Integrated Microsimulation Modelling of Crowd and Subway Network Dynamics for Disruption Management Support by Sivakrishna Sriku
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Don Valley Hills & Dales
GETTING THERE AND BACK Explore the scenic hills and dales of the Don 2 RIVERDALE FARM You can reach the suggested starting point on River Valley. Discover panoramic views, This farm, which is operated as it would in the 19th public transit by taking the BLOOR/DANFORTH an urban farm and the splendid park-like century, has resident staff who garden, milk cows subway to Broadview Station. The same atmosphere of Toronto’s oldest cemetery. and gather eggs daily. Resident animals include subway line serves two suggested tour end horses, pigs, sheep, goats, chickens and ducks. points, Broadview and Castle Frank stations. THE ROUTES Visit heritage structures including an 1858 barn moved to this site. DON VALLEY HILLS AND DALES DISCOVERY WALK This Discovery Walk consists of a variety 3 TORONTO NECROPOLIS of loops running around and through the Necropolis is Greek for “city of the dead”. This Don Valley. Although you can begin your historic cemetery is the resting place of many early Don Valley journey from any point along the walk, a good pioneers and Toronto’s rst mayor, William Lyon starting point is Broadview Subway Station. Mackenzie. Enjoy the peaceful park-like grounds Experience scenic views from the Prince Edward which include an impressive collection of trees. Hills & Dales Viaduct, Riverdale Farm, and the Toronto Necropolis. Side trips adjacent to this walk are One in a series of self-guided walks Cabbagetown and Rosedale neighbourhoods. 4 PRINCE EDWARD VIADUCT ACCESSIBLE DISCOVERY WALK Enjoy the panoramic view of the river valley from the Viaduct, one of Toronto’s most impressive Working in compliance with AODA human-made structures, built across the Don (Accessibility for Ontarians with Valley in the late 1910s. -
Second Exit Program Automatic Entrance at Five Stations
Form Revised: February 2005 TORONTO TRANSIT COMMISSION REPORT NO. MEETING DATE: May 28, 2009 SUBJECT: FIRE VENTILATION UPGRADE SECOND EXIT PROGRAM AUTOMATIC ENTRANCE AT FIVE STATIONS ACTION ITEM RECOMMENDATION It is recommended that the Commission authorize staff to convert the conceptual layouts of second exits from a daily exit configuration to an automatic entrance configuration at five stations: College, Museum, Dundas, Dundas West and Wellesley, as outlined in this report. FUNDING Funds for the Second Exit Program are included in Program 3.9 – Buildings and Structures – Fire Ventilation Upgrade Project, as set out in pages 781-792, State of Good Repair/Safety Category of the TTC’s 2009-2013 Capital Program, which was approved by City Council on December 10, 2008. Reconfiguration of the second exits to automatic entrances will require additional funds based on specific site conditions. The increase in cost will be reflected in the 2010-2014 Capital Program Budget. BACKGROUND A Fire and Life Safety Assessment Study completed in 2002 identified fourteen high priority stations requiring an alternate means of egress from the station platform. Subsequently, the Second Exit Program was incorporated into the Fire Ventilation Upgrade Project to provide a second means of egress from station platforms at the following fourteen high priority stations: Broadview; Castle Frank; Pape; Dufferin; College; Museum; Wellesley; Dundas; Dundas West; Woodbine; Chester; Donlands; Greenwood; and Summerhill. FIRE VENTILATION UPGRADE SECOND EXIT PROGRAM AUTOMATIC -
Relief Line South Environmental Project Report, Section 5 Existing and Future Conditions
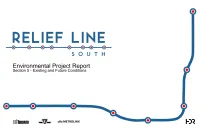
Relief Line South Environmental Project Report Section 5 - Existing and Future Conditions The study area is unique in that it is served by most transit modes that make up the Greater 5 Existing and Future Conditions Toronto Area’s (GTA’s) transit network, including: The description of the existing and future environment within the study area is presented in this • TTC Subway – High-speed, high-capacity rapid transit serving both long distance and local section to establish an inventory of the baseline conditions against which the potential impacts travel. of the project are being considered as part of the Transit Project Assessment Process (TPAP). • TTC Streetcar – Low-speed surface routes operating on fixed rail in mixed traffic lanes (with Existing transportation, natural, social-economic, cultural, and utility conditions are outlined some exceptions), mostly serving shorter-distance trips into the downtown core and feeding within this section. More detailed findings for each of the disciplines have been documented in to / from the subway system. the corresponding memoranda provided in the appendices. • TTC Conventional Bus – Low-speed surface routes operating in mixed traffic, mostly 5.1 Transportation serving local travel and feeding subway and GO stations. • TTC Express Bus – Higher-speed surface routes with less-frequent stops operating in An inventory of the existing local and regional transit, vehicular, cycling and pedestrian mixed traffic on high-capacity arterial roads, connecting neighbourhoods with poor access transportation networks in the study area is outlined below. to rapid transit to downtown. 5.1.1 Existing Transit Network • GO Rail - Interregional rapid transit primarily serving long-distance commuter travel to the downtown core (converging at Union Station). -

Pre-Construction Notice May 9, 2016
Pre-construction Notice May 9, 2016 Broadview Station Bus Roadway Rehabilitation Projected Schedule: June 20 to September 3, 2016 Work description and purpose TTC will be rehabilitating large sections of the bus roadway at Broadview Station to maintain a state of good repair. To safely and efficiently complete the work, the bus roadway will be closed for the duration of the project. Customers will be required to board and exit buses outside of the station on the south side of Erindale Avenue. Streetcar service at Broadview Station will be maintained with the exception of some weekends (to be confirmed). If there are any changes, customers and residents will be notified. To maintain customer safety, protective hoarding will be installed along the bus roadway including in front of the main entrance and some areas of the customer platform. Work hours Work will take place on week days between 7 a.m. and 7 p.m, and on Saturdays between 9 a.m. and 7 p.m., as required. TTC service changes (June 20 to September 3, 2016) Buses will not enter the bus roadway during the project. Buses will divert around the station via Erindale Avenue, Ellerbeck Avenue and Danforth Avenue back to regular routing on Broadview Avenue. Bus routes affected are: 8 Broadview, 62 Mortimer, 87 Cosburn, 100 Flemingdon Park, 322 Coxwell o Customers will board and exit buses on Erindale Avenue – temporary bus stops will be installed. o Customers will require Proof-of-Payment when transferring to and from Broadview Station. 504 King and 505 Dundas streetcar service at Broadview Station will be maintained with the exception of some weekends (work and dates to be confirmed). -

King Street Service Changes During Toronto International Film Festival
King Street Service Changes During Toronto International Film Festival September 10-13, 2015 King Street West will be closed between Peter Street and University Avenue from Thursday, September 10 to Sunday, September 13, 2015 as Toronto celebrates the 40th Annual Toronto International Film Festival. This road closure requires several changes to the TTC 504 King streetcar and bus service. 504 King streetcar will be split into east and west sections. There will be no streetcar service between York Street and Bathurst Street. • East section: from Broadview Station, streetcars will travel west on King Street, south on Church Street, west on Wellington Street, north on York Street and east on King Street returning to Broadview Station. • West section: from Dundas West Station, streetcars will travel east on King Street, north on Bathurst Street to Bathurst Station returning to Dundas West Station via south on Bathurst Street and west on King Street. 504 King buses will be available to bridge service between York Street and Bathurst Street and will travel as follows: • Westbound: originating from King Street at Parliament Street, buses will travel west on King Street, north on University Avenue, west on Richmond Street West, south on Spadina Avenue, west on King Street and south on Dufferin Street to Dufferin Gates Loop. • Eastbound: originating from Dufferin Gates Loop, buses will travel north on Dufferin Street, east on King Street, north on Spadina Avenue, east on Adelaide Street West, south on University Avenue and east on King Street to Parliament Street. 304 King Streetcar Night Service will divert as follows: • Westbound: from King Street, north on York Street, west on Queen Street, south on Spadina Avenue, west on King Street to regular route. -
Relief Line South Environmental Project Report, Executive Summary
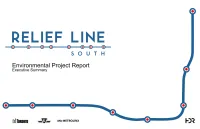
Relief Line South Environmental Project Report Executive Summary ES Figure 1: Relief Line South Alignment and Station Introduction and Background (Section 1) Providing additional rapid transit capacity into and within the downtown Toronto area has long been an objective for the City of Toronto. Existing transit services are reaching or exceeding their practical capacity during peak periods. Significant inbound transit capacity deficiencies exist during the morning peak period, particularly on Line 1 (Yonge) south of Bloor and at the Bloor- Yonge interchange, and several GO rail lines, but also on streetcar routes east and west of downtown. With continued growth projected for the City of Toronto and the Greater Toronto and Hamilton Area (GTHA), there is an urgent need for improvements. A number of potential infrastructure, operational, and policy improvements to provide additional transit capacity into and within downtown Toronto have been considered; however, these measures will not on their own be sufficient to address capacity issues during peak periods into the future. As such, there exists a need to examine additional opportunities to enhance rapid transit, particularly into the downtown area. In response to these issues, and the concern that the planned Yonge North Subway Extension (YNSE) into York Region would exacerbate crowding on the Yonge Subway line, in 2009 Toronto City Council approved a series of motions requesting that Metrolinx prioritize a Relief Line within its 15-year plan; that Metrolinx prioritize the Relief Line in advance of the YNSE; and that the Toronto Transit Commission (TTC) commence studies to evaluate the merits of the Relief Line. The Downtown Rapid Transit Expansion Study (DRTES) – Phase 1 Strategic Plan, completed and adopted in October 2012, found that while policy actions could aid in improving downtown transportation issues, it was clear that a Relief Line was required to address Downtown Toronto’s transit needs in the future. -

Coordinated Transit Consultation Meetings Smarttrack, GO RER, Relief Line, Scarborough Subway Extension June 13, 2015 Highlights Report
Coordinated Transit Consultation Meetings SmartTrack, GO RER, Relief Line, Scarborough Subway Extension June 13, 2015 Highlights Report This concise Highlights Report has been prepared to provide the City of Toronto, TTC and Metrolinx with a snapshot of the feedback captured at the public meeting held on June 13, 2015. A more detailed report of the feedback captured during this phase of consultations will be prepared in the coming days. Introduction On Saturday, June 13, 2015, the City of Toronto, City Planning Division (Transportation Planning), the TTC and Metrolinx, hosted a public meeting on four key transit projects currently being planned. The meeting was held at Burnhamthorpe Collegiate , 500 The East Mall, Toronto. The purpose of the public meeting varied by project: SmartTrack: Introduce the SmartTrack concept and study process for the Eglinton West Corridor Feasibility Study, and gather feedback on three conceptual alignments being studied in the Feasibility Study GO Regional Express Rail (RER): Introduce the GO RER program in Toronto Relief Line: Collect feedback on the results of potential station area evaluation and potential corridors Scarborough Subway Extension: Collect feedback on preliminary analysis of potential corridors and potential alignments and station concepts The meeting featured a series of panels and interactive feedback activities on each project. Participants could freely move between display panels and activities at their own pace, and speak with project staff from the City, TTC and Metrolinx. At 10:20 a.m, an introductory presentation on coordinated network transit planning, with a focus on SmartTrack – Eglinton West Corridor, was given by Tim Läspä, Director, Transportation Planning, City Planning Division. -

September 2018
Toronto Transit Commission CEO’s Report September 2018 TTC performance scorecard 2 CEO’s commentary and 6 current issues Critical paths 9 Performance Updates: Safety & Security 15 Customer 19 People 48 Assets 52 Toronto Transit Commission CEO’s Report September 2018 TTC performance scorecard Current Ongoing Key Performance Indicator Description Latest Measure Current Target Page Status Trend Safety and Security Lost Time Injuries Injuries per 100 Employees July 2018 5.05 4.49* 15 Customer Injury Incidents Injury Incidents per 1M Boardings July 2018 0.93 1.02* 17 Offences against Customers Offences per 1M Boardings July 2018 0.67 1.00 17 Offences against Staff Offences per 100 Employees July 2018 3.76 3.88* 18 Customer: Ridership TTC Ridership July 2018 39.1M 40.7M 19 TTC Ridership 2018 y-t-d to July 310.7M 320.7M NA 19 PRESTO Ridership July 2018 11.0M 13.7M 20 PRESTO Ridership 2018 y-t-d to July 76.9M 85.4M NA 20 Wheel-Trans Ridership July 2018 328K 368K 21 Wheel-Trans Ridership 2018 y-t-d to July 2,456K 2,803K NA 21 Ongoing trend indicators: Favourable Mixed Unfavourable * Represents current 12-month average of actual results 2 Toronto Transit Commission | CEO’s Report | September 2018 Current Ongoing Key Performance Indicator Description Latest Measure Current Target Page Status Trend Customer: Satisfaction Customer Satisfaction score Q2 2018 77% 82% 22 Customer: Environment Station Cleanliness Audit Score Q2 2018 77.5% 75% 23 Streetcar Cleanliness Audit Score Q2 2018 92.8% 90% 24 Bus Cleanliness Audit Score Q2 2018 92.0% 90% 25 Subway -

Don Valley Hills and Dales Discovery Walk
GETTING THERE AND BACK Explore the scenic hills and dales of the ❸NECROPOLIS (CEMETERY) You can reach the suggested starting point on public Don River Valley. Discover panoramic views,“Necropolis” means “city of the dead”. Visit the final resting- transit by taking the BLOOR/DANFORTH subway DISCOVERY WALKS place of many early pioneers and Toronto’s first mayor, to Broadview Station. The same subway line serves the an urban farm and the splendid park-likeWilliam Lyon Mackenzie. Enjoy the peaceful park-like two suggested tour end points, Broadview and atmosphere of Toronto’s oldest cemetery. grounds that include an impressive collection of trees. Castle Frank Stations. ❹ DONDON HE OUTE PRINCE EDWARD VIADUCT T R Enjoy the panoramic view of the river valley from the This Discovery Walk leads you on two Viaduct, one of Toronto’s most impressive human-made VALLEYVALLEY overlapping loops through the Don Valley structures, built across the Don Valley in and nearby neighbourhoods. Although you the late 1910s. The bridge’s lower HILLSHILLS && can begin this Discovery Walk at any deck was first used in the point along the route, a good starting 1960s when the point is the Broadview Subway Bloor/Danforth subway DALESDALES Station (see middle right side of was created. map). From the subway station, One In A Series of Self-Guided Walks the tour guides you through the Lower Don Valley. Along the way you can visit Riverdale Riverdale Park Farm, Prince Edward (Bloor Street) Viaduct, Chester FOR MORE INFO Springs Marsh and Todmorden For more information on Discovery Walks, including Mills. -

Route Period / Service Old New Old New Old New Old New Old New Old New Old New Old New Old New 1 Yonge-University-Spadina 501 Qu
Service Changes Effective Sunday, August 1, 2021 Route Period / Service M-F Saturday Sunday Headway R.T.T. Vehicles Headway R.T.T. Vehicles Headway R.T.T. Veh Old New Old New Old New Old New Old New Old New Old New Old New Old New Where running times are shown as "A+B", the first part is the scheduled driving time and the second part is the scheduled recovery/layover usually provided to round out the trip time as a multiple of the headway. Vehicle Types: F: Flexity B: Bus AB: Artic Bus T: Train Subway Service Change 1 Yonge-University-Spadina Sunday service will operate with one person train crews between Vaughan Centre and St. George Station. Two person crews will operate on the remainder of the line. King-Queen-Queensway-Roncesvalles Project 501 Queen The shift in routes at King-Queen-Queensway-Roncesvalles described here has been deferred because phase 1 of the work will not be completed as expected on July 21. Schedules and routes shown below will be implemented when the project reaches the state 501/301 Queen Rolling street closures will be in place between Bay and Fennings (east of Dovercourt) for water main, track and streetscape work effective the week of July 12. 501 buses will divert to parallel streets as needed. When the KQQR project shifts to phase 2, 501/301 buses will operate directly along Queen rather than diverting to King Street west of Dufferin. 504/304 King When the KQQR project shifts to phase 2, bus service on the west end of 504 King will be consolidated as one route between Dundas West Station and Princes Gate Loop. -

“Thanks for Bearing With
TORONTO MOVES: FOR ROUTES, SCHEDULES, FARES AND MORE, GO TO TTC.CA EMPLOYEE PROFILE “THANKS FOR BEARING WITH US” Name: Sue Patterson Position: Wheel-Trans SIGNAL UPGRADES, NEW CROSSOVERS WILL PAY DIVIDENDS Operator Years of Service: 12 ast weekend saw the largest-ever planned TTC subway closure when the Yonge-Uni- Lversity-Spadina (YUS) line was closed for Working for Wheel Trans is not like a job to me. It’s more of an op- two days south of Bloor St. to carry out continued portunity to help others have a brighter day. Many times I hear our signal system upgrade work. customers say that if it wasn’t for Wheel Trans, they would never Months of preparation and planning culminated get anywhere. Our customers are like friends to me. If I can help in the successful temporary disconnection of the them by bringing them places and putting a smile on their face, existing 60-year-old signals, then the installation then that makes my day. The Bible says to love one another as He and testing of new equipment. It was followed by first loved us, and that’s how I try to live each day at Wheel Trans. ANDY the reinstatement and testing of the existing system BYFORD in time for a trouble-free start to service on Mon- CEO day morning. PAPE STATION CLOSED – AUG. 19-30 This is just one phase in the complete renewal of TORONTO Pape Station will be closed for 12 days, from Mon., Aug. 19, TRANSIT the original signal system along the entire YUS to Fri., Aug. -
Letter-From-K-Bousfield-Re-Use-Of-CP-Line-In-The-Don-Valley-With-MX-Response.Pdf
Subject: FW: Metrolinx Board Meeting - June 27, 2019 - Fwd: Our upcoming Metrolinx Regional Reference Panel is Saturday June 22 From: ken.bousfield ken.bousfield Sent: June-26-19 10:46 AM To: CEO (Metrolinx) Cc: Chair of Metrolinx; Angela Gibson Subject: Re: Metrolinx Board Meeting - June 27, 2019 - Fwd: Our upcoming Metrolinx Regional Reference Panel is Saturday June 22 Phil Verster, CEO, Metrolinx 97 Front Street West, Toronto, Ontario, M5J 1E6 Dear Mr. Verster: Re: Metrolinx Board Meeting - June 27, 2019 - Public Session - 12:30 p.m. to 2:00 p.m. Please see the correspondence below. For more than a decade I have wondered why no use is being made of the former CP lines in the Don Valley. It seems to me that they could be used in many different ways that would substantially enhance transit service, fairly quickly and at relatively low cost. The PDF shows some options. There are undoubtedly many more. The PDF is very large. Therefore, I will send it by a following e-mail. If it does not arrive, it is only a very short walk to provide a paper copy. In any case, I understand that Angela Gibson, Manager of Regional Partnerships at Metrolinx, already a copy of the PDF. The PDF should be self-explanatory. It takes about 20 minutes as a presentation. I am not sure that this merits the time of the entire Board. An explanation would be very welcome, nonetheless. Please confirm safe receipt of this e-mail and of its enclosure by following e-mail. Yours, Ken Bousfield 1 Subject: FW: FW: Our upcoming Metrolinx Regional Reference Panel is Saturday June 22 Attachments: ATT00001.rtf; Metrolinx - 2019 June 22 - YRLNS.pdf From: ken.bousfield ken.bousfield Sent: June-26-19 10:52 AM To: CEO (Metrolinx) Cc: Chair of Metrolinx; Angela Gibson Subject: Fwd: FW: Our upcoming Metrolinx Regional Reference Panel is Saturday June 22 Phil Verster, CEO, Metrolinx 97 Front Street West, Toronto, Ontario, M5J 1E6 Dear Mr.