Acoustic-Inertial Underwater Navigation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Graphic Design & Illustration Using Adobe Illustrator CC 1 Dear Candidate, in Preparation for the Graphic Design & Illu
Graphic Design & Illustration Using Adobe Illustrator CC Dear Candidate, In preparation for the Graphic Design & Illustration Using Adobe Illustrator CC certification exam, we’ve put together a set of practice materials and example exam items for you to review. What you’ll find in this packet are: • Topic areas and objectives for the exam. • Links to practice tutorials and files. • Practice exam items. We’ve assembled excerpted material from the Adobe Illustrator CC Learn and Support page, and the Visual Design curriculum to highlight a few of the more challenging techniques covered on the exam. You can work through these technical guides and with the provided image files (provided separately). Additionally, we’ve included the certification objectives so that you are aware of the elements that are covered on the exam. Finally, we’ve included practice exam items to give you a feel for some of the items. These materials are meant to help you familiarize yourself with the areas of the exam so are not comprehensive across all the objectives. Thank you, Adobe Education Adobe, the Adobe logo, Adobe Photoshop and Creative Cloud are either registered trademarks or trademarks of Adobe Systems 1 Incorporated in the United States and/or other countries. All other trademarks are the property of their respective owners. © 2017 Adobe Systems Incorporated. All rights reserved. Graphic Design & Illustration Using Adobe Illustrator CC Adobe Certified Associate in Graphic Design & Illustration Using Adobe Illustrator CC (2015) Exam Structure The following lists the topic areas for the exam: • Setting project requirements • Understanding Digital Graphics and Illustrations • Understanding Adobe Illustrator • Creating Digital Graphics and Illustrations Using Adobe Illustrator • Archive, Export, and Publish Graphics Using Adobe Illustrator Number of Questions and Time • 40 questions • 50 minutes Exam Objectives Domain 1.0 Setting Project Requirements 1.1 Identify the purpose, audience, and audience needs for preparing graphics and illustrations. -

617.727.5944 2.7 Labeling a Picture Or a Diagram
BPS Curriculum Framework > Informational/Explanatory Text > Grade 2 > Drafting and Revising > Labeling a picture or diagram 2.7 Labeling a picture or a Connection : We have been noticing the beautiful pictures and helpful diagram diagrams in our mentor text for “all-about” books. We have even added pictures and diagrams to our own writing to really give our readers a better idea of what our subject looks like, but there is still one more thing we need to think about. We need to be sure our readers understand what they are looking at. Learning Objective: Students will label pictures and Teaching : Labeling our pictures gives our readers a better diagrams from the outdoor understanding of what they are looking at. Our labels help the reader classroom know exactly what they are seeing. It may tell the time of the year, the location, the size, or the specific parts of the subject they are looking at. Let’s look at The “Saddle Up!” Section in the “Kids book of Horses” and see how the author has used labels to teach us the parts of a Mentor Texts: “Volcanoes”; saddle. “Bears, Bears, Bears”; “Try It Think about something in the classroom and tell your partner “Apples”; “The Pumpkin what you might have to label if you were going to illustrate this object. Book”; “ The Kids Horse Book ”, Share out with class. Sylvia Funston Instructions to students for Independent Outdoor Writing : 1. Today, when we go out to the outdoor classroom we are going to choose an object to illustrate. It can be from our classroom list or anything else you see outside (at boat in the harbor, a truck or car going by, a small animal scampering away, or items on the playground: a slide or climbing frame. -

Guns, More Crime Author(S): Mark Duggan Source: Journal of Political Economy, Vol
More Guns, More Crime Author(s): Mark Duggan Source: Journal of Political Economy, Vol. 109, No. 5 (October 2001), pp. 1086-1114 Published by: The University of Chicago Press Stable URL: http://www.jstor.org/stable/10.1086/322833 Accessed: 03-04-2018 19:37 UTC JSTOR is a not-for-profit service that helps scholars, researchers, and students discover, use, and build upon a wide range of content in a trusted digital archive. We use information technology and tools to increase productivity and facilitate new forms of scholarship. For more information about JSTOR, please contact [email protected]. Your use of the JSTOR archive indicates your acceptance of the Terms & Conditions of Use, available at http://about.jstor.org/terms The University of Chicago Press is collaborating with JSTOR to digitize, preserve and extend access to Journal of Political Economy This content downloaded from 153.90.149.52 on Tue, 03 Apr 2018 19:37:56 UTC All use subject to http://about.jstor.org/terms More Guns, More Crime Mark Duggan University of Chicago and National Bureau of Economic Research This paper examines the relationship between gun ownership and crime. Previous research has suffered from a lack of reliable data on gun ownership. I exploit a unique data set to reliably estimate annual rates of gun ownership at both the state and the county levels during the past two decades. My findings demonstrate that changes in gun ownership are significantly positively related to changes in the hom- icide rate, with this relationship driven almost entirely by an impact of gun ownership on murders in which a gun is used. -

Graphics Formats and Tools
Graphics formats and tools Images à recevoir Stand DRG The different types of graphics format Graphics formats can be classified broadly in 3 different groups -Vector - Raster (or bitmap) - Page description language (PDL) Graphics formats and tools 2 Vector formats In a vector format (revisable) a line is defined by 2 points, the text can be edited Graphics formats and tools 3 Raster (bitmap) format A raster (bitmap) format is like a photograph; the number of dots/cm defines the quality of the drawing Graphics formats and tools 4 Page description language (PDL) formats A page description language is a programming language that describes the appearance of a printed page at a higher level than an actual output bitmap Adobe’s PostScript (.ps), Encapsulated PostScript (.eps) and Portable Document Format (.pdf) are some of the best known page description languages Encapsulated PostScript (.eps) is commonly used for graphics It can contain both unstructured vector information as well as raster (bitmap) data Since it comprises a mixture of data, its quality and usability are variable Graphics formats and tools 5 Background Since the invention of computing, or more precisely since the creation of computer-assisted drawing (CAD), two main professions have evolved - Desktop publishing (DTP) developed principally on Macintosh - Computer-assisted drawing or design (CAD) developed principally on IBM (International Business Machines) Graphics formats and tools 6 Use of DTP applications Used greatly in the fields of marketing, journalism and industrial design, DTP applications fulfil the needs of various professions - from sketches and mock-ups to fashion design - interior design - coachwork (body work) design - web page design -etc. -
Nonfiction Text Features Study Guide Text Feature Purpose
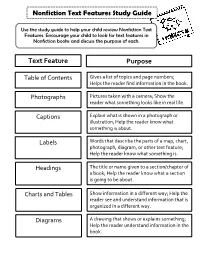
Nonfiction Text Features Study Guide Use the study guide to help your child review Nonfiction Text Features. Encourage your child to look for text features in Nonfiction books and discuss the purpose of each. Text Feature Purpose Gives a list of topics and page numbers; Table of Contents Helps the reader find information in the book. Photographs Pictures taken with a camera; Show the reader what something looks like in real life. Captions Explain what is shown in a photograph or illustration; Help the reader know what something is about. Labels Words that describe the parts of a map, chart, photograph, diagram, or other text feature; Help the reader know what something is. Headings The title or name given to a section/chapter of a book; Help the reader know what a section is going to be about. Charts and Tables Show information in a different way; Help the reader see and understand information that is organized in a different way. Diagrams A drawing that shows or explains something; Help the reader understand information in the book. Text Feature Purpose Textboxes A box or some other shape that contains text; Show the reader that information is important or interesting. A picture of what something looks like on the Cutaways inside or from another point of view; Help the reader see all parts of something. Types of Print Print can be bold, different colors, fonts, and sizes; Show the reader that something is important or interesting. Close Ups Photographs that have been zoomed in or enlarged to help the reader see something better. -

Illustration Degree Offered: Bachelor of Fine Arts
Illustration Degree Offered: Bachelor of Fine Arts Minors Offered: • Art • Art History • Graphic Design • Illustration • Painting • Sculpture • Theatre Arts The BFA in Illustration focuses on developing drawing skills and their application in a professional en vironment, including editorial illustration, children's book illustration, web-site development, and character design for animation. Illustration at Daemen: • Demonstrate a high level of accomplishment with materials related to the graphic arts. • Visually present a narrative voice through individual compositions or series. • Work within a variety of media to explore editorial or sequential imagery. • Develop an editorial voice to support campaigns, storylines, or public initiatives. Illustration Emphasis: The BFA in Illustration at Daemen College combines the creative process of a fine artist with the problem solving techniques and communication skills of a commercial designer. Students are taught to brainstorm solutions, generate new ideas, and explore the materials and techniques best suited to present an idea. By graduation, the Illustration student will have ex perience in editorial, sequential, computer, packaging and storyboard illustration. Illustration studio courses are supported by substantive drawing instruction, as well as fundamental graphic design con cepts. The program's focus on exploration and process prepares students to develop a portfolio to successfully acquire freelance illustration work, or a full-time position in the publishing or digital communications industry. Faculty: The Illustration faculty work in a variety of professional situations by providing illustrations to magazines, poster cam paigns, and websites. Each maintains a freelance career while simultaneously working with students at Daemen in the development of projects and exhibits. 4103 Suggested Course Sequence for Illustration: 4897 10/16 For more information, contact Christian Brandjes in the Department of Visual and Performing Arts at [email protected] or 716-839-8463. -

Ellie Rastian Product Designer 017675131412
[email protected] Ellie Rastian www.65ping.studio Product Designer 017675131412 Experience Certification dunnhumby Germany GmbH Nielsen Norman Group 2018 March - 2020 July (2019) Berlin, Germany UX Certified Web designer Starting as a visual designer, I worked on e- Scrum.org commerce projects related to European Market. (2020) Soon, I showed my skills as a UX/UI designer and Professional Scrum Master was assigned to design the internal website for the Creative Services Team. I worked with the UX team and CS team to develop the website. University of Minnesota coursera Saatchi & Saatchi (2018 - 2019) 2015 March - 2016 June User Interface Design Specialization Kuala Lumpur, Malaysia Visual Designer Involved in ideation and execution for ATL & BTL Education advertising campaigns, proposals and pitches. Clients: MINI Malaysia, Bank Simpanan Nasional Malaysian Institute of Art (BSN). (2014 - 2016) Graphic Design Freelancer 2014 July - Present Shiraz University Visual Designer, UX Designer, Illustrator (2008 - 2010) I have spent over seven years crafting and delivering Bachelor of Business Administration unique digital experiences for global companies and BBA, Accounting and Finance startups such as MINI, Sam Media, Elixir Berlin Khalij Fars Online Language 2008 April - 2010 September Booshehr, Iran English Full professional proficiency Limited working proficiency, B1 Financial Accountant German Persian Full professional proficiency Malay Elementary proficiency Skills Design Tools Interaction Design, Visual Design, Information Sketch, InVision, -

Methodology for Producing a Hand-Drawn Thematic City Map
Master Thesis Methodology for Producing a Hand-Drawn Thematic City Map submitted by: Alika C. Jensen born on: 27.08.1992 in Dayton, Ohio, USA submitted for the academic degree of Master of Science (M.Sc.) Date of Submission 16.10.2017 Supervisors Prof. Dipl.-Phys. Dr.-Ing. habil. Dirk Burghardt Technische Universität Dresden Univ.Prof. Mag.rer.nat. Dr.rer.nat. Georg Gartner Technische Universität Wien Statement of Authorship Herewith I declare that I am the sole author of the thesis named „Methodology for Producing a Hand-Drawn Thematic City Map“ which has been submitted to the study commission of geosciences today. I have fully referenced the ideas and work of others, whether published or unpublished. Literal or analogous citations are clearly marked as such. Dresden, 16.10.2017 Signature Alika C. Jensen 2 Contents Title............................................................................................................................................1 Statement of Authorship...........................................................................................................2 Contents....................................................................................................................................3 Figures.......................................................................................................................................5 Terminology..............................................................................................................................7 1 Introduction...........................................................................................................................8 -

GDT239. Imaging and Illustration
Washtenaw Community College Comprehensive Report GDT 239 Imaging and Illustration Effective Term: Spring/Summer 2016 Course Cover Division: Business and Computer Technologies Department: Digital Media Arts Discipline: Graphic Design Technology Course Number: 239 Org Number: 14500 Full Course Title: Imaging and Illustration Transcript Title: Imaging and Illustration Is Consultation with other department(s) required: No Publish in the Following: College Catalog , Time Schedule , Web Page Reason for Submission: Course Change Change Information: Consultation with all departments affected by this course is required. Pre-requisite, co-requisite, or enrollment restrictions Outcomes/Assessment Rationale: Adding back in to the program after removal from restricted elective. Proposed Start Semester: Spring/Summer 2016 Course Description: In this course, the student develops skills with advanced digital tools, methodologies and concepts for communicating visual solutions with real world relevance. A variety of projects may include information graphics, rendering, editorial and interpretive illustration, spot illustration and promotional illustration. Course Credit Hours Variable hours: No Credits: 4 Lecture Hours: Instructor: 45 Student: 45 Lab: Instructor: 0 Student: 0 Clinical: Instructor: 0 Student: 0 Other: Instructor: 45 Student: 45 Total Contact Hours: Instructor: 90 Student: 90 Repeatable for Credit: NO Grading Methods: Letter Grades Audit Are lectures, labs, or clinicals offered as separate sections?: NO (same sections) College-Level Reading and Writing College-level Reading & Writing College-Level Math Requisites Prerequisite GDT 112 and Prerequisite GDT 104 minimum grade "C+" http://www.curricunet.com/washtenaw/reports/course_outline_HTML.cfm?courses_id=9364[2/9/2016 2:40:25 PM] General Education General Education Area 7 - Computer and Information Literacy Assoc in Arts - Comp Lit Assoc in Applied Sci - Comp Lit Assoc in Science - Comp Lit Request Course Transfer Proposed For: Student Learning Outcomes 1. -

Infographic Designer Quick Start
Infographic Designer Quick Start Infographic Designer is a Power BI custom visual to provide infographic presentation of data. For example, using Infographic Designer, you can create pictographic style column charts or bar charts as shown in Fig. 1. Unlike standard column charts or bar charts, they use a single icon or stacked multiple icons to constitute a column or bar. Icons convey the data concepts in concrete objects, and the size and number of icons can represent data quantities intuitively. Research reveals that such infographics can improve the effectiveness of visualizations by making data quickly understood and easily remembered. As a result, they are getting popular and have been widely adopted in the real world. Now with Infographic Designer, you are able to create infographic visuals in Power BI easily. (A) (B) (C) (D) Fig. 1. Example infographics created by Infographic Designer Overview Infographic Designer visual is structured as a small multiple, where each individual view is a chart of a particular chart type (Fig. 2). Currently it supports column chart, bar chart, and card chart. More chart types (line chart, scatter chart, etc.) will be added in the future. In Fig. 2, A is a small multiple of card chart, and B is a small multiple of column chart. As a special case, when a small multiple comes to 1X1, it is identical to a single chart (see the charts in Fig. 1). (A) (B) Fig. 2. Infographic Designer small multiples For the individual views of the small multiple, Infographic Designer allows you to customize the chart marks to achieve beautiful, readable, and friendly visualizations. -

Art: Graphic Design and Illustration (ARTC) 1
Art: Graphic Design and Illustration (ARTC) 1 ARTC 165 Illustration ART: GRAPHIC DESIGN AND 3 Units (Degree Applicable, CSU) Lecture: 36 Lab: 71 ILLUSTRATION (ARTC) Prerequisite: ARTD 15A or ANIM 104 Corequisite: ARTD 20 or ARTD 21 or ARTD 17A or ANIM 101A (any of ARTC 100 Fundamentals of Graphic Design which may have been taken previously) 3 Units (Degree Applicable, CSU, C-ID #: ARTS 250) Lecture: 36 Lab: 71 Contemporary illustration with an emphasis on story, editorial, and Advisory: ARTD 15A and ARTD 20 advertising applications. Proper uses of illustrative rendering techniques in traditional drawing and painting media, paper, and their integration to Fundamentals of graphic design for the commercial art industry. electronic media. Using professional illustration software, peripherals, Technology, creativity, design, and production. Adobe Photoshop to and color laser printing, students advance to produce more complex produce effective commercial art. illustrations. ARTC 120 Print Design and Advertising ARTC 167 Visual Development 3 Units (Degree Applicable, CSU) 3 Units (Degree Applicable, CSU) Lecture: 36 Lab: 71 Lecture: 36 Lab: 71 Prerequisite: ARTC 100 Prerequisite: ARTC 163 or (ANIM 101A and ARTD 16) Corequisite: ARTD 20 (May be taken previously) Development of conceptual designs for illustration in video games, film, Theories, concepts, and skills for the design and layout of animation, and comic books, using composition, shape, value, and color printed commercial art. Covers typical printed products including as visual tools for storytelling. Students cannot receive credit for both advertisements, flyers, brochures, posters, books, and catalogs. Focuses ARTC 167 and ANIM 167. on using Adobe InDesign with additional exposure to Adobe Photoshop ARTC 169 Contemporary Illustration and Adobe Illustrator. -

The Historical Role of Photomechanical Techniques in Map Production Karen Severud Cook
The Historical Role of Photomechanical Techniques in Map Production Karen Severud Cook ABSTRACT: From the 1880s until the 1970s, photomechanical techniques played an important role in map making. Images created by and for photography were manipulated to form the printing image(s) from which the map was reproduced in multiple copies. After experiments in mapmaking in the 1860s, photomechanical techniques gained acceptance by the 1880s and, thereafter, increasingly dominated mapmaking until their rapid decline after the 1970s, as the shift to computers and electronic technology occurred. When they replaced earlier manual methods in the nineteenth century, photomechanical techniques caused the tools and materials of map production and the roles of personnel to change. Control over image production shifted from the printer to the cartographer as pen-and-ink drafting and associated collage techniques developed in the early 1900s, and even more so when scribing came into general use in the 1960s. Having thus assumed more direct responsibility for the end product (the printed map), the cartographer also adopted methods of predicting and controlling its appearance, such as standardized tools and materials, drafting specifications, flow charting, and color proofing. Through the faster and cheaper production of maps whose graphic presentation of information was enhanced by tonal effects and color printing, photomechanical production techniques also contributed to the growth of the map trade and of map use during the twentieth century. KEYWORDS: Photomechanical map production; map design; map reproduction; production tools; production techniques; production materials; pen-and-ink drafting; photographic halftone screen; photographic tint screen; stick-up; negative scribing; technical pens; photolithography; photoengrav- ing; collage techniques Introduction images for and by photography that ultimately form the printing image(s) from which the map is or about a century (from the 1880s until reproduced in multiple copies.