Unified Algorithmic Framework for High Degree of Freedom Complex
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Code of Ethics for Robotics Engineers
A CODE OF ETHICS FOR ROBOTICS ENGINEERS An Interactive Qualifying Project Report Submitted to the faculty of WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Bachelor of Science By: Brandon Ingram Daniel Jones Andrew Lewis Matthew Richards Advisors: Professor Lance Schachterle Professor Charles Rich 3/6/2010 Code of Ethics for Robotics Engineers 2 Abstract This project developed a draft code of ethics for professional robotics engineers by researching into the fields of robotics, ethics and roboethics to develop the necessary understanding. The code was drafted and presented to students, professors and professionals for feedback and revision. The code is now hosted at the Illinois Institute of Technology’s Center for the Study of Ethics in the Professions website (ethics.iit.edu), and is open for discussion at (rbethics.lefora.com). It is being proposed for adoption to the WPI Robotics Program faculty and the WPI Robotics Engineering Honors Fraternity, Rho Beta Epsilon. Acknowledgements In addition to our advisors, we would like to thank all have helped in researching and developing this code of ethics, either by providing feedback or information. Those that helped on campus include: John Sanbonmatsu, Kent Rissmiller, Michael Gennert, Brad Miller, Aaron Holroyd, Brian Benson, Elizabeth Alexander, Ciarán Murphy, Phi Sigma Kappa, Phi Kappa Theta, the WPI Robotics Faculty and Rho Beta Epsilon. Those off campus include: P.W. Singer, Martin Sklar, Jim Mail, Ronald Arkin, and Kelly Laas. Code of Ethics -

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
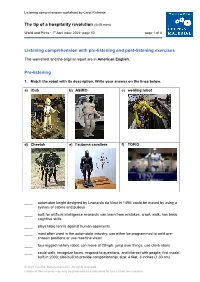
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

An Introduction to the NASA Robotics Alliance Cadets Program
Session F An Introduction to the NASA Robotics Alliance Cadets Program David R. Schneider, Clare van den Blink NASA, DAVANNE, & Cornell University / Cornell University CIT [email protected], [email protected] Abstract The 2006 report National Defense Education and Innovation Initiative highlighted this nation’s growing need to revitalize undergraduate STEM education. In response, NASA has partnered with the DAVANNE Corporation to create the NASA Robotics Alliance Cadets Program to develop innovative, highly integrated and interactive curriculum to redesign the first two years of Mechanical Engineering, Electrical Engineering and Computer Science. This paper introduces the NASA Cadets Program and provides insight into the skill areas targeted by the program as well as the assessment methodology for determining the program’s effectiveness. The paper also offers a brief discussion on the capabilities of the program’s robotic platform and a justification for its design into the program. As an example of the integration of the robotic platform with the program’s methodologies, this paper concludes by outlining one of the first educational experiments of NASA Cadets Program at Cornell University to be implemented in the Spring 2007 semester. I. Introduction To be an engineer is to be a designer, a creator of new technology, and the everyday hero that solves society’s problems through innovative methods and products by making ideas become a reality. However, the opportunity to truly explore these key concepts of being an engineer are often withheld from most incoming engineering students until at least their junior year causing many new students to lose motivation and potentially leave the program. -

Towards a Robot Learning Architecture
From: AAAI Technical Report WS-93-06. Compilation copyright © 1993, AAAI (www.aaai.org). All rights reserved. Towards a Robot Learning Architecture Joseph O’Sullivan* School Of Computer Science, Carnegie Mellon University, Pittsburgh, PA 15213 email: josu][email protected] Abstract continuously improves its performance through learning. I summarize research toward a robot learning Such a robot must be capable of aa autonomous exis- architecture intended to enable a mobile robot tence during which its world knowledge is continuously to learn a wide range of find-and-fetch tasks. refined from experience as well as from teachings. In particular, this paper summarizesrecent re- It is all too easy to assumethat a learning agent has search in the Learning Robots Laboratory at unrealistic initial capabilities such as a prepared environ- Carnegie Mellon University on aspects of robot ment mapor perfect knowledgeof its actions. To ground learning, and our current worktoward integrat- our research, we use s Heath/Zenith Hero 2000 robot ing and extending this within a single archi- (named simply "Hero"), a commerc/aI wheeled mobile tecture. In previous work we developed sys- manipulator with a two finger hand, as a testbed on tems that learn action models for robot ma- whichsuccess or failure is judged. nipulation, learn cost-effective strategies for us- In rids paper, I describe the steps being taken to design ing sensors to approach and classify objects, and implement a learning robot agent. In Design Prin- learn models of sonar sensors for map build- ciples, an outline is stated of the believed requirements ing, learn reactive control strategies via rein- for a successful agent. -

Pdf • Cynthia Breazeal
© copyright by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic 2019. https://www.human-robot-interaction.org Human{Robot Interaction An Introduction Christoph Bartneck, Tony Belpaeme, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, Selma Sabanovi´cˇ This material has been published by Cambridge University Press as Human Robot Interaction by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic. ISBN: 9781108735407 (http://www.cambridge.org/9781108735407). This pre-publication version is free to view and download for personal use only. Not for re-distribution, re-sale or use in derivative works. © copyright by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic 2019. https://www.human-robot-interaction.org This material has been published by Cambridge University Press as Human Robot Interaction by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic. ISBN: 9781108735407 (http://www.cambridge.org/9781108735407). This pre-publication version is free to view and download for personal use only. Not for re-distribution, re-sale or use in derivative works. © copyright by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic 2019. https://www.human-robot-interaction.org Contents List of illustrations viii List of tables xi 1 Introduction 1 1.1 About this book 1 1.2 Christoph -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -

Ph. D. Thesis Stable Locomotion of Humanoid Robots Based
Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Department of System and Automation Engineering Legan´es, October 2008 i Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Signature of the board: Signature President Vocal Vocal Vocal Secretary Rating: Legan´es, de de Contents 1 Introduction 1 1.1 HistoryofRobots........................... 2 1.1.1 Industrialrobotsstory. 2 1.1.2 Servicerobots......................... 4 1.1.3 Science fiction and robots currently . 10 1.2 Walkingrobots ............................ 10 1.2.1 Outline ............................ 10 1.2.2 Themes of legged robots . 13 1.2.3 Alternative mechanisms of locomotion: Wheeled robots, tracked robots, active cords . 15 1.3 Why study legged machines? . 20 1.4 What control mechanisms do humans and animals use? . 25 1.5 What are problems of biped control? . 27 1.6 Features and applications of humanoid robots with biped loco- motion................................. 29 1.7 Objectives............................... 30 1.8 Thesiscontents ............................ 33 2 Humanoid robots 35 2.1 Human evolution to biped locomotion, intelligence and bipedalism 36 2.2 Types of researches on humanoid robots . 37 2.3 Main humanoid robot research projects . 38 2.3.1 The Humanoid Robot at Waseda University . 38 2.3.2 Hondarobots......................... 47 2.3.3 TheHRPproject....................... 51 2.4 Other humanoids . 54 2.4.1 The Johnnie project . 54 2.4.2 The Robonaut project . 55 2.4.3 The COG project . -

Robotics Irobot Corp. (IRBT)
Robotics This report is published for educational purposes only by students competing in the Boston Security Analysts Society (BSAS) Boston Investment iRobot Corp. (IRBT) Research Challenge. 12/13/2010 Ticker: IRBT Recommendation: Sell Price: $22.84 Price Target: $15.20-16.60 Market Profile Figure 1.1: iRobot historical stock price Shares O/S 25 mm 25 Current price $22.84 52 wk price range $14.45-$23.00 20 Beta 1.86 iRobot 3 mo ADTV 0.14 mm 15 Short interest 2.1 mm Market cap $581mm 10 Debt 0 S & P 500 (benchmarked Jan-09) P/10E 25.2x 5 EV/10 EBITDA 13.5x Instl holdings 57.8% 0 Jan-09 Apr-09 Jul-09 Oct-09 Jan-10 Apr-10 Jul-10 Oct-10 Insider holdings 12.5% Valuation Ranges iRobot is a SELL: The company’s high valuation reflects overly optimistic expectations for home and military robot sales. While we are bullish on robotics, iRobot’s 52 wk range growth story has run out of steam. • Consensus is overestimating future home robot sales: Rapid yoy growth in 2010 home robot Street targets sales is the result of one-time penetration of international markets, which has concealed declining domestic sales. Entry into new markets drove growth in home robot sales in Q4 2009 and Q1 2010, 20-25x P/2011E but international sales have fallen 4% since Q1 this year, and we believe the street is overestimating international growth in 2011 (30% vs. our estimate of 18%). Domestic sales were down 29% in 8-12x Terminal 2009 and are up only 2.5% ytd. -

Packaging Specifications and Design
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 4: Packaging Specifications and Design Team Code Name: 2D-MPR Group No. 12 Team Member Completing This Homework: Tyler Neuenschwander E-mail Address of Team Member: tcneuens@ purdue.edu NOTE: This is the first in a series of four “design component” homework assignments, each of which is to be completed by one team member. The body of the report should be 3-5 pages, not including this cover page, references, attachments or appendices. Evaluation: SCORE DESCRIPTION Excellent – among the best papers submitted for this assignment. Very few 10 corrections needed for version submitted in Final Report. Very good – all requirements aptly met. Minor additions/corrections needed for 9 version submitted in Final Report. Good – all requirements considered and addressed. Several noteworthy 8 additions/corrections needed for version submitted in Final Report. Average – all requirements basically met, but some revisions in content should 7 be made for the version submitted in the Final Report. Marginal – all requirements met at a nominal level. Significant revisions in 6 content should be made for the version submitted in the Final Report. Below the passing threshold – major revisions required to meet report * requirements at a nominal level. Revise and resubmit. * Resubmissions are due within one week of the date of return, and will be awarded a score of “6” provided all report requirements have been met at a nominal level. Comments: Comments from the grader will be inserted here. ECE 477 Digital Systems Senior Design Project Rev 8/09 1.0 Introduction The 2D-MPR is an autonomous robot designed to collect data required to map a room. -
Irobot: ROBOTS for the HOME
Licensed to: iChapters User CASE 5 iROBOT: ROBOTS FOR THE HOME Robots have been around for a long time. Detroit has appeared on the cover of Popular Science. It was clear used robots for four decades to build cars, and manu- by then that his future lay in inventions. facturers of all kinds of goods use some form of robot- ics to achieve effi ciencies and productivity. But until The Opportunity iRobot brought its battery-powered vacuum cleaner to the market, no one had successfully used robots in In 1990, Brooks and Angle, who by then had be- the home as an appliance. The issue was not whether it come close working partners with their MIT col- was possible to use robots in the home, but could they league Helen Greiner, borrowed from their credit be produced at a price customers would pay. Until the cards and used bank debt to found iRobot in a tiny introduction of Roomba, iRobot’s intelligent vacuum apartment in Somerville, Massachusetts. The goal of cleaner, robots for the home cost tens of thousands of the company was to build robots that would affect dollars. At Roomba’s price point of $$199,199, it was now hhowow peppeopleople llivedived ttheirheir llives.ivese . AtAt tthathaat ttime, no one possiblee ffororor ttheheh aaveragevev rar gee cconsumeronsus meer too aaffordfford to hhaveava e a cocouldoulld coconceivenceie ve ooff a wawwayy tot bbringringn rrobotsoboto s into domes- robot cleanleaean the hohhouse.usu e.. TThathah t inn iitselftssele f is aann iniinterestingteerrests inng titicc lilifefe iinn aan aaffordableffforordad blle wwaway,y, aandndd iiRobotRoR bob t was still years story, bututt eevenveen mommorerer iinterestingnteresestitingg iiss ththehe eneentrepreneurialnttrepepreenen ururiiaal awawayayy ffromroom didiscoveringsscoovverrini g ththee oononee aapapplicationppliccatiio that would journey of Colin Angle and his company, iRobot. -

Assistive Humanoid Robot MARKO: Development of the Neck Mechanism
MATEC Web of Conferences 121, 08005 (2017) DOI: 10.1051/ matecconf/201712108005 MSE 2017 Assistive humanoid robot MARKO: development of the neck mechanism Marko Penčić1,*, Maja Čavić1, Srđan Savić1, Milan Rackov1, Branislav Borovac1, and Zhenli Lu2 1Faculty of Technical Sciences, University of Novi Sad, TrgDositejaObradovića 6, 21000 Novi Sad, Serbia 2School of Electrical Engineering and Automation, Changshu Institute of Technology, Hushan Road 99, 215500 Changshu, People's Republic of China Abstract.The paper presents the development of neck mechanism for humanoid robots. The research was conducted within the project which is developing a humanoid robot Marko that represents assistive apparatus in the physical therapy for children with cerebral palsy.There are two basic ways for the neck realization of the robots. The first is based on low backlash mechanisms that have high stiffness and the second one based on the viscoelastic elements having variable flexibility. We suggest low backlash differential gear mechanism that requires small actuators. Based on the kinematic-dynamic requirements a dynamic model of the robots upper body is formed. Dynamic simulation for several positions of the robot was performed and the driving torques of neck mechanism are determined.Realized neck has 2 DOFs and enables movements in the direction of flexion-extension 100°, rotation ±90° and the combination of these two movements. It consists of a differential mechanism with three spiral bevel gears of which the two are driving and are identical, and the third one which is driven gear to which the robot head is attached. Power transmission and motion from the actuators to the input links of the differential mechanism is realized with two parallel placed gear mechanisms that are identical.Neck mechanism has high carrying capacity and reliability, high efficiency, low backlash that provide high positioning accuracy and repeatability of movements, compact design and small mass and dimensions.