Zernike Polynomials Background
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Quaternion Zernike Spherical Polynomials
MATHEMATICS OF COMPUTATION Volume 84, Number 293, May 2015, Pages 1317–1337 S 0025-5718(2014)02888-3 Article electronically published on August 29, 2014 QUATERNION ZERNIKE SPHERICAL POLYNOMIALS J. MORAIS AND I. CAC¸ AO˜ Abstract. Over the past few years considerable attention has been given to the role played by the Zernike polynomials (ZPs) in many different fields of geometrical optics, optical engineering, and astronomy. The ZPs and their applications to corneal surface modeling played a key role in this develop- ment. These polynomials are a complete set of orthogonal functions over the unit circle and are commonly used to describe balanced aberrations. In the present paper we introduce the Zernike spherical polynomials within quater- nionic analysis ((R)QZSPs), which refine and extend the Zernike moments (defined through their polynomial counterparts). In particular, the underlying functions are of three real variables and take on either values in the reduced and full quaternions (identified, respectively, with R3 and R4). (R)QZSPs are orthonormal in the unit ball. The representation of these functions in terms of spherical monogenics over the unit sphere are explicitly given, from which several recurrence formulae for fast computer implementations can be derived. A summary of their fundamental properties and a further second or- der homogeneous differential equation are also discussed. As an application, we provide the reader with plot simulations that demonstrate the effectiveness of our approach. (R)QZSPs are new in literature and have some consequences that are now under investigation. 1. Introduction 1.1. The Zernike spherical polynomials. The complex Zernike polynomials (ZPs) have long been successfully used in many different fields of optics. -

De Nobelprijzen Komen Eraan!
De Nobelprijzen komen eraan! De Nobelprijzen komen eraan! In de loop van volgende week worden de Nobelprijswinnaars van dit jaar aangekondigd. Daarna weten we wie in december deze felbegeerde prijzen in ontvangst mogen gaan nemen. De Nobelprijzen zijn wellicht de meest prestigieuze en bekende academische onderscheidingen ter wereld, maar waarom eigenlijk? Hoe zijn de prijzen ontstaan, en wie was hun grondlegger, Alfred Nobel? Afbeelding 1. Alfred Nobel.Alfred Nobel (1833-1896) was de grondlegger van de Nobelprijzen. Volgende week is de jaarlijkse aankondiging van de prijswinnaard. Alfred Nobel Alfred Nobel was een belangrijke negentiende-eeuwse Zweedse scheikundige en uitvinder. Hij werd geboren in Stockholm in 1833 in een gezin met acht kinderen. Zijn vader, Immanuel Nobel, was een werktuigkundige en uitvinder die succesvol was met het maken van wapens en stoommotoren. Immanuel wou dat zijn zonen zijn bedrijf zouden overnemen en stuurde Alfred daarom op een twee jaar durende reis naar onder andere Duitsland, Frankrijk en de Verenigde Staten, om te leren over chemische werktuigbouwkunde. In Parijs ontmoette bron: https://www.quantumuniverse.nl/de-nobelprijzen-komen-eraan Pagina 1 van 5 De Nobelprijzen komen eraan! Alfred de Italiaanse scheikundige Ascanio Sobrero, die drie jaar eerder het explosief nitroglycerine had ontdekt. Nitroglycerine had een veel grotere explosieve kracht dan het buskruit, maar was ook veel gevaarlijker om te gebruiken omdat het instabiel is. Alfred raakte geinteresseerd in nitroglycerine en hoe het gebruikt kon worden voor commerciele doeleinden, en ging daarom werken aan de stabiliteit en veiligheid van de stof. Een makkelijk project was dit niet, en meerdere malen ging het flink mis. -

Appendix E • Nobel Prizes
Appendix E • Nobel Prizes All Nobel Prizes in physics are listed (and marked with a P), as well as relevant Nobel Prizes in Chemistry (C). The key dates for some of the scientific work are supplied; they often antedate the prize considerably. 1901 (P) Wilhelm Roentgen for discovering x-rays (1895). 1902 (P) Hendrik A. Lorentz for predicting the Zeeman effect and Pieter Zeeman for discovering the Zeeman effect, the splitting of spectral lines in magnetic fields. 1903 (P) Antoine-Henri Becquerel for discovering radioactivity (1896) and Pierre and Marie Curie for studying radioactivity. 1904 (P) Lord Rayleigh for studying the density of gases and discovering argon. (C) William Ramsay for discovering the inert gas elements helium, neon, xenon, and krypton, and placing them in the periodic table. 1905 (P) Philipp Lenard for studying cathode rays, electrons (1898–1899). 1906 (P) J. J. Thomson for studying electrical discharge through gases and discover- ing the electron (1897). 1907 (P) Albert A. Michelson for inventing optical instruments and measuring the speed of light (1880s). 1908 (P) Gabriel Lippmann for making the first color photographic plate, using inter- ference methods (1891). (C) Ernest Rutherford for discovering that atoms can be broken apart by alpha rays and for studying radioactivity. 1909 (P) Guglielmo Marconi and Carl Ferdinand Braun for developing wireless telegraphy. 1910 (P) Johannes D. van der Waals for studying the equation of state for gases and liquids (1881). 1911 (P) Wilhelm Wien for discovering Wien’s law giving the peak of a blackbody spectrum (1893). (C) Marie Curie for discovering radium and polonium (1898) and isolating radium. -

Wavefront Parameters Recovering by Using Point Spread Function
Wavefront Parameters Recovering by Using Point Spread Function Olga Kalinkina[0000-0002-2522-8496], Tatyana Ivanova[0000-0001-8564-243X] and Julia Kushtyseva[0000-0003-1101-6641] ITMO University, 197101 Kronverksky pr. 49, bldg. A, Saint-Petersburg, Russia [email protected], [email protected], [email protected] Abstract. At various stages of the life cycle of optical systems, one of the most important tasks is quality of optical system elements assembly and alignment control. The different wavefront reconstruction algorithms have already proven themselves to be excellent assistants in this. Every year increasing technical ca- pacities opens access to the new algorithms and the possibilities of their appli- cation. The paper considers an iterative algorithm for recovering the wavefront parameters. The parameters of the wavefront are the Zernike polynomials coef- ficients. The method involves using a previously known point spread function to recover Zernike polynomials coefficients. This work is devoted to the re- search of the defocusing influence on the convergence of the algorithm. The method is designed to control the manufacturing quality of optical systems by point image. A substantial part of the optical systems can use this method with- out additional equipment. It can help automate the controlled optical system ad- justment process. Keywords: Point Spread Function, Wavefront, Zernike Polynomials, Optimiza- tion, Aberrations. 1 Introduction At the stage of manufacturing optical systems, one of the most important tasks is quality of optical system elements assembly and alignment control. There are various methods for solving this problem, for example, interference methods. However, in some cases, one of which is the alignment of the telescope during its operation, other control methods are required [1, 2], for example control by point image (point spread function) or the image of another known object. -
Wavefront Aberrations
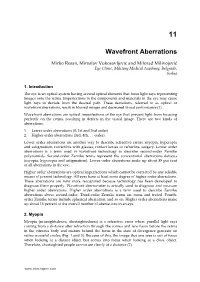
11 Wavefront Aberrations Mirko Resan, Miroslav Vukosavljević and Milorad Milivojević Eye Clinic, Military Medical Academy, Belgrade, Serbia 1. Introduction The eye is an optical system having several optical elements that focus light rays representing images onto the retina. Imperfections in the components and materials in the eye may cause light rays to deviate from the desired path. These deviations, referred to as optical or wavefront aberrations, result in blurred images and decreased visual performance (1). Wavefront aberrations are optical imperfections of the eye that prevent light from focusing perfectly on the retina, resulting in defects in the visual image. There are two kinds of aberrations: 1. Lower order aberrations (0, 1st and 2nd order) 2. Higher order aberrations (3rd, 4th, … order) Lower order aberrations are another way to describe refractive errors: myopia, hyperopia and astigmatism, correctible with glasses, contact lenses or refractive surgery. Lower order aberrations is a term used in wavefront technology to describe second-order Zernike polynomials. Second-order Zernike terms represent the conventional aberrations defocus (myopia, hyperopia and astigmatism). Lower order aberrations make up about 85 per cent of all aberrations in the eye. Higher order aberrations are optical imperfections which cannot be corrected by any reliable means of present technology. All eyes have at least some degree of higher order aberrations. These aberrations are now more recognized because technology has been developed to diagnose them properly. Wavefront aberrometer is actually used to diagnose and measure higher order aberrations. Higher order aberrations is a term used to describe Zernike aberrations above second-order. Third-order Zernike terms are coma and trefoil. -

Zernike Polynomials: a Guide
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/241585467 Zernike polynomials: A guide Article in Journal of Modern Optics · April 2011 DOI: 10.1080/09500340.2011.633763 CITATIONS READS 41 12,492 2 authors: Vasudevan Lakshminarayanan Andre Fleck University of Waterloo Grand River Hospital 399 PUBLICATIONS 1,806 CITATIONS 40 PUBLICATIONS 1,210 CITATIONS SEE PROFILE SEE PROFILE Some of the authors of this publication are also working on these related projects: Theoretical and bench color and optics work View project Quantum Relational Databases View project All content following this page was uploaded by Vasudevan Lakshminarayanan on 13 May 2014. The user has requested enhancement of the downloaded file. Journal of Modern Optics Vol. 58, No. 7, 10 April 2011, 545–561 TUTORIAL REVIEW Zernike polynomials: a guide Vasudevan Lakshminarayanana,b*y and Andre Flecka,c aSchool of Optometry, University of Waterloo, Waterloo, Ontario, Canada; bMichigan Center for Theoretical Physics, University of Michigan, Ann Arbor, MI, USA; cGrand River Hospital, Kitchener, Ontario, Canada (Received 5 October 2010; final version received 9 January 2011) In this paper we review a special set of orthonormal functions, namely Zernike polynomials which are widely used in representing the aberrations of optical systems. We give the recurrence relations, relationship to other special functions, as well as scaling and other properties of these important polynomials. Mathematica code for certain operations are given in the Appendix. Keywords: optical aberrations; Zernike polynomials; special functions; aberrometry 1. Introduction the Zernikes will not be orthogonal over a discrete set The Zernike polynomials are a sequence of polyno- of points within a unit circle [11]. -

Carl Zeiss Meditec AG As a Result of Different Consolidation Models
ZEISS Medical Technology Company Presentation Insights 2017/2018 Content ZEISS Medical Technology 1 The ZEISS Group 2 ZEISS Medical Technology at a glance 3 Fascinating Facts 4 Product Portfolio 5 Solution Provider 6 Global MEGS Trends 7 Corporate Social Responsibility Company Presentation – ZEISS Medical Technology Insights ZEISS Medical Technology The ZEISS Group Company Presentation – ZEISS Medical Technology The Power of ZEISS 170 years of company history in Innovations 1st Picture 9,100 Stars of the surface of the Moon can be projected in planetariums taken with lenses from ZEISS using ZEISS optics Every second 3 Technical Oscars two people decide for helping leading movie-makers to purchase eyeglass capture perfect moments on film lenses from ZEISS 15 million 35 Nobel cataract operations prize-winners are performed annually put their trust in ZEISS around the world using microscopes to see more surgical systems from ZEISS Company Presentation – ZEISS Medical Technology ZEISS The company founders Carl Zeiss Ernst Abbe Their mission . Cutting-edge research . Extreme precision and maximum quality . Responsibility to society Company Presentation – ZEISS Medical Technology ZEISS Company history Carl Zeiss First non-German subsidiary Stock corporation opens a workshop in London marks the start ZEISS is transformed into a for precision engineering of global expansion stock corporation – the Carl and optics in Jena Zeiss Foundation remains the sole stockholder Carl Zeiss Partition Foundation Jena: expropriated Oberkochen: new factory created -

New Separated Polynomial Solutions to the Zernike System on the Unit Disk and Interbasis Expansion
1844 Vol. 34, No. 10 / October 2017 / Journal of the Optical Society of America A Research Article New separated polynomial solutions to the Zernike system on the unit disk and interbasis expansion 1,2,3 4, 1 GEORGE S. POGOSYAN, KURT BERNARDO WOLF, * AND ALEXANDER YAKHNO 1Departamento de Matemáticas, Centro Universitario de Ciencias Exactas e Ingenierías, Universidad de Guadalajara, Guadalajara, Jalisco, Mexico 2Yerevan State University, Yerevan, Armenia 3Joint Institute for Nuclear Research, Dubna, Russia 4Instituto de Ciencias Físicas, Universidad Nacional Autónoma de México, Av. Universidad s/n, Cuernavaca, Morelos 62251, Mexico *Corresponding author: [email protected] Received 23 May 2017; revised 7 August 2017; accepted 22 August 2017; posted 23 August 2017 (Doc. ID 296673); published 19 September 2017 The differential equation proposed by Frits Zernike to obtain a basis of polynomial orthogonal solutions on the unit disk to classify wavefront aberrations in circular pupils is shown to have a set of new orthonormal solution bases involving Legendre and Gegenbauer polynomials in nonorthogonal coordinates, close to Cartesian ones. We find the overlaps between the original Zernike basis and a representative of the new set, which turn out to be Clebsch–Gordan coefficients. © 2017 Optical Society of America OCIS codes: (000.3860) Mathematical methods in physics; (050.1220) Apertures; (050.5080) Phase shift; (080.1010) Aberrations (global); (350.7420) Waves. https://doi.org/10.1364/JOSAA.34.001844 1. INTRODUCTION: THE ZERNIKE SYSTEM to explain the symmetry hidden in the equal spacing of n familiar from the oscillator model. In 1934, Frits Zernike published a paper that gave rise to phase- ’ contrast microscopy [1]. -
Nobel Laureates with Their Contribution in Biomedical Engineering
NOBEL LAUREATES WITH THEIR CONTRIBUTION IN BIOMEDICAL ENGINEERING Nobel Prizes and Biomedical Engineering In the year 1901 Wilhelm Conrad Röntgen received Nobel Prize in recognition of the extraordinary services he has rendered by the discovery of the remarkable rays subsequently named after him. Röntgen is considered the father of diagnostic radiology, the medical specialty which uses imaging to diagnose disease. He was the first scientist to observe and record X-rays, first finding them on November 8, 1895. Radiography was the first medical imaging technology. He had been fiddling with a set of cathode ray instruments and was surprised to find a flickering image cast by his instruments separated from them by some W. C. Röntgenn distance. He knew that the image he saw was not being cast by the cathode rays (now known as beams of electrons) as they could not penetrate air for any significant distance. After some considerable investigation, he named the new rays "X" to indicate they were unknown. In the year 1903 Niels Ryberg Finsen received Nobel Prize in recognition of his contribution to the treatment of diseases, especially lupus vulgaris, with concentrated light radiation, whereby he has opened a new avenue for medical science. In beautiful but simple experiments Finsen demonstrated that the most refractive rays (he suggested as the “chemical rays”) from the sun or from an electric arc may have a stimulating effect on the tissues. If the irradiation is too strong, however, it may give rise to tissue damage, but this may to some extent be prevented by pigmentation of the skin as in the negro or in those much exposed to Niels Ryberg Finsen the sun. -

Computing Human Optical Point Spread Functions
Journal of Vision (2015) 15(2):26, 1–25 http://www.journalofvision.org/content/15/2/26 1 Computing human optical point spread functions Andrew B. Watson NASA Ames Research Center, Moffett Field, CA, USA $ There is renewed interest in the role of optics in human The wavefront aberrations can be used to compute vision. At the same time there have been advances that the optical point spread function (PSF; Dai, 2008; allow for routine standardized measurement of the Goodman, 2005; Mahajan, 2013). To do this we first wavefront aberrations of the human eye. Computational define the complex-valued generalized pupil function g, methods have been developed to convert these measurements to a description of the human visual i2p gðx0; y0Þ¼pðx0; y0Þexp wðx0; y0Þ ð2Þ optical point spread function (PSF), and to thereby k calculate the retinal image. However, tools to implement these calculations for vision science are not The real-valued function p is the pupil function that widely available or widely understood. In this report we describes transmission through the pupil. It may be describe software to compute the human optical PSF, defined as 1 within the pupil area and 0 elsewhere, but and we discuss constraints and limitations. may also be used to describe variable transmission as a function of position (apodization), such as due to the Stiles-Crawford effect (Atchison & Scott, 2002; Met- calf, 1965; Stiles & Crawford, 1933). Introduction The PSF for incoherent light is then given by the squared modulus of the Fourier transform of the Vision begins with a retinal image formed by the generalized pupil function, optics of the eye. -

Zernike Polynomials
ZernikePolynomialsForTheWeb.nb James C. Wyant, 2003 1 Zernike Polynomials 1 Introduction Often, to aid in the interpretation of optical test results it is convenient to express wavefront data in polynomial form. Zernike polynomials are often used for this purpose since they are made up of terms that are of the same form as the types of aberrations often observed in optical tests (Zernike, 1934). This is not to say that Zernike polynomials are the best polynomials for fitting test data. Sometimes Zernike polynomials give a poor representation of the wavefront data. For example, Zernikes have little value when air turbulence is present. Likewise, fabrication errors in the single point diamond turning process cannot be represented using a reasonable number of terms in the Zernike polynomial. In the testing of conical optical elements, additional terms must be added to Zernike polynomials to accurately represent alignment errors. The blind use of Zernike polynomials to represent test results can lead to disastrous results. Zernike polynomials are one of an infinite number of complete sets of polynomials in two variables, r and q, that are orthogonal in a continuous fashion over the interior of a unit circle. It is important to note that the Zernikes are orthogonal only in a continuous fashion over the interior of a unit circle, and in general they will not be orthogonal over a discrete set of data points within a unit circle. Zernike polynomials have three properties that distinguish them from other sets of orthogonal polynomials. First, they have simple rotational symmetry properties that lead to a polynomial product of the form r ρ g θ , where g[q] is a continuous function that repeats self every 2p radians and satisfies the requirement that rotating the coordinate system by an angle a does not change the form of the polynomial. -

Computation of 2D Fourier Transforms and Diffraction Integrals Using Gaussian Radial Basis Functions
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Repositorio Institucional de la Universidad de Almería (Spain) Computation of 2D Fourier transforms and diffraction integrals using Gaussian radial basis functions A. Martínez-Finkelshtein, D. Ramos-López and D.R. Iskander Applied and Computational Harmonic Analysis 2016 This is not the published version of the paper, but a pre-print. Please follow the links below for the final version and cite this paper as: A. Martínez-Finkelshtein, D. Ramos-López, D.R. Iskander. Computation of 2D Fourier transforms and diffraction integrals using Gaussian radial basis functions. Applied and Computational Harmonic Analysis, ISSN 1063-5203 (2016). http://dx.doi.org/10.1016/j.acha.2016.01.007 http://www.sciencedirect.com/science/article/pii/S1063520316000087 Computation of 2D Fourier transforms and diffraction integrals using Gaussian radial basis functions A. Martínez-Finkelshtein, D. Ramos-López and D.R. Iskander This is not the published version of the paper, but a pre-print. Please follow the links below for the final version and cite this paper as: A. Martínez-Finkelshtein, D. Ramos-López, D.R. Iskander. Computation of 2D Fourier transforms and diffraction integrals using Gaussian radial basis functions. Applied and Computational Harmonic Analysis, ISSN 1063-5203 (2016). http://dx.doi.org/10.1016/j.acha.2016.01.007 http://www.sciencedirect.com/science/article/pii/S1063520316000087 Computation of 2D Fourier transforms and diffraction integrals using Gaussian