(Preprint) AAS 08-XXX CRATER IDENTIFICATION ALGORITHM
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Floris Heyne Joel Meter Simon Phillipson Delano Steenmeijer
Floris Heyne Joel Meter Simon Phillipson Delano Steenmeijer Edited by Neil Pearson With a special foreword by Apollo 7 astronaut Walt Cunningham “When you get back… you will be a national hero. But your photographs… they will live forever. Your only key to immortality is the quality of your photography.” Richard W. Underwood NASA Chief of Photography for Mercury, Gemini and Apollo 4 Small steps. Giant leaps. The English word ‘photograph’ is made up of the The early exploration of space is one such historical ancient Greek words ‘photos’ and ‘graphos’ which event, unrivaled among humanity’s achievements. literally mean ‘light writing’. At the time of the Apollo Fortunately space travelers were able to bring back program, that meant exposing a chemically-treated beautiful, moving and instantly recognizable images film to patterns of light and it was this process which to depict it. Those images add a new understanding made it possible to seize moments in time and share to what it means to be human, what it means to them with the world. live on a delicate little orb circling the Sun since time immemorial. A single photograph can tell a story to billions of people. It transcends language barriers, physical Not only did Apollo bring us this photographic barriers and requires no prior knowledge of testimony but many major advancements in the subject. This is the beauty of photography: photographic technology date back to the extensive it reaches out to all people and everybody can research and engineering that was part of the hugely intuitively understand its form and content. -

Time Travelers Camporee a Compilation of Resources
1 Time Travelers Camporee A Compilation of Resources Scouts, Ventures, Leaders & Parents…. This is a rather large file (over 80 pages). We have included a “Table of Contents” page to let you know the page numbers of each topic for quick reference. The purpose of this resources to aid the patrols, crews (& adults) in their selection of “Patrol Time Period” Themes. There are numerous amounts of valuable information that can be used to pinpoint a period of time or a specific theme /subject matter (or individual).Of course, ideas are endless, but we just hope that your unit can benefit from the resources below…… This file also goes along with the “Time Traveler” theme as it gives you all a look into a wide variety of subjects, people throughout history. The Scouts & Ventures could possibly use some of this information while working on some of their Think Tank entries. There are more events/topics that are not covered than covered in this file. However, due to time constraints & well, we had to get busy on the actual Camporee planning itself, we weren’t able to cover every event during time. Who knows ? You might just learn a thing or two ! 2 TIME TRAVELERS CAMPOREE PATROL & VENTURE CREW TIME PERIOD SELECTION “RESOURCES” Page Contents 4 Chronological Timeline of A Short History of Earth 5-17 World Timeline (1492- Present) 18 Pre-Historic Times 18 Fall of the Roman Empire/ Fall of Rome 18 Middle Ages (5th-15th Century) 19 The Renaissance (14-17th Century) 19 Industrial Revolution (1760-1820/1840) 19 The American Revolutionary War (1775-1783) 19 Rocky Mountain Rendezvous (1825-1840) 20 American Civil War (1861-1865) 20 The Great Depression (1929-1939) 20 History of Scouting Timeline 20-23 World Scouting (Feb. -

The Widespread Distribution of Swirls in Lunar Reconnaissance Orbiter Camera Images
EPSC Abstracts Vol. 10, EPSC2015-854, 2015 European Planetary Science Congress 2015 EEuropeaPn PlanetarSy Science CCongress c Author(s) 2015 The Widespread Distribution of Swirls in Lunar Reconnaissance Orbiter Camera Images Brett W. Denevi (1), Mark S. Robinson (2), Aaron K. Boyd (2), and David T. Blewett (1) (1) The Johns Hopkins University Applied Physics Laboratory, Laurel, MD, USA, (2) School of Earth and Space Exploration, Arizona State University, Tempe, AZ, USA. Email: [email protected]. 1. Introduction fresh plagioclase-rich materials from their shocked or glassy equivalent in the highlands. Lunar swirls are Lunar swirls, the sinuous high- and low-reflectance characterized by this steep UV slope [11], such that a features that cannot be mentioned without the WAC color composite (415 nm, 321/415 nm, and associated adjective “enigmatic,” are of interest 321/360 nm in red, green, and blue, respectively) because of their link to crustal magnetic anomalies reveals their locations (e.g., Fig. 1). We used this [1,2]. These localized magnetic anomalies create WAC composite sampled at 400 m/pixel as the basis mini-magnetospheres [3,4] and may alter the typical for our mapping, noting the locations and margins of surface modification processes or result in altogether the high-reflectance portions of swirls based on their distinct processes that form the swirls. One UV ratios and 415 nm reflectance values. hypothesis is that magnetic anomalies may provide some degree of shielding from the solar wind [1,2], 3. Distribution of Swirls which could impede space weathering due to solar The WAC-based map (Fig. -

Lunar Magnetic Field Models from Lunar Prospector and SELENE/Kaguya Along-Track Magnetic Field Gradients
Downloaded from orbit.dtu.dk on: Oct 08, 2021 Lunar magnetic field models from Lunar Prospector and SELENE/Kaguya along-track magnetic field gradients Ravat, D.; Purucker, M.E.; Olsen, N. Published in: Journal of Geophysical Research: Planets Link to article, DOI: 10.1029/2019JE006187 Publication date: 2020 Document Version Publisher's PDF, also known as Version of record Link back to DTU Orbit Citation (APA): Ravat, D., Purucker, M. E., & Olsen, N. (2020). Lunar magnetic field models from Lunar Prospector and SELENE/Kaguya along-track magnetic field gradients. Journal of Geophysical Research: Planets, 125(7), [e2019JE006187]. https://doi.org/10.1029/2019JE006187 General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. Users may download and print one copy of any publication from the public portal for the purpose of private study or research. You may not further distribute the material or use it for any profit-making activity or commercial gain You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. RESEARCH ARTICLE Lunar Magnetic Field Models From Lunar Prospector and 10.1029/2019JE006187 SELENE/Kaguya Along‐Track -

Bulk Mineralogy of Lunar Crater Central Peaks Via Thermal Infrared Spectra from the Diviner Lunar Radiometer - a Study of the Moon’S Crustal Composition at Depth
Bulk mineralogy of Lunar crater central peaks via thermal infrared spectra from the Diviner Lunar Radiometer - A study of the Moon’s crustal composition at depth Eugenie Song A thesis submitted in partial fulfillment of the requirements for the degree of Master of Sciences University of Washington 2012 Committee: Joshua Bandfield Alan Gillespie Bruce Nelson Program Authorized to Offer Degree: Earth and Space Sciences 1 Table of Contents List of Figures ............................................................................................................................................... 3 List of Tables ................................................................................................................................................ 3 Abstract ......................................................................................................................................................... 4 1 Introduction .......................................................................................................................................... 5 1.1 Formation of the Lunar Crust ................................................................................................... 5 1.2 Crater Morphology ................................................................................................................... 7 1.3 Spectral Features of Rock-Forming Silicates in the Lunar Environment ................................ 8 1.4 Compositional Studies of Lunar Crater Central Peaks ........................................................... -

Mini-Rf Observations of the Radar Scattering Properties of Young Lunar Crater Ejecta Blankets
45th Lunar and Planetary Science Conference (2014) 2720.pdf MINI-RF OBSERVATIONS OF THE RADAR SCATTERING PROPERTIES OF YOUNG LUNAR CRATER EJECTA BLANKETS. G. W. Patterson1, A. M. Stickle1, D. B. J. Bussey1, J. T. S. Cahill1 and the Mini-RF Team, 1Johns Hopkins University Applied Physics Laboratory, Laurel, MD ([email protected]). Introduction: Impact cratering is a primary weath- taken as an average over a select azimuthal range. This ering process of airless bodies and is the dominant is especially useful for examining asymmetries in ejecta method of redistributing material across the lunar sur- blankets due to oblique impacts or anomalous signals face [1]. Crater ejecta blankets are a window into the due to topography. The lunar crater Louville D serves impact cratering process and can provide important as an example. Louville D is a 7-km crater on the information regarding the properties of subsurface ma- western edge of Sinus Roris. This crater does not have terials. Here, we use radar scattering information, in an exceptionally bright ejecta blanket in optical images, particular the circular polarization ratio (CPR) [e.g., 2] but it shows up clearly in Mini-RF radar products (Fig. and an m-χ decomposition [3], to investigate properties 1). A radially averaged profile that includes all azi- of lunar crater ejecta. Previous work has examined the muths shows a distinct spike in the S1 parameter for implications of radar scattering associated with the Louville D. By excluding a specific azimuthal range ejecta blanket of the crater Byrgius A for understanding from the profile, the source of the spike in S1 can be ejecta thickness and emplacement mechanism [4]. -

Chapter 12 – Energy Signature Model
Cratering of the earth: Chapter 12 cratering earth.com Chapter 12: The energy signature cratering model Copyrighted by WR. Barnhart, 5/15/2021 Abstract The concept of an energy signature specific to shock-release wave pairs is proposed as an additional evidence to identify impact craters. The movement from extreme high to extreme low by way of an adiabatic dispersion leaves a distinct pattern which I will label a “release wave valley” in topography and gravity readings. Examples of this unique expression are discussed on the Moon, Venus and Earth and their association with impact cratering is pointed out. The cratering process is analyzed to determine where this adiabatic response occurs, and to develop a cratering mechanism around it. Introduction Looking at the vast majority of all moon craters on the GRAIL map, the map that shows the density of the rock, they have blue bottoms (low density) and red or yellow rims (high density) [Chapter 10A]. While the rims show the effect of high compressional energy, the crater’s bottoms show the opposite effect of expansion energy. If a crater was formed by just a compressional wave that was pushing the rock out and blasted ballistic ejecta even further as Shoemaker (1974) proposed with the cratering model still used by NASA (see Chapter 8, Figure 8.3), would it not have compressed the bottom of the crater the same way it did the rim and produce a high gravity reading across the entire crater? The form of a shock-release wave From the Greek word kryptos: where something is hidden or put out of sight, the word “cryptoexplosions” was coined for the force forming craters that were later recognized as meteor impact structures (French 1998). -
Some Milestones in History of Science About 10,000 Bce, Wolves Were Probably Domesticated
Some Milestones in History of Science About 10,000 bce, wolves were probably domesticated. By 9000 bce, sheep were probably domesticated in the Middle East. About 7000 bce, there was probably an hallucinagenic mushroom, or 'soma,' cult in the Tassili-n- Ajjer Plateau in the Sahara (McKenna 1992:98-137). By 7000 bce, wheat was domesticated in Mesopotamia. The intoxicating effect of leaven on cereal dough and of warm places on sweet fruits and honey was noticed before men could write. By 6500 bce, goats were domesticated. "These herd animals only gradually revealed their full utility-- sheep developing their woolly fleece over time during the Neolithic, and goats and cows awaiting the spread of lactose tolerance among adult humans and the invention of more digestible dairy products like yogurt and cheese" (O'Connell 2002:19). Between 6250 and 5400 bce at Çatal Hüyük, Turkey, maces, weapons used exclusively against human beings, were being assembled. Also, found were baked clay sling balls, likely a shepherd's weapon of choice (O'Connell 2002:25). About 5500 bce, there was a "sudden proliferation of walled communities" (O'Connell 2002:27). About 4800 bce, there is evidence of astronomical calendar stones on the Nabta plateau, near the Sudanese border in Egypt. A parade of six megaliths mark the position where Sirius, the bright 'Morning Star,' would have risen at the spring solstice. Nearby are other aligned megaliths and a stone circle, perhaps from somewhat later. About 4000 bce, horses were being ridden on the Eurasian steppe by the people of the Sredni Stog culture (Anthony et al. -
Terra Australis 29
terra australis 29 Terra Australis reports the results of archaeological and related research within the south and east of Asia, though mainly Australia, New Guinea and island Melanesia — lands that remained terra australis incognita to generations of prehistorians. Its subject is the settlement of the diverse environments in this isolated quarter of the globe by peoples who have maintained their discrete and traditional ways of life into the recent recorded or remembered past and at times into the observable present. Since the beginning of the series, the basic colour on the spine and cover has distinguished the regional distribution of topics as follows: ochre for Australia, green for New Guinea, red for South-East Asia and blue for the Pacific Islands. From 2001, issues with a gold spine will include conference proceedings, edited papers and monographs which in topic or desired format do not fit easily within the original arrangements. All volumes are numbered within the same series. List of volumes in Terra Australis Volume 1: Burrill Lake and Currarong: Coastal Sites in Southern New South Wales. R.J. Lampert (1971) Volume 2: Ol Tumbuna: Archaeological Excavations in the Eastern Central Highlands, Papua New Guinea. J.P. White (1972) Volume 3: New Guinea Stone Age Trade: The Geography and Ecology of Traffic in the Interior. I. Hughes (1977) Volume 4: Recent Prehistory in Southeast Papua. B. Egloff (1979) Volume 5: The Great Kartan Mystery. R. Lampert (1981) Volume 6: Early Man in North Queensland: Art and Archaeology in the Laura Area. A. Rosenfeld, D. Horton and J. Winter (1981) Volume 7: The Alligator Rivers: Prehistory and Ecology in Western Arnhem Land. -
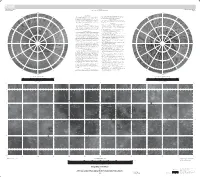
Image Map of the Moon
U.S. Department of the Interior Prepared for the Scientific Investigations Map 3316 U.S. Geological Survey National Aeronautics and Space Administration Sheet 1 of 2 180° 0° 5555°° –55° Rowland 150°E MAP DESCRIPTION used for printing. However, some selected well-known features less that 85 km in diameter or 30°E 210°E length were included. For a complete list of the IAU-approved nomenclature for the Moon, see the This image mosaic is based on data from the Lunar Reconnaissance Orbiter Wide Angle 330°E 6060°° Gazetteer of Planetary Nomenclature at http://planetarynames.wr.usgs.gov. For lunar mission C l a v i u s –60°–60˚ Camera (WAC; Robinson and others, 2010), an instrument on the National Aeronautics and names, only successful landers are shown, not impactors or expended orbiters. Space Administration (NASA) Lunar Reconnaissance Orbiter (LRO) spacecraft (Tooley and others, 2010). The WAC is a seven band (321 nanometers [nm], 360 nm, 415 nm, 566 nm, 604 nm, 643 nm, and 689 nm) push frame imager with a 90° field of view in monochrome mode, and ACKNOWLEDGMENTS B i r k h o f f Emden 60° field of view in color mode. From the nominal 50-kilometer (km) polar orbit, the WAC This map was made possible with thanks to NASA, the LRO mission, and the Lunar Recon- Scheiner Avogadro acquires images with a 57-km swath-width and a typical length of 105 km. At nadir, the pixel naissance Orbiter Camera team. The map was funded by NASA's Planetary Geology and Geophys- scale for the visible filters (415–689 nm) is 75 meters (Speyerer and others, 2011). -

Rayed Craters on the Far Side of the Moon
Sci. Rep. Kanazawa Univ. 49 Vol.47, No.1,2, p.49-58, 2003 Rayed craters on the far side of the Moon Tomokatsu MOROTA and Muneyoshi FURUMOTO Department of Earth Sciences, Faculty of Science, Kanazawa University, Kanazawa 920 -1192, Japan Abstract : A fresh crater on the Moon is associated with bright rays, which are made of fresh ejecta from the main and secondary craters. Rays of a lunar crater generally be- come indistinguishable from the background materials with the age, and the lifetime of a ray is supposed to be about 0.8 Gyr. Using Clementine 750-nm mosaic images, we iden- tify rayed craters mainly on the far side of the Moon. A total of 235 rayed craters which are larger than 5 km in diameter are identified in an area of about 1.55 x 107 km2.The size-frequency distribution for the rayed craters indicates a lack of small rayed craters, implying that the preservation of ray depends on the crater size. 1. Introduction There are many craters which have bright rays on the Moon. Rays of craters are made of fresh ejecta from the main and secondary craters [e.g., Shoemaker, 1966 ; Schmitt et al ., 1967 ; Trask and Rowan, 1967]. They are gradually obliterated with the exposure time by soil maturation and impact gardening (i.e., a turnover of the ejecta layer). Lunar rays gener- ally become indistinguishable from the background materials around the age of the Era- tosthenian/Copernican boundary. The age of the Copernicus crater, whose ray is almost mature [Pieters et al ., 1985 ; McEwen et al ., 1993], is estimated as about 0.8 b.y. -

Mineralogical Survey of the Anorthositic Feldspathic Highlands Terrane Crust Using Moon Mineralogy Mapper Data M
Mineralogical survey of the anorthositic Feldspathic Highlands Terrane crust using Moon Mineralogy Mapper data M. Martinot, Jessica Flahaut, S. Besse, C. Quantin-Nataf, W. van Westrenen To cite this version: M. Martinot, Jessica Flahaut, S. Besse, C. Quantin-Nataf, W. van Westrenen. Mineralogical survey of the anorthositic Feldspathic Highlands Terrane crust using Moon Mineralogy Mapper data. Icarus, Elsevier, 2020, 345, pp.113747. 10.1016/j.icarus.2020.113747. hal-02530351 HAL Id: hal-02530351 https://hal.archives-ouvertes.fr/hal-02530351 Submitted on 27 Aug 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Icarus 345 (2020) 113747 Contents lists available at ScienceDirect Icarus journal homepage: www.elsevier.com/locate/icarus Mineralogical survey of the anorthositic Feldspathic Highlands Terrane crust using Moon Mineralogy Mapper data M. Martinot a,b,<, J. Flahaut c, S. Besse d, C. Quantin-Nataf b, W. van Westrenen a a Faculty of Science, Vrije Universiteit Amsterdam, De Boelelaan 1085, 1081 HV Amsterdam, The Netherlands b UMR CNRS 5276 LGLTPE, Université Claude-Bernard Lyon 1, Lyon 69622, France c Centre de Recherches Pétrographiques et Géochimiques, CNRS/Université de Lorraine F-54500, Vandoeuvre-lès-Nancy, France d European Space Astronomy Centre, P.O.