Designed for Speed: Three Automobiles by Ferrari k \ ' . r- ; / THE MUSEUM OF MODERN ART, NEW YORK The nearer the automobile approaches its utilitarian ends, the more beautiful it becomes. That is, when the vertical lines (which contrary to its purpose) dominated at its debut, it was ugly, and people kept buying horses. Cars were known as "horseless carriages." The necessity of speed lowered and elongated the car so that the horizontal lines, balanced by the curves, dominated: it became a perfect whole, logically organized for its purpose, and it was beautiful. —Fernand Leger "Aesthetics of the Machine: The Manufactured Object, The Artisan, and the Artist," 1924 M Migh-performance sports and racing cars represent some of the ultimate achievements of one of the world's largest industries. Few objects inspire such longing and acute fascination. As the French critic and theorist Roland Barthes observed, "I think that cars today are almost the exact equiv alent of the great Gothic cathedrals: I mean the supreme creation of an era, conceived with passion by unknown artists, and consumed in image if not in usage by a whole population which appropriates them as a purely magical object." Unlike most machines, which often seem to have an antagonistic relationship with people, these are intentionally designed for improved handling, and the refinement of the association between man and machine. -

2008-2009 Design and Fabrication of a SAE Baja Race Vehicle
2008-2009 Design and Fabrication of a SAE Baja Race Vehicle A Major Qualifying Project Report Submitted to the Faculty of WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Bachelor of Science By: ____________________________ Derek Britton ____________________________ Jessy Cusack ____________________________ Alex Forti ____________________________ Patrick Goodrich ____________________________ Zachary Lagadinos ____________________________ Benjamin Lessard ____________________________ Wayne Partington ____________________________ Ethan Wyman Date: April 29,2009 ____________________________ Kenneth Stafford, Advisor ____________________________ James Van De Ven, Advisor ____________________________ Torbjorn Bergstrom, Advisor 1 Table of Contents List of Figures ..................................................................................................................... 5 List of Tables ...................................................................................................................... 9 Introduction ....................................................................................................................... 10 Design Goals ..................................................................................................................... 11 Chassis .............................................................................................................................. 13 Ergonomics................................................................................................................... -
2009 Autocross Entry Form
2021 AUTOCROSS / OPEN TRACK ENTRY FORM RMMR AX Event Classifications Stock Classes (ES, ESL, FS, FSL, LS, LSL): Mustang as produced with options available year of manufacture. One modification allowed over stock to suspension or gear ratio. Suspension must retain original configuration and ride height. Up to two modifications allowed to engine over stock. No power adders (eco boost excepted). No autocross or road race tires with wear indicators of less than 200 allowed. Allowed modifications are as follows: Suspension – higher rate springs, sway bars, wheels, and traction bars. One modification only. Shock absorbers are not considered a modification. No modification is allowed that does not adhere to the original suspension design and mounting points. Devices that allow for suspension alignment tuning are allowed. Upgraded brake system and steering systems that were not available for the model year are not allowed. Gear ratio – any gear ratio that was available during the model years covered by the class. Engine - intake manifold, carburetor, throttle body, air cleaner, exhaust headers, and chip upgrade. Two modifications only. Transmission – Transmission swaps/replacements are allowed only for transmissions that were available during the model year covered by the class. Street Prepared Classes (ESP, ESPL, FSP, FSPL, LSP, LSPL): Additional modifications allowed over stock. Car must be titled, have current license plates, be street driven. No major lightening is allowed. Car must have a full interior. The following models due to their superiority over the standard offerings of their model year are considered as Street Prepared cars:’93-’01 Cobra (non supercharged), Bullitt, ’03 –‘04 Mach1, 2012-13 Boss 302, 2011 - 2021 GT,’06 – ’21 Shelby GT/GTH/GT350 (non supercharged), and other non supercharged Shelby, Roush & Saleen models and all electric power vehicles. -

Revisiting the Compcars Dataset for Hierarchical Car Classification
sensors Article Revisiting the CompCars Dataset for Hierarchical Car Classification: New Annotations, Experiments, and Results Marco Buzzelli * and Luca Segantin Department of Informatics Systems and Communication, University of Milano-Bicocca, 20126 Milano, Italy; [email protected] * Correspondence: [email protected] Abstract: We address the task of classifying car images at multiple levels of detail, ranging from the top-level car type, down to the specific car make, model, and year. We analyze existing datasets for car classification, and identify the CompCars as an excellent starting point for our task. We show that convolutional neural networks achieve an accuracy above 90% on the finest-level classification task. This high performance, however, is scarcely representative of real-world situations, as it is evaluated on a biased training/test split. In this work, we revisit the CompCars dataset by first defining a new training/test split, which better represents real-world scenarios by setting a more realistic baseline at 61% accuracy on the new test set. We also propagate the existing (but limited) type-level annotation to the entire dataset, and we finally provide a car-tight bounding box for each image, automatically defined through an ad hoc car detector. To evaluate this revisited dataset, we design and implement three different approaches to car classification, two of which exploit the hierarchical nature of car annotations. Our experiments show that higher-level classification in terms of car type positively impacts classification at a finer grain, now reaching 70% accuracy. The achieved performance constitutes a baseline benchmark for future research, and our enriched set of annotations is made available for public download. -
PT & TT Car Classification Form
® NASA Performance Touring (PTD-PTF) & Time Trial (TTD-TTF) Car Classification Form--2018 (v13.1/15.1—1-15-18) Driver or Team Name________________________________ Date______________ Car Number________ Region_____________ e-mail________________________________________ Car Color_______________ If a team, list drivers’ names (two maximum per team): ___________________________________________ ___________________________________________ Vehicle: Year_______ Make______________ Model___________________ Special Edition?____________ NASA PT/TT Base Class _____________ Base Weight Listing (from PT/TT Rules)______________lbs. Minimum Competition Weight (w/driver)_______________lbs. Multiple ECU Maps? Describe switching method and HP levels:_____________________________________________ DYNO RE-CLASSED VEHICLES Only: (Only complete this section if the vehicle has been Dyno Re-classed by the National PT/TT Director!) New PT/TT Base Class Assigned by the National PT/TT Director:_________(Attach a copy of the re-classing e-mail) Maximum allowed Peak whp_________hp Minimum Competition Weight__________lbs. All cars with a Motor Swap, Aftermarket Forced Induction, Modified Turbo/Supercharger, Aftermarket Head(s), Increased Number of Camshafts, Hybrid Engine, and Ported Rotary motors MUST be assessed by the National PT/TT Director for re-classification into a new PT/TT Base Class! (See PT Rules sections 6.3.C and 6.4) (E-mail the information in the listed format in PT Rules section 6.4.2 to the National PT/TT Director at [email protected] to receive your new PT/TT Base Class) Note: Any car exceeding the Adjusted Weight/Horsepower Ratio limit for its class will be disqualified. (see PT Rules Section 6.1.2 and Appendix A of PT Rules). Proceed to calculate your vehicle’s Modification Points assessment for up-classing purposes. -
Installation Instructions
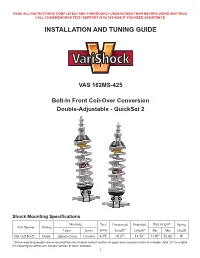
READ ALL INSTRUCTIONS COMPLETELY AND THOROUGHLY UNDERSTAND THEM BEFORE DOING ANYTHING. CALL CHASSISWORKS TECH SUPPORT (916) 388-0288 IF YOU NEED ASSISTANCE. INSTALLATION AND TUNING GUIDE VAS 162MS-425 Bolt-In Front Coil-Over Conversion Double-Adjustable - QuickSet 2 Shock Mounting Specifi cations Mounting Total Compressed Extended Ride Height* Spring Part Number Valving Upper LowerTravel Length* Length* Min. Max. Length VAS 162MS-425 Double Spherical Stem Crossbar 4.25” 10.27” 14.52” 11.97” 12.82” 9” * Shock mounting lengths are measured from the chassis contact surface of upper stem to pivot center of crossbar. Add .20” to lengths if measuring to control arm contact surface of lower crossbar. 1 PARTS LIST Prior to beginning installation use the following parts lists to verify that you have received all components required for installation. VAS 162MS-425 - VariShock QuickSet 2 Coil-Overs Part Number Qty Description 8A24XAX-43CH 2 QuickSet 2 Coil-Over Shock, Upper Stem and Short Lower Poly Mounts 3173-09-20-32 2 Bumpstop 1-1/4” long 899-020-208 2 Ball-Stud Top Mount Hardware VAS 501-103 1 Spring Seat Set, Extended 3/4” 3102-056-18RC 2 Jam Nut 9/16-18 RH, Clear Zinc 899-061-304 1 Crossbar Hardware Bag 899-012-HEX7/64 1 Ball-End Driver 7/64” Hex Screw 899-020-208 - Ball-Stud Top Mount Hardware Part Number Qty Description 3117-063-18C 1 Half Locknut 5/8-18 Nylon Insert 3144-25-28-0 1 Grease Zerk 1/4-28 Straight 899-044.63-1.13 1 Washer .635” ID x 1.13” OD, Zinc-Plated Steel 899-044.70-1.25 1 Washer .695” ID x 1.25” OD, Zinc-Plated Steel 899-060-201 -

Driving Resistances of Light-Duty Vehicles in Europe
WHITE PAPER DECEMBER 2016 DRIVING RESISTANCES OF LIGHT- DUTY VEHICLES IN EUROPE: PRESENT SITUATION, TRENDS, AND SCENARIOS FOR 2025 Jörg Kühlwein www.theicct.org [email protected] BEIJING | BERLIN | BRUSSELS | SAN FRANCISCO | WASHINGTON International Council on Clean Transportation Europe Neue Promenade 6, 10178 Berlin +49 (30) 847129-102 [email protected] | www.theicct.org | @TheICCT © 2016 International Council on Clean Transportation TABLE OF CONTENTS Executive summary ...................................................................................................................II Abbreviations ........................................................................................................................... IV 1. Introduction ...........................................................................................................................1 1.1 Physical principles of the driving resistances ....................................................................... 2 1.2 Coastdown runs – differences between EU and U.S. ........................................................ 5 1.3 Sensitivities of driving resistance variations on CO2 emissions ..................................... 6 1.4 Vehicle segments ............................................................................................................................. 8 2. Evaluated data sets ..............................................................................................................9 2.1 ICCT internal database ................................................................................................................. -
MY22 Sequoia Ebrochure
2022 Sequoia Page 1 2022 SEQUOIA Room for everyone and everything. Whether you’re navigating through the urban jungle or traveling off the beaten path, the 2022 Toyota Sequoia is ready to turn every drive into an adventure. Three rows of seats let you bring up to eight, while its spacious interior and powerful 5.7L V8 engine let you load it up and haul even more, to make the most of the places you’ll go. Limited shown in Shoreline Blue Pearl. Cover image: See footnotes 1 and 2 for information on towing and roof payload. See numbered footnotes in Disclosures section. Page 2 INTERIOR In Sequoia, everyone gets to ride first class. Hear Comfort your music like never before with the available JBL®3 within reach. Premium Audio system, and let your rear-seat passengers catch up on their favorite movies with the available rear-seat Blu-ray Disc™ player. Platinum interior shown in Red Rock leather trim. Simulation shown. Heated and ventilated front seats Moonroof Three-zone climate control The available heated and ventilated front Let more of the outside in with Sequoia’s The driver, front passenger and rear seats found inside Sequoia Platinum give standard one-touch tilt/slide power passengers will be comfortable inside the driver and front passenger more comfort moonroof with sliding sunshade. Open Sequoia, thanks to its three-zone automatic and the option to warm up or cool down it up to let in some fresh air, brighten climate control in the front and rear of the with the touch of a button. -

From Porsche Club of America--Golden Gate Region Date: December 4, 2007 2:39:13 PM PST To: [email protected] Reply-To: [email protected]
From: John Celona <[email protected]> Subject: From Porsche Club of America--Golden Gate Region Date: December 4, 2007 2:39:13 PM PST To: [email protected] Reply-To: [email protected] Porsche Club of America Golden Gate Region December, 2007 - Vol 47, Number 12 In This Issue Dear Porsche Enthusiast, Place dé Leglise Welcome to The Nugget, the email newsletter of the Golden Letter from the Editor Gate Region, Porsche Club of America. Competition Corner If you have any trouble viewing Membership Report this email, you can click here to go to the archive of PDF Board of Directors versions of this newsletter. For AX #10 comments or feedback, click here to email the editor. The Power Chef Thanks for reading. 40 Years Ago in the Nugget Registration for DE #6 Year End GGR Banquet Zone 7 Awards Dinner Crab 34 European Porsche Parade 2008 LA Lit & Toy Show Porsche Web Cinema Porsche Hybrid History Quick Links Event Calendar Classified Ads Join PCA Now Nugget Archive More About Us Zone 7 web site PCA web site Great Links Place dé Leglise --by Claude Leglise, GGR President The State of GGR There are only two events left on the GGR calendar for this year. Driver's Ed at Laguna Seca on December 9 - there are still slots available and the weather is holding up very nicely - and the Friday Night Social on December 21. The club has enjoyed a good year in 2007, yet some challenges face us. Andrew Forrest and the entire Time Trial crew have done a terrific job modernizing and revitalizing the TT Series. -
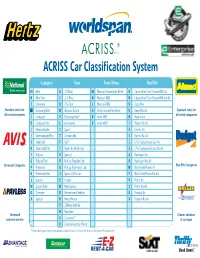
ACRISS Car Classification System
4WS 968 Car Industry Letter 6/12/06 09:15 Page 1 ACRISS Car Classification System Category Type Trans/Drive Fuel/Air M Mini B 2-3 Door M Manual Unspecified Drive R Unspecified Fuel/Power With Air N Mini Elite C 2/4 Door N Manual 4WD N Unspecified Fuel/Power Without Air E Economy D 4-5 Door C Manual AWD D Diesel Air Standard codes for H Economy Elite W Wagon/Estate A Auto Unspecified Drive Q Diesel No Air Standard codes for all rental companies all rental companies C Compact V PassengerVan* B Auto 4WD H Hybrid Air D Compact Elite L Limousine D Auto AWD I Hybrid No Air I Intermediate S Sport E Electric Air J Intermediate Elite T Convertible C Electric No Air S Standard F SUV* L LPG/Compressed Gas Air R Standard Elite J Open Air All Terrain S LPG/Compressed Gas No Air F Fullsize X Special A Hydrogen Air G Fullsize Elite P Pick up Regular Cab B Hydrogen No Air Increased Categories New Elite Categories P Premium Q Pick up Extended Cab M Multi Fuel/Power Air U Premium Elite Z Special Offer Car F Multi Fuel/Power No Air L Luxury E Coupe V Petrol Air W Luxury Elite M Monospace Z Petrol No Air O Oversize R Recreational Vehicle U Ethanol Air X Special H Motor Home X Ethanol No Air Y 2 Wheel Vehicle N Roadster Increased Greater selection customer service G Crossover* of car types K Commercial Van/Truck *These vehicle types require new booking codes which are listed in the chart on the back of this document. -

Improving Car Model Classification Through Vehicle Keypoint Localization
Improving Car Model Classification through Vehicle Keypoint Localization Alessandro Simoni2 a, Andrea D’Eusanio1 b, Stefano Pini2 c, Guido Borghi3 d and Roberto Vezzani1;2 e 1Artificial Intelligence Research and Innovation Center, University of Modena and Reggio Emilia, 41125 Modena, Italy 2Department of Engineering “Enzo Ferrari”, University of Modena and Reggio Emilia, 41125 Modena, Italy 3Department of Computer Science and Engineering, University of Bologna, 40126 Bologna, Italy Keywords: Car Model Classification, Vehicle Keypoint Localization, Multi-task Learning. Abstract: In this paper, we present a novel multi-task framework which aims to improve the performance of car model classification leveraging visual features and pose information extracted from single RGB images. In particular, we merge the visual features obtained through an image classification network and the features computed by a model able to predict the pose in terms of 2D car keypoints. We show how this approach considerably improves the performance on the model classification task testing our framework on a subset of the Pascal3D+ dataset containing the car classes. Finally, we conduct an ablation study to demonstrate the performance improvement obtained with respect to a single visual classifier network. 1 INTRODUCTION Only recently, some works in the literature have faced the classification problem trying to distinguish The classification of vehicles, and specifically car between vehicle macro-classes, such as aeroplane, models, is a crucial task in many real world applica- car and bicycle. For instance, in (Afifi et al., 2018) tions and especially in the automotive scenario, where a multi-task CNN architecture that performs vehi- controlling and managing the traffic can be quite com- cle classification and viewpoint estimation simultane- plex.