Optimization Models for Underway Replenishment of a Dispersed Carrier Battle Group
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
China's Logistics Capabilities for Expeditionary Operations
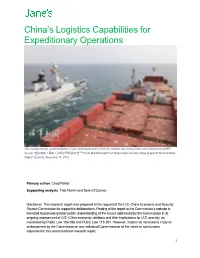
China’s Logistics Capabilities for Expeditionary Operations The modular transfer system between a Type 054A frigate and a COSCO container ship during China’s first military-civil UNREP. Source: “重大突破!民船为海军水面舰艇实施干货补给 [Breakthrough! Civil Ships Implement Dry Cargo Supply for Naval Surface Ships],” Guancha, November 15, 2019 Primary author: Chad Peltier Supporting analysts: Tate Nurkin and Sean O’Connor Disclaimer: This research report was prepared at the request of the U.S.-China Economic and Security Review Commission to support its deliberations. Posting of the report to the Commission's website is intended to promote greater public understanding of the issues addressed by the Commission in its ongoing assessment of U.S.-China economic relations and their implications for U.S. security, as mandated by Public Law 106-398 and Public Law 113-291. However, it does not necessarily imply an endorsement by the Commission or any individual Commissioner of the views or conclusions expressed in this commissioned research report. 1 Contents Abbreviations .......................................................................................................................................................... 3 Executive Summary ............................................................................................................................................... 4 Methodology, Scope, and Study Limitations ........................................................................................................ 6 1. China’s Expeditionary Operations -

Deck Runoff NOD, Phase I Uniform National Discharge Standards For
This document is part of Appendix A, Deck Runoff: Nature of Discharge for the “Phase I Final Rule and Technical Development Document of Uniform National Discharge Standards (UNDS),” published in April 1999. The reference number is EPA-842-R-99-001. Phase I Final Rule and Technical Development Document of Uniform National Discharge Standards (UNDS) Appendix A Deck Runoff: Nature of Discharge April 1999 NATURE OF DISCHARGE REPORT Deck Runoff 1.0 INTRODUCTION The National Defense Authorization Act of 1996 amended Section 312 of the Federal Water Pollution Control Act (also known as the Clean Water Act (CWA)) to require that the Secretary of Defense and the Administrator of the Environmental Protection Agency (EPA) develop uniform national discharge standards (UNDS) for vessels of the Armed Forces for “...discharges, other than sewage, incidental to normal operation of a vessel of the Armed Forces, ...” [Section 312(n)(1)]. UNDS is being developed in three phases. The first phase (which this report supports), will determine which discharges will be required to be controlled by marine pollution control devices (MPCDs)—either equipment or management practices. The second phase will develop MPCD performance standards. The final phase will determine the design, construction, installation, and use of MPCDs. A nature of discharge (NOD) report has been prepared for each of the discharges that has been identified as a candidate for regulation under UNDS. The NOD reports were developed based on information obtained from the technical community within the Navy and other branches of the Armed Forces with vessels potentially subject to UNDS, from information available in existing technical reports and documentation, and, when required, from data obtained from discharge samples that were collected under the UNDS program. -

What Do Aoes Do When They Are Deployed? Center for Naval Analyses
CAB D0000255.A1 / Final May 2000 What Do AOEs Do When They Are Deployed? Burnham C. McCaffree, Jr. • Jay C. Poret Center for Naval Analyses 4401 Ford Avenue • Alexandria, Virginia 22302-1498 Copyright CNA Corporation/Scanned October 2002 Approved for distribution: May 2000 ,*&. KW^f s£^ ••—H. Dwight Lydtis, Jr.rDfffector USMC & Expeditionary Systems Team Acquisition, Technology & Systems Analysis Division This document represents the best opinion of CNA at the time of issue. It does not necessarily represent the opinion of the Department of the Navy. APPROVED FOR PUBLIC RELEASE; DISTRIBUTION UNLIMITED For copies of this document, call the CNA Document Control and Distribution Section (703) 824-2130 Copyright © 2000 The CNA Corporation What Do AOEs Do When They Are Deployed? The Navy has twelve aircraft carriers and eight fast combat support ships (AOEs) that were built to act as carrier battle group (CVBG) station ships. The multi-product AOE serves as a "warehouse" for fuel, ammunition, spare parts, provisions, and stores to other CVBG ships, especially the carrier. Currently, an AOE deploys with about four out of every five CVBGs on peacetime forward deployments. Prior to 1996, when there were only four AOEs, only two of every five CVBGs deployed with an AOE. That frequency could resume in the latter part of this decade when AOE-1 class ships are retired at the end of their 35-year service life. The combat logistics force (CLF) that supports forward deployed combatant ships consists of CVBG station ships and shuttle ships (oilers, ammunition ships, and combat stores ships) that resupply the station ships and the combatants as well. -
Navy Littoral Combat Ship (LCS) Program: Background and Issues for Congress
Navy Littoral Combat Ship (LCS) Program: Background and Issues for Congress Ronald O'Rourke Specialist in Naval Affairs July 22, 2013 Congressional Research Service 7-5700 www.crs.gov RL33741 CRS Report for Congress Prepared for Members and Committees of Congress Navy Littoral Combat Ship (LCS) Program: Background and Issues for Congress Summary The Littoral Combat Ship (LCS) is a relatively inexpensive Navy surface combatant equipped with modular “plug-and-fight” mission packages for countering mines, small boats, and diesel- electric submarines, particularly in littoral (i.e., near-shore) waters. Navy plans call for fielding a total force of 52 LCSs. Twelve LCSs were funded from FY2005 through FY2012. Another four (LCSs 13 through 16) were funded in FY2013, although funding for those four ships has been reduced by the March 1, 2013, sequester on FY2013 funding. The Navy’s proposed FY2014 budget requests $1,793.0 million for four more LCSs (LCSs 17 through 20), or an average of about $448 million per ship. Two very different LCS designs are being built. One was developed by an industry team led by Lockheed; the other was developed by an industry team that was led by General Dynamics. The Lockheed design is built at the Marinette Marine shipyard at Marinette, WI; the General Dynamics design is built at the Austal USA shipyard at Mobile, AL. LCSs 1, 3, 5, and so on are Marinette Marine-built ships; LCSs 2, 4, 6, and so on are Austal-built ships. The 20 LCSs procured or scheduled for procurement in FY2010-FY2015 (LCSs 5 through 24) are being procured under a pair of 10-ship, fixed-price incentive (FPI) block buy contracts that the Navy awarded to Lockheed and Austal USA on December 29, 2010. -
Littoral Combat Ship an Examination of Its Possible Concepts of Operation
Center for Strategi C and Budgetary a S S e ssm e n t S Littoral Combat Ship An Examination of its Possible Concepts of Operation By Martin n. Murphy littoral combat ship: an examination of its possible concepts of operation By Martin N. Murphy 2010 © 2010 Center for Strategic and Budgetary Assessments. All rights reserved. about the center for strategic and budgetary assessments The Center for Strategic and Budgetary Assessments (CSBA) is an independent, nonpartisan policy research institute established to promote innovative thinking and debate about national security strategy and investment options. CSBA’s goal is to enable policymakers to make informed decisions on matters of strategy, security policy and resource allocation. CSBA provides timely, impartial and insightful analyses to senior decision mak- ers in the executive and legislative branches, as well as to the media and the broader national security community. CSBA encourages thoughtful participation in the de- velopment of national security strategy and policy, and in the allocation of scarce human and capital resources. CSBA’s analysis and outreach focus on key questions related to existing and emerging threats to US national security. Meeting these challenges will require transforming the national security establishment, and we are devoted to helping achieve this end. about the author Dr. Martin Murphy joined CSBA in fall 2008 bringing with him a research focus on naval warfare, maritime irregular warfare, mari- time security, piracy and transnational criminal threats. He is the author of Small Boats, Weak States, Dirty Money, a major study of criminal and political disorder at sea published by Columbia University Press in Spring 2009, and Contemporary Piracy and Maritime Terrorism, an Adelphi Paper published by the London- based International Institute for Strategic Studies (IISS) in 2007. -

Naval Accidents 1945-1988, Neptune Papers No. 3
-- Neptune Papers -- Neptune Paper No. 3: Naval Accidents 1945 - 1988 by William M. Arkin and Joshua Handler Greenpeace/Institute for Policy Studies Washington, D.C. June 1989 Neptune Paper No. 3: Naval Accidents 1945-1988 Table of Contents Introduction ................................................................................................................................... 1 Overview ........................................................................................................................................ 2 Nuclear Weapons Accidents......................................................................................................... 3 Nuclear Reactor Accidents ........................................................................................................... 7 Submarine Accidents .................................................................................................................... 9 Dangers of Routine Naval Operations....................................................................................... 12 Chronology of Naval Accidents: 1945 - 1988........................................................................... 16 Appendix A: Sources and Acknowledgements........................................................................ 73 Appendix B: U.S. Ship Type Abbreviations ............................................................................ 76 Table 1: Number of Ships by Type Involved in Accidents, 1945 - 1988................................ 78 Table 2: Naval Accidents by Type -
Atp-01, Volume Ii Allied Maritime Tactical Signal and Maneuvering Book
NATO UNCLASSIFIED ATP-01, Vol. II NATO STANDARD ATP-01, VOLUME II ALLIED MARITIME TACTICAL SIGNAL AND MANEUVERING BOOK Edition (G) Version (1) JANUARY 2016 NORTH ATLANTIC TREATY ORGANIZATION ALLIED TACTICAL PUBLICATION Published by the NATO STANDARDIZATION OFFICE (NSO) © NATO/OTAN MAY BE CARRIED IN MILITARY AIRCRAFT 0410LP1158006 I EDITION (G) VERSION (1) NATO UNCLASSIFIED NATO UNCLASSIFIED ATP-01, Vol. II ALPHABETICAL AND NUMERAL FLAGS FLAG FLAG FLAG and Spoken Writtenand Spoken Writtenand Spoken Written NAME NAME NAME MIKE ALFA A M YANKEE Y A M Y NOVEMBER BRAVO B N ZULU Z B N Z C OSCAR O 1 CHARLIE ONE C O ONE DELTAD PAPA P TWO 2 D P TWO ECHOE QUEBEC Q THREE 3 E Q THREE FOXTROTF ROMEO R FOUR 4 F R FOUR GOLFG SIERRA S FIVE 5 G S FIVE 6 HOTELH TANGO T SIX H T SIX 7 INDIAI UNIFORM U SEVEN I U SEVEN JULIETTJ VICTOR V EIGHT 8 J V EIGHT KILOK WHISKEY W NINE 9 K W NINE LIMAL XRAY X ZERO 0 L X ZERO II EDITION (G) VERSION (1) NATO UNCLASSIFIED NATO UNCLASSIFIED ATP-01, Vol. II January 2016 PUBLICATION NOTICE 1. ATP-01(G)(1), Volume II, ALLIED MARITIME TACTICAL SIGNAL AND MANEUVERING BOOK, is effective upon receipt. It supersedes ATP-01(F)(1), Volume II. 2. Summary of changes: a. Chapter 1: Updates chapter with information from MTP-01(F)(1). b. Figures 1-5, 1-6, and 1-7 updated to refl ect information from MTP-01(F)(1). c. Chapter 2: Updates Signal Flags and Pennants table. -

Introduction by 2035, What Is the PLA's Force Projection Capability
Testimony before the U.S.-China Economic and Security Review Commission Hearing on China’s Military Power Projection and U.S. National Interests 20 February 2020 By Chad Peltier, Senior Analyst-Consulting, Jane’s Introduction Co-Chairs Wortzel and Fiedler, and all commissioners, thank you very much for the opportunity to testify today on China’s evolving expeditionary capabilities. This is an important topic with deep ramifications for U.S. force posture, procurement and research & development investment decisions, and diplomatic relations both with China and our allies. It is also an area of rapid change. The People’s Liberation Army Navy (PLAN) is introducing new primary surface combatants and amphibious assault ships, the PLAN Marine Corps (PLANMC) has tripled in size, the PLA Air Force (PLAAF) is rapidly producing strategic airlift assets, and China established its first permanent overseas military base in Djibouti. Further, this list of achievements does not include either China’s civilian and dual-use assets that may be mobilized for power projection or vast research into emerging technologies, such as artificial intelligence, electromagnetic capabilities, and directed energy weapons. I have been asked to focus my testimony on the “nuts and bolts” of China’s expeditionary capabilities. I will structure my comments to answer the following questions: By 2035, what is the PLA’s force projection capability likely to encompass? How quickly can China deploy forces overseas? At what distance from its littoral waters can forces operate? -

Battleship IOWA Official Crew Handbook
Official Battleship IOWA Crew Handbook One Ship ©BattleshipIOWA One Crew ©BattleshipIOWA Official Battleship IOWA Crew Handbook ©BattleshipIOWA Second Edition © Pacific Battleship Center, 2013 250 South Harbor Blvd. San Pedro, CA 90731 Revision 2.5, April 28, 2017 Acknowledgements Adapted from Battleship IOWA Training Manual, Rev. 0, an unpublished manuscript compiled in 2012 by David Way, Curator of Battleship IOWA. The Handbook was de- veloped in 2013 by the IOWA’s Training Department for the ship’s Crew Training Program and continues to be expanded as more information becomes available. Researched, written and edited by: Researchers Rich Abele, Bob Maronde, Steve Nelson, Hal Puritz, Jon Reed, Ron Rishagen Editors Managing Editor: Bob Maronde Contributing Editors: David Canfield; Mike Getscher; Barry Herlihy; David Way Layout and Design Bob Maronde Graphics Linda Ayers, Bob Maronde Publisher ©BattleshipBattleship IOWA TrainingIOWA Department Photo and Graphic Credits Battleship IOWA Training Team, James Pobog, US Navy, Images in the public domain. We gratefully acknowledge the continuing encouragement, assistance and support of the Battleship IOWA crew and the USS Midway Museum staff and volunteers. iv Rev. 2.5 Contents Preface ..............................................................................................1 Welcome aboard Battleship IOWA! .......................................2 San Pedro ........................................................................................4 US Naval History - Battleships ..................................................6 -

ISSUES and OPTIONS for the NAVY's COMBAT LOGISTICS FORCE the Congress of the United States Congressional Budget Office
ISSUES AND OPTIONS FOR THE NAVY'S COMBAT LOGISTICS FORCE The Congress of the United States Congressional Budget Office NOTES All years referred to in this report are fiscal years unless otherwise indicated. All costs are expressed in fiscal year 1989 dollars of budget authority, using the Administration's February 1988 econom- ic assumptions, unless otherwise noted. PREFACE The Navy's combat ships are resupplied regularly at sea by the ships of the Combat Logistics Force (CLF). To date, the Administration has requested, and the Congress has funded, an inventory of about 59 CLF ships, six ships short of the Navy's goal of 65. If all CLF ships in the Administration's most recent shipbuilding plan, which covers 1989 to 1992, are authorized by the Congress as proposed, then the Navy would field 64 CLF ships, only one ship short of its goal. However, the Adminis- tration is currently reviewing its shipbuilding plans to accommodate reduced defense spending, and, if history is a guide, authorization of some of the CLF ships in the current plan could be postponed beyond 1992. If this postponement occurs, shortages of CLF ships may persist. In a future war, these shortages could be criti- cal, forcing the Navy to adjust tactics or the deployment of ships to accommodate deficiencies in logistics support. This analysis by the Congressional Budget Office (CBO) addresses the Navy's inventory goals for the CLF and the effect that the Administration's shipbuilding plans will have on meeting those goals. The report also discusses alternative strategies for the procurement of CLF ships over the next four years. -

Fleet Design with Chinese Characteristics
Fleet Design with Chinese Characteristics 1 James R. Holmes0F J. C. Wylie Chair of Maritime Strategy Naval War College February 15, 2018 China’s national fleet is a composite of navy, coast guard, and maritime law-enforcement shipping. These official components of the fleet operate in conjunction with merchantmen that double as minelayers or intelligence-gathering assets, and with a maritime militia embedded within the fishing fleet. If it floats, it is probably an element of Chinese sea power—official or unofficial. The composition of China’s fleet betokens a holistic understanding of what constitutes sea power. Any implement that can shape events at sea could be part of it, whether it be military or non-military, governmental or non-governmental in nature. Such a fleet furnishes Beijing options throughout the spectrum of peacetime and wartime competition. It also introduces asymmetries into U.S.-China encounters in the marine commons. U.S. naval commanders must accustom themselves to the reality that they confront an assortment of platforms that Chinese commanders can combine and recombine depending on the mission. A Usable Way of Maritime War Like past aspirants to great sea power, China has consulted sources both domestic and foreign to inform its maritime rise. Steeped in China’s sparse maritime tradition, its weakness during the post-World War II years, the legacy of Mao Zedong’s guerrilla-warfare strategy, and the influence of Soviet naval doctrine, 2 the PLA Navy embraced a minimalist posture from its founding.1F For decades China’s navy remained a minor player against foreign invasion. -

Historic American Engineering Record
HISTORIC AMERICAN ENGINEERING RECORD U.S. NAVY OILERS AND TANKERS HAER No. DC-62 Location: Various; U.S. Maritime Administration, Washington, DC Significance: Accompanying the U.S. Navy’s warships are logistical vessels, like the oilers and tankers that provide the supplies needed to conduct operations in times of peace and war. The oilers and tankers, as well as the underway replenishment techniques used, have transformed through time to keep a range of battle groups and expeditionary forces supplied while underway for extended periods. In so doing, these vessels add to the security of the United States and its ability to respond to crises anywhere in the world. Historian: Brian Clayton, HAER Contract Historian, 2009 Project Information: This project is part of the Historic American Engineering Record (HAER), a long-range program to document historically significant engineering and industrial works in the United States. The Heritage Documentation Programs of the National Park Service, U.S. Department of the Interior, administers the HAER program. This overview report was prepared under the direction of Todd Croteau (HAER Maritime Program Coordinator). Special thanks go to Erhard Koehler (U.S. Maritime Administration) whose help and assistance greatly benefitted this project. For individual tanker and fleet oiler histories, see the following: Mispillion (Fleet oiler, T3-S2-A3) HAER No. CA-338 Mission Santa Ynez (Tanker, T2-SE-A2) HAER No. CA-337 Saugatuck (Tanker, T2-SE-A1) HAER No. VA-128 Taluga (Fleet oiler, T3-S2-A1) HAER No. CA-336 Wichita (AOR) HAER No. CA-356 U.S. NAVY OILERS AND TANKERS HAER No.