Michael Lloyd, Ph.D
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
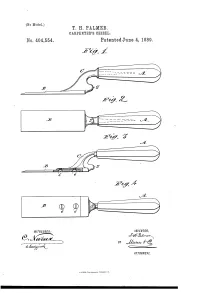
T. H. Palmer. Oarpentbb’S Chisel
(No Model.) T. H. PALMER. OARPENTBB’S CHISEL. _ No. 404,554. I PatentedJune 4, 1889. J , J WITNESSES : 4 ' l/VIg/VTOR ATTOHIVEYJ, UNITED STATES PATENT OFFICE. THE'RON H. PALMER, OF SAN BERNARDINO, CALIFORNIA. CARPENTER’S CHISEL._ SPECIFICATION forming part of Letters Patent No. 404,554, dated June 4, 1889. I Application ?led May 22, 1888.‘ Serial No. 274,724. (No model.) To all whom it may concern; 2, or it may be of a separate piece of mallea Be it known that I, THERON H. PALMER, of ble cast~ir0n or other suitable material and 40 the city and county of San Bernardino, and be joined to the blade B by screws 1) b or oth State of California, have invented a new and erwise. The shank may be secured in the. useful Improvement in Carpenters’ Chisels, handle by a simple tang or in any other de of which the following is a full, clear, and ex sired manner. The trowel-like shape of the act description. ~ > tool provides for cutting gains across a wide 45 This invention consists in a chisel or gouge surface without risk of obstruction by the ' _ for carpenters’ use which has its shank and handle, or the tool may be used as a paring handle portion bent out of line with its blade chisel or for cutting and ?tting in butts or or cutting portion and which is provided with hinges. The crooked shank O is provided at an anvil or hammer-block in rear of the blade its back, as nearly in the same plane as the to form a striking-surface when usingahani cu ttin g-blade as practicable, with aknob-like mer or mallet to force the cutting-tool up to projection S, forming a special anvil or ham its work, instead of striking on the end of mer-block to receive the blows of a hammer the handle direct, which is liable to split or bruise the handle. -

Precision Shop Tools
Precision, Quality, Innovation PRECISION SHOP TOOLS Band Saw Blades Force Measurement Jobsite & Workshop Tools Laser Measurement Metrology Equipment Precision Granite Precision Ground Solutions Precision Measuring Tools PTA & Hand Tools Roundness Measurement Service Webber Gauge Blocks Catalogue 74E PRECISION, QUALITY, iNNOVATiON For more than 132 years, manufacturers, builders and craftsmen worldwide have depended upon precision tools and saws from The L.S. Starrett Company to ensure the consistent quality of their work. They know that the Starrett name on a saw blade, hand tool or measuring tool ensures exceptional quality, innovative products and expert technical assistance. With strict quality control, state-of-the-art equipment and an ongoing commitment to producing superior tools, the thousands of products in today’s Starrett line continue to be the most accurate, robust and durable tools available. This catalogue features those tools most widely used on a jobsite or in a workshop environment. 2 PUNCHES More than 10 models between automatic centre punches with adjustable stroke, centre punches with round shanks, with square shanks, for prick punches, square head nail sets, drive pin punches and brass drive pin punches. 5 Machinists’ levels Starrett offers a wide variety of levels, many for jobsite and workshop applications. This section has a different type of level – precisely made metal tools with ground surfaces designed specifically for machine shop and toolroom use. Products include our Master Precision Level, machinists’ levels with ground and graduated vials, precision bench levels with double plumbs available at up to 600mm / 24", cross test levels, bench levels and a nickel plated pocket level. 13 SHOP TOOLS A wide variety of gauges and precision hand tools designed for the delicate shop work of machinists and toolmakers. -

Solving Cubic Polynomials
Solving Cubic Polynomials 1.1 The general solution to the quadratic equation There are four steps to finding the zeroes of a quadratic polynomial. 1. First divide by the leading term, making the polynomial monic. a 2. Then, given x2 + a x + a , substitute x = y − 1 to obtain an equation without the linear term. 1 0 2 (This is the \depressed" equation.) 3. Solve then for y as a square root. (Remember to use both signs of the square root.) a 4. Once this is done, recover x using the fact that x = y − 1 . 2 For example, let's solve 2x2 + 7x − 15 = 0: First, we divide both sides by 2 to create an equation with leading term equal to one: 7 15 x2 + x − = 0: 2 2 a 7 Then replace x by x = y − 1 = y − to obtain: 2 4 169 y2 = 16 Solve for y: 13 13 y = or − 4 4 Then, solving back for x, we have 3 x = or − 5: 2 This method is equivalent to \completing the square" and is the steps taken in developing the much- memorized quadratic formula. For example, if the original equation is our \high school quadratic" ax2 + bx + c = 0 then the first step creates the equation b c x2 + x + = 0: a a b We then write x = y − and obtain, after simplifying, 2a b2 − 4ac y2 − = 0 4a2 so that p b2 − 4ac y = ± 2a and so p b b2 − 4ac x = − ± : 2a 2a 1 The solutions to this quadratic depend heavily on the value of b2 − 4ac. -

Introduction Into Quaternions for Spacecraft Attitude Representation
Introduction into quaternions for spacecraft attitude representation Dipl. -Ing. Karsten Groÿekatthöfer, Dr. -Ing. Zizung Yoon Technical University of Berlin Department of Astronautics and Aeronautics Berlin, Germany May 31, 2012 Abstract The purpose of this paper is to provide a straight-forward and practical introduction to quaternion operation and calculation for rigid-body attitude representation. Therefore the basic quaternion denition as well as transformation rules and conversion rules to or from other attitude representation parameters are summarized. The quaternion computation rules are supported by practical examples to make each step comprehensible. 1 Introduction Quaternions are widely used as attitude represenation parameter of rigid bodies such as space- crafts. This is due to the fact that quaternion inherently come along with some advantages such as no singularity and computationally less intense compared to other attitude parameters such as Euler angles or a direction cosine matrix. Mainly, quaternions are used to • Parameterize a spacecraft's attitude with respect to reference coordinate system, • Propagate the attitude from one moment to the next by integrating the spacecraft equa- tions of motion, • Perform a coordinate transformation: e.g. calculate a vector in body xed frame from a (by measurement) known vector in inertial frame. However, dierent references use several notations and rules to represent and handle attitude in terms of quaternions, which might be confusing for newcomers [5], [4]. Therefore this article gives a straight-forward and clearly notated introduction into the subject of quaternions for attitude representation. The attitude of a spacecraft is its rotational orientation in space relative to a dened reference coordinate system. -

Circle Theorems
Circle theorems A LEVEL LINKS Scheme of work: 2b. Circles – equation of a circle, geometric problems on a grid Key points • A chord is a straight line joining two points on the circumference of a circle. So AB is a chord. • A tangent is a straight line that touches the circumference of a circle at only one point. The angle between a tangent and the radius is 90°. • Two tangents on a circle that meet at a point outside the circle are equal in length. So AC = BC. • The angle in a semicircle is a right angle. So angle ABC = 90°. • When two angles are subtended by the same arc, the angle at the centre of a circle is twice the angle at the circumference. So angle AOB = 2 × angle ACB. • Angles subtended by the same arc at the circumference are equal. This means that angles in the same segment are equal. So angle ACB = angle ADB and angle CAD = angle CBD. • A cyclic quadrilateral is a quadrilateral with all four vertices on the circumference of a circle. Opposite angles in a cyclic quadrilateral total 180°. So x + y = 180° and p + q = 180°. • The angle between a tangent and chord is equal to the angle in the alternate segment, this is known as the alternate segment theorem. So angle BAT = angle ACB. Examples Example 1 Work out the size of each angle marked with a letter. Give reasons for your answers. Angle a = 360° − 92° 1 The angles in a full turn total 360°. = 268° as the angles in a full turn total 360°. -

20. Geometry of the Circle (SC)
20. GEOMETRY OF THE CIRCLE PARTS OF THE CIRCLE Segments When we speak of a circle we may be referring to the plane figure itself or the boundary of the shape, called the circumference. In solving problems involving the circle, we must be familiar with several theorems. In order to understand these theorems, we review the names given to parts of a circle. Diameter and chord The region that is encompassed between an arc and a chord is called a segment. The region between the chord and the minor arc is called the minor segment. The region between the chord and the major arc is called the major segment. If the chord is a diameter, then both segments are equal and are called semi-circles. The straight line joining any two points on the circle is called a chord. Sectors A diameter is a chord that passes through the center of the circle. It is, therefore, the longest possible chord of a circle. In the diagram, O is the center of the circle, AB is a diameter and PQ is also a chord. Arcs The region that is enclosed by any two radii and an arc is called a sector. If the region is bounded by the two radii and a minor arc, then it is called the minor sector. www.faspassmaths.comIf the region is bounded by two radii and the major arc, it is called the major sector. An arc of a circle is the part of the circumference of the circle that is cut off by a chord. -

Multidisciplinary Design Project Engineering Dictionary Version 0.0.2
Multidisciplinary Design Project Engineering Dictionary Version 0.0.2 February 15, 2006 . DRAFT Cambridge-MIT Institute Multidisciplinary Design Project This Dictionary/Glossary of Engineering terms has been compiled to compliment the work developed as part of the Multi-disciplinary Design Project (MDP), which is a programme to develop teaching material and kits to aid the running of mechtronics projects in Universities and Schools. The project is being carried out with support from the Cambridge-MIT Institute undergraduate teaching programe. For more information about the project please visit the MDP website at http://www-mdp.eng.cam.ac.uk or contact Dr. Peter Long Prof. Alex Slocum Cambridge University Engineering Department Massachusetts Institute of Technology Trumpington Street, 77 Massachusetts Ave. Cambridge. Cambridge MA 02139-4307 CB2 1PZ. USA e-mail: [email protected] e-mail: [email protected] tel: +44 (0) 1223 332779 tel: +1 617 253 0012 For information about the CMI initiative please see Cambridge-MIT Institute website :- http://www.cambridge-mit.org CMI CMI, University of Cambridge Massachusetts Institute of Technology 10 Miller’s Yard, 77 Massachusetts Ave. Mill Lane, Cambridge MA 02139-4307 Cambridge. CB2 1RQ. USA tel: +44 (0) 1223 327207 tel. +1 617 253 7732 fax: +44 (0) 1223 765891 fax. +1 617 258 8539 . DRAFT 2 CMI-MDP Programme 1 Introduction This dictionary/glossary has not been developed as a definative work but as a useful reference book for engi- neering students to search when looking for the meaning of a word/phrase. It has been compiled from a number of existing glossaries together with a number of local additions. -

Caliper Abuse for Beginners a Guide to Quick and Accurate Layout Using Digital Calipers
Caliper Abuse for Beginners A Guide to Quick and Accurate Layout Using Digital Calipers charles z guan productions 21 Mar 2010 In your 2.007 kit, you have been provided with a set of 6” (150mm) digital calipers. You should use these not only for measuring and ascertaining dimensions of parts, but for accurate positioning of holes and other features when manually fabricating a part. Marking out feature positions and part dimensions using a standard ruler is often the first choice for students unfamiliar with engineering tools. This method yields marginal results and usually results in parts which need filing, sanding, or other “one-off” fitting. This document is intended to exposit a fairly common but usually unspoken shortcut that balances time spent laying out a part for fabrication with reasonably accurate results. We will be using a 3 x 1” aluminum box extrusion as the example workpiece. Let's say that we wanted to drill a hole that is 0.975” above the bottom edge of this piece and 1.150” from the right edge. Neither dimension is a common fraction, nor a demarcation found on most rulers. How would we drill such a hole on the drill press? Here, I have set the caliper to 0.975”, after making sure it is properly zeroed. Use the knurled knob to physically lock the caliper to a reading. These calipers have a resolution of 0.0005”. However, this last digit is extremely uncertain. Treat your dimensions as if Calipers are magnetic and can they only have 3 digits attract dirt and grit. -

1. Hand Tools 3. Related Tools 4. Chisels 5. Hammer 6. Saw Terminology 7. Pliers Introduction
1 1. Hand Tools 2. Types 2.1 Hand tools 2.2 Hammer Drill 2.3 Rotary hammer drill 2.4 Cordless drills 2.5 Drill press 2.6 Geared head drill 2.7 Radial arm drill 2.8 Mill drill 3. Related tools 4. Chisels 4.1. Types 4.1.1 Woodworking chisels 4.1.1.1 Lathe tools 4.2 Metalworking chisels 4.2.1 Cold chisel 4.2.2 Hardy chisel 4.3 Stone chisels 4.4 Masonry chisels 4.4.1 Joint chisel 5. Hammer 5.1 Basic design and variations 5.2 The physics of hammering 5.2.1 Hammer as a force amplifier 5.2.2 Effect of the head's mass 5.2.3 Effect of the handle 5.3 War hammers 5.4 Symbolic hammers 6. Saw terminology 6.1 Types of saws 6.1.1 Hand saws 6.1.2. Back saws 6.1.3 Mechanically powered saws 6.1.4. Circular blade saws 6.1.5. Reciprocating blade saws 6.1.6..Continuous band 6.2. Types of saw blades and the cuts they make 6.3. Materials used for saws 7. Pliers Introduction 7.1. Design 7.2.Common types 7.2.1 Gripping pliers (used to improve grip) 7.2 2.Cutting pliers (used to sever or pinch off) 2 7.2.3 Crimping pliers 7.2.4 Rotational pliers 8. Common wrenches / spanners 8.1 Other general wrenches / spanners 8.2. Spe cialized wrenches / spanners 8.3. Spanners in popular culture 9. Hacksaw, surface plate, surface gauge, , vee-block, files 10. -

FIELD EXTENSIONS and the CLASSICAL COMPASS and STRAIGHT-EDGE CONSTRUCTIONS 1. Introduction to the Classical Geometric Problems 1
FIELD EXTENSIONS AND THE CLASSICAL COMPASS AND STRAIGHT-EDGE CONSTRUCTIONS WINSTON GAO Abstract. This paper will introduce the reader to field extensions at a rudi- mentary level and then pursue the subject further by looking to its applications in a discussion of some constructibility issues in the classical straight-edge and compass problems. Field extensions, especially their degrees are explored at an introductory level. Properties of minimal polynomials are discussed to this end. The paper ends with geometric problems and the construction of polygons which have their proofs in the roots of field theory. Contents 1. introduction to the classical geometric problems 1 2. fields, field extensions, and preliminaries 2 3. geometric problems 5 4. constructing regular polygons 8 Acknowledgments 9 References 9 1. Introduction to the Classical Geometric Problems One very important and interesting set of problems within classical Euclidean ge- ometry is the set of compass and straight-edge questions. Basically, these questions deal with what is and is not constructible with only an idealized ruler and compass. The ruler has no markings (hence technically a straight-edge) has infinite length, and zero width. The compass can be extended to infinite distance and is assumed to collapse when lifted from the paper (a restriction that we shall see is irrelevant). Given these, we then study the set of constructible elements. However, while it is interesting to note what kinds objects we can create, it is far less straight forward to show that certain objects are impossible to create with these tools. Three famous problems that we will investigate will be the squaring the circle, doubling the cube, and trisecting an angle. -

1 Review of Inner Products 2 the Approximation Problem and Its Solution Via Orthogonality
Approximation in inner product spaces, and Fourier approximation Math 272, Spring 2018 Any typographical or other corrections about these notes are welcome. 1 Review of inner products An inner product space is a vector space V together with a choice of inner product. Recall that an inner product must be bilinear, symmetric, and positive definite. Since it is positive definite, the quantity h~u;~ui is never negative, and is never 0 unless ~v = ~0. Therefore its square root is well-defined; we define the norm of a vector ~u 2 V to be k~uk = ph~u;~ui: Observe that the norm of a vector is a nonnegative number, and the only vector with norm 0 is the zero vector ~0 itself. In an inner product space, we call two vectors ~u;~v orthogonal if h~u;~vi = 0. We will also write ~u ? ~v as a shorthand to mean that ~u;~v are orthogonal. Because an inner product must be bilinear and symmetry, we also obtain the following expression for the squared norm of a sum of two vectors, which is analogous the to law of cosines in plane geometry. k~u + ~vk2 = h~u + ~v; ~u + ~vi = h~u + ~v; ~ui + h~u + ~v;~vi = h~u;~ui + h~v; ~ui + h~u;~vi + h~v;~vi = k~uk2 + k~vk2 + 2 h~u;~vi : In particular, this gives the following version of the Pythagorean theorem for inner product spaces. Pythagorean theorem for inner products If ~u;~v are orthogonal vectors in an inner product space, then k~u + ~vk2 = k~uk2 + k~vk2: Proof. -

Foundations of Geometry
California State University, San Bernardino CSUSB ScholarWorks Theses Digitization Project John M. Pfau Library 2008 Foundations of geometry Lawrence Michael Clarke Follow this and additional works at: https://scholarworks.lib.csusb.edu/etd-project Part of the Geometry and Topology Commons Recommended Citation Clarke, Lawrence Michael, "Foundations of geometry" (2008). Theses Digitization Project. 3419. https://scholarworks.lib.csusb.edu/etd-project/3419 This Thesis is brought to you for free and open access by the John M. Pfau Library at CSUSB ScholarWorks. It has been accepted for inclusion in Theses Digitization Project by an authorized administrator of CSUSB ScholarWorks. For more information, please contact [email protected]. Foundations of Geometry A Thesis Presented to the Faculty of California State University, San Bernardino In Partial Fulfillment of the Requirements for the Degree Master of Arts in Mathematics by Lawrence Michael Clarke March 2008 Foundations of Geometry A Thesis Presented to the Faculty of California State University, San Bernardino by Lawrence Michael Clarke March 2008 Approved by: 3)?/08 Murran, Committee Chair Date _ ommi^yee Member Susan Addington, Committee Member 1 Peter Williams, Chair, Department of Mathematics Department of Mathematics iii Abstract In this paper, a brief introduction to the history, and development, of Euclidean Geometry will be followed by a biographical background of David Hilbert, highlighting significant events in his educational and professional life. In an attempt to add rigor to the presentation of Geometry, Hilbert defined concepts and presented five groups of axioms that were mutually independent yet compatible, including introducing axioms of congruence in order to present displacement.