Design of Android Type Humanoid Robot Albert HUBO€
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Code of Ethics for Robotics Engineers
A CODE OF ETHICS FOR ROBOTICS ENGINEERS An Interactive Qualifying Project Report Submitted to the faculty of WORCESTER POLYTECHNIC INSTITUTE In partial fulfillment of the requirements for the Degree of Bachelor of Science By: Brandon Ingram Daniel Jones Andrew Lewis Matthew Richards Advisors: Professor Lance Schachterle Professor Charles Rich 3/6/2010 Code of Ethics for Robotics Engineers 2 Abstract This project developed a draft code of ethics for professional robotics engineers by researching into the fields of robotics, ethics and roboethics to develop the necessary understanding. The code was drafted and presented to students, professors and professionals for feedback and revision. The code is now hosted at the Illinois Institute of Technology’s Center for the Study of Ethics in the Professions website (ethics.iit.edu), and is open for discussion at (rbethics.lefora.com). It is being proposed for adoption to the WPI Robotics Program faculty and the WPI Robotics Engineering Honors Fraternity, Rho Beta Epsilon. Acknowledgements In addition to our advisors, we would like to thank all have helped in researching and developing this code of ethics, either by providing feedback or information. Those that helped on campus include: John Sanbonmatsu, Kent Rissmiller, Michael Gennert, Brad Miller, Aaron Holroyd, Brian Benson, Elizabeth Alexander, Ciarán Murphy, Phi Sigma Kappa, Phi Kappa Theta, the WPI Robotics Faculty and Rho Beta Epsilon. Those off campus include: P.W. Singer, Martin Sklar, Jim Mail, Ronald Arkin, and Kelly Laas. Code of Ethics -

Science Fiction in Argentina: Technologies of the Text in A
Revised Pages Science Fiction in Argentina Revised Pages DIGITALCULTUREBOOKS, an imprint of the University of Michigan Press, is dedicated to publishing work in new media studies and the emerging field of digital humanities. Revised Pages Science Fiction in Argentina Technologies of the Text in a Material Multiverse Joanna Page University of Michigan Press Ann Arbor Revised Pages Copyright © 2016 by Joanna Page Some rights reserved This work is licensed under the Creative Commons Attribution- Noncommercial- No Derivative Works 3.0 United States License. To view a copy of this license, visit http://creativecommons.org/licenses/by-nc-nd/3.0/ or send a letter to Creative Commons, 171 Second Street, Suite 300, San Francisco, California, 94105, USA. Published in the United States of America by the University of Michigan Press Manufactured in the United States of America c Printed on acid- free paper 2019 2018 2017 2016 4 3 2 1 A CIP catalog record for this book is available from the British Library. Library of Congress Cataloging- in- Publication Data Names: Page, Joanna, 1974– author. Title: Science fiction in Argentina : technologies of the text in a material multiverse / Joanna Page. Description: Ann Arbor : University of Michigan Press, [2016] | Includes bibliographical references and index. Identifiers: LCCN 2015044531| ISBN 9780472073108 (hardback : acid- free paper) | ISBN 9780472053100 (paperback : acid- free paper) | ISBN 9780472121878 (e- book) Subjects: LCSH: Science fiction, Argentine— History and criticism. | Literature and technology— Argentina. | Fantasy fiction, Argentine— History and criticism. | BISAC: LITERARY CRITICISM / Science Fiction & Fantasy. | LITERARY CRITICISM / Caribbean & Latin American. Classification: LCC PQ7707.S34 P34 2016 | DDC 860.9/35882— dc23 LC record available at http://lccn.loc.gov/2015044531 http://dx.doi.org/10.3998/dcbooks.13607062.0001.001 Revised Pages To my brother, who came into this world to disrupt my neat ordering of it, a talent I now admire. -
Robotics Section Guide for Web.Indd
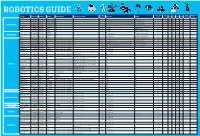
ROBOTICS GUIDE Soldering Teachers Notes Early Higher Hobby/Home The Robot Product Code Description The Brand Assembly Required Tools That May Be Helpful Devices Req Software KS1 KS2 KS3 KS4 Required Available Years Education School VEX 123! 70-6250 CLICK HERE VEX No ✘ None No ✔ ✔ ✔ ✔ Dot 70-1101 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Dash 70-1100 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ ✔ Ready to Go Robot Cue 70-1108 CLICK HERE Wonder Workshop No ✘ iOS or Android phones/tablets. Apps are also available for Kindle. Free Apps to download ✔ ✔ ✔ ✔ Codey Rocky 75-0516 CLICK HERE Makeblock No ✘ PC, Laptop Free downloadb ale Mblock Software ✔ ✔ ✔ ✔ Ozobot 70-8200 CLICK HERE Ozobot No ✘ PC, Laptop Free downloads ✔ ✔ ✔ ✔ Ohbot 76-0000 CLICK HERE Ohbot No ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ SoftBank NAO 70-8893 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Humanoid Robots SoftBank Pepper 70-8870 CLICK HERE No ✘ PC, Laptop or Ipad Choregraph - free to download ✔ ✔ ✔ ✔ ✔ ✔ ✔ Robotics Ohbot 76-0001 CLICK HERE Ohbot Assembly is part of the fun & learning! ✘ PC, Laptop Free downloads for Windows or Pi ✔ ✔ ✔ ✔ FABLE 00-0408 CLICK HERE Shape Robotics Assembly is part of the fun & learning! ✘ PC, Laptop or Ipad Free Downloadable ✔ ✔ ✔ ✔ VEX GO! 70-6311 CLICK HERE VEX Assembly is part of the fun & learning! ✘ Windows, Mac, -
![Robots: Everywhere Around Us [A Dream Coming True]](https://docslib.b-cdn.net/cover/3084/robots-everywhere-around-us-a-dream-coming-true-233084.webp)
Robots: Everywhere Around Us [A Dream Coming True]
Institute of Electrical and Electronics Engineers (IEEE) Robotics & Automation Society Egypt Chapter Robots: Everywhere around us [A Dream Coming True] Prepared by: Dr. Alaa Khamis, Egypt Chapter Chair Presented by: Eng. Omar Mahmoud http://www.ras-egypt.org/ MUSES_SECRET:© Dr. Alaa Khamis, ORF IEEE-RE RAS Project – Egypt - Chapter© PAMI – Research Robots: Around Group –us University Everywhere of Waterloo 1/221 Outline • IEEE RAS – Egypt Chapter MUSES_SECRET:• What ORFis- REa Project Robot? - © PAMI Research Group – University of Waterloo • What is Robotics? • Science Fiction • Science Facts • Robots Today • Robots’ Future MUSES_SECRET:© Dr. Alaa Khamis, ORF IEEE-RE RAS Project – Egypt - Chapter© PAMI – Research Robots: Around Group –us University Everywhere of Waterloo 2/222 Outline • IEEE RAS – Egypt Chapter MUSES_SECRET:• What ORFis- REa Project Robot? - © PAMI Research Group – University of Waterloo • What is Robotics? • Science Fiction • Science Facts • Robots Today • Robots’ Future MUSES_SECRET:© Dr. Alaa Khamis, ORF IEEE-RE RAS Project – Egypt - Chapter© PAMI – Research Robots: Around Group –us University Everywhere of Waterloo 3/223 IEEE RAS – Egypt Chapter Established in Sept. 2011 to become the meeting place of choice for the robotics and automation community in Egypt. MUSES_SECRET:© Dr. Alaa Khamis, ORF IEEE-RE RAS Project – Egypt - Chapter© PAMI – Research Robots: Around Group –us University Everywhere of Waterloo 4/224 IEEE RAS – Egypt Chapter • Conferences & Workshops • Seminars & Webinars • Free Courses • Robotic Competitions MUSES_SECRET:© Dr. Alaa Khamis, ORF IEEE-RE RAS Project – Egypt - Chapter© PAMI – Research Robots: Around Group –us University Everywhere of Waterloo 5/225 Conferences & Workshops MUSES_SECRET:© Dr. Alaa Khamis, ORF IEEE-RE RAS Project – Egypt - Chapter© PAMI – Research Robots: Around Group –us University Everywhere of Waterloo 6/226 ICET 2012 http://landminefree.org/ http://www.icet-guc.org/2012/ MUSES_SECRET:© Dr. -

Cybernetic Human HRP-4C: a Humanoid Robot with Human-Like Proportions
Cybernetic Human HRP-4C: A humanoid robot with human-like proportions Shuuji KAJITA, Kenji KANEKO, Fumio KANEIRO, Kensuke HARADA, Mitsuharu MORISAWA, Shin’ichiro NAKAOKA, Kanako MIURA, Kiyoshi FUJIWARA, Ee Sian NEO, Isao HARA, Kazuhito YOKOI, Hirohisa HIRUKAWA Abstract Cybernetic human HRP-4C is a humanoid robot whose body dimensions were designed to match the average Japanese young female. In this paper, we ex- plain the aim of the development, realization of human-like shape and dimensions, research to realize human-like motion and interactions using speech recognition. 1 Introduction Cybernetics studies the dynamics of information as a common principle of com- plex systems which have goals or purposes. The systems can be machines, animals or a social systems, therefore, cybernetics is multidiciplinary from its nature. Since Norbert Wiener advocated the concept in his book in 1948[1], the term has widely spreaded into academic and pop culture. At present, cybernetics has diverged into robotics, control theory, artificial intelligence and many other research fields, how- ever, the original unified concept has not yet lost its glory. Robotics is one of the biggest streams that branched out from cybernetics, and its goal is to create a useful system by combining mechanical devices with information technology. From a practical point of view, a robot does not have to be humanoid; nevertheless we believe the concept of cybernetics can justify the research of hu- manoid robots for it can be an effective hub of multidiciplinary research. WABOT-1, -

Fetishism and the Culture of the Automobile
FETISHISM AND THE CULTURE OF THE AUTOMOBILE James Duncan Mackintosh B.A.(hons.), Simon Fraser University, 1985 THESIS SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS in the Department of Communication Q~amesMackintosh 1990 SIMON FRASER UNIVERSITY August 1990 All rights reserved. This work may not be reproduced in whole or in part, by photocopy or other means, without permission of the author. APPROVAL NAME : James Duncan Mackintosh DEGREE : Master of Arts (Communication) TITLE OF THESIS: Fetishism and the Culture of the Automobile EXAMINING COMMITTEE: Chairman : Dr. William D. Richards, Jr. \ -1 Dr. Martih Labbu Associate Professor Senior Supervisor Dr. Alison C.M. Beale Assistant Professor \I I Dr. - Jerry Zqlove, Associate Professor, Department of ~n~lish, External Examiner DATE APPROVED : 20 August 1990 PARTIAL COPYRIGHT LICENCE I hereby grant to Simon Fraser University the right to lend my thesis or dissertation (the title of which is shown below) to users of the Simon Fraser University Library, and to make partial or single copies only for such users or in response to a request from the library of any other university, or other educational institution, on its own behalf or for one of its users. I further agree that permission for multiple copying of this thesis for scholarly purposes may be granted by me or the Dean of Graduate Studies. It is understood that copying or publication of this thesis for financial gain shall not be allowed without my written permission. Title of Thesis/Dissertation: Fetishism and the Culture of the Automobile. Author : -re James Duncan Mackintosh name 20 August 1990 date ABSTRACT This thesis explores the notion of fetishism as an appropriate instrument of cultural criticism to investigate the rites and rituals surrounding the automobile. -

Hospitality Robots at Your Service WHITEPAPER
WHITEPAPER Hospitality Robots At Your Service TABLE OF CONTENTS THE SERVICE ROBOT MARKET EXAMPLES OF SERVICE ROBOTS IN THE HOSPITALITY SPACE IN DEPTH WITH SAVIOKE’S HOSPITALITY ROBOTS PEPPER PROVIDES FRIENDLY, FUN CUSTOMER ASSISTANCE SANBOT’S HOSPITALITY ROBOTS AIM FOR HOTELS, BANKING EXPECT MORE ROBOTS DOING SERVICE WORK roboticsbusinessreview.com 2 MOBILE AND HUMANOID ROBOTS INTERACT WITH CUSTOMERS ACROSS THE HOSPITALITY SPACE Improvements in mobility, autonomy and software drive growth in robots that can provide better service for customers and guests in the hospitality space By Ed O’Brien Across the business landscape, robots have entered many different industries, and the service market is no difference. With several applications in the hospitality, restaurant, and healthcare markets, new types of service robots are making life easier for customers and employees. For example, mobile robots can now make deliveries in a hotel, move materials in a hospital, provide security patrols on large campuses, take inventories or interact with retail customers. They offer expanded capabilities that can largely remove humans from having to perform repetitive, tedious, and often unwanted tasks. Companies designing and manufacturing such robots are offering unique approaches to customer service, providing systems to help fill in areas where labor shortages are prevalent, and creating increased revenues by offering new delivery channels, literally and figuratively. However, businesses looking to use these new robots need to be mindful of reviewing the underlying demand to ensure that such investments make sense in the long run. In this report, we will review the different types of robots aimed at providing hospitality services, their various missions, and expectations for growth in the near-to-immediate future. -

PETMAN: a Humanoid Robot for Testing Chemical Protective Clothing
372 日本ロボット学会誌 Vol. 30 No. 4, pp.372~377, 2012 解説 PETMAN: A Humanoid Robot for Testing Chemical Protective Clothing Gabe Nelson∗, Aaron Saunders∗, Neil Neville∗, Ben Swilling∗, Joe Bondaryk∗, Devin Billings∗, Chris Lee∗, Robert Playter∗ and Marc Raibert∗ ∗Boston Dynamics 1. Introduction Petman is an anthropomorphic robot designed to test chemical protective clothing (Fig. 1). Petman will test Individual Protective Equipment (IPE) in an envi- ronmentally controlled test chamber, where it will be exposed to chemical agents as it walks and does basic calisthenics. Chemical sensors embedded in the skin of the robot will measure if, when and where chemi- cal agents are detected within the suit. The robot will perform its tests in a chamber under controlled temper- ature and wind conditions. A treadmill and turntable integrated into the wind tunnel chamber allow for sus- tained walking experiments that can be oriented rela- tive to the wind. Petman’s skin is temperature con- trolled and even sweats in order to simulate physiologic conditions within the suit. When the robot is per- forming tests, a loose fitting Intelligent Safety Harness (ISH) will be present to support or catch and restart the robot should it lose balance or suffer a mechani- cal failure. The integrated system: the robot, chamber, treadmill/turntable, ISH and electrical, mechanical and software systems for testing IPE is called the Individual Protective Ensemble Mannequin System (Fig. 2)andis Fig. 1 The Petman robot walking on a treadmill being built by a team of organizations.† In 2009 when we began the design of Petman,there where the external fixture attaches to the robot. -

Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion
TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Angewandte Mechanik Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion Entwurf und Realisierung eines Humanoiden Roboters für Schnelles und Autonomes Laufen Dipl.-Ing. Univ. Sebastian Lohmeier Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität München zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. Udo Lindemann Prüfer der Dissertation: 1. Univ.-Prof. Dr.-Ing. habil. Heinz Ulbrich 2. Univ.-Prof. Dr.-Ing. Horst Baier Die Dissertation wurde am 2. Juni 2010 bei der Technischen Universität München eingereicht und durch die Fakultät für Maschinenwesen am 21. Oktober 2010 angenommen. Colophon The original source for this thesis was edited in GNU Emacs and aucTEX, typeset using pdfLATEX in an automated process using GNU make, and output as PDF. The document was compiled with the LATEX 2" class AMdiss (based on the KOMA-Script class scrreprt). AMdiss is part of the AMclasses bundle that was developed by the author for writing term papers, Diploma theses and dissertations at the Institute of Applied Mechanics, Technische Universität München. Photographs and CAD screenshots were processed and enhanced with THE GIMP. Most vector graphics were drawn with CorelDraw X3, exported as Encapsulated PostScript, and edited with psfrag to obtain high-quality labeling. Some smaller and text-heavy graphics (flowcharts, etc.), as well as diagrams were created using PSTricks. The plot raw data were preprocessed with Matlab. In order to use the PostScript- based LATEX packages with pdfLATEX, a toolchain based on pst-pdf and Ghostscript was used. -

History of Robotics: Timeline
History of Robotics: Timeline This history of robotics is intertwined with the histories of technology, science and the basic principle of progress. Technology used in computing, electricity, even pneumatics and hydraulics can all be considered a part of the history of robotics. The timeline presented is therefore far from complete. Robotics currently represents one of mankind’s greatest accomplishments and is the single greatest attempt of mankind to produce an artificial, sentient being. It is only in recent years that manufacturers are making robotics increasingly available and attainable to the general public. The focus of this timeline is to provide the reader with a general overview of robotics (with a focus more on mobile robots) and to give an appreciation for the inventors and innovators in this field who have helped robotics to become what it is today. RobotShop Distribution Inc., 2008 www.robotshop.ca www.robotshop.us Greek Times Some historians affirm that Talos, a giant creature written about in ancient greek literature, was a creature (either a man or a bull) made of bronze, given by Zeus to Europa. [6] According to one version of the myths he was created in Sardinia by Hephaestus on Zeus' command, who gave him to the Cretan king Minos. In another version Talos came to Crete with Zeus to watch over his love Europa, and Minos received him as a gift from her. There are suppositions that his name Talos in the old Cretan language meant the "Sun" and that Zeus was known in Crete by the similar name of Zeus Tallaios. -

Ph. D. Thesis Stable Locomotion of Humanoid Robots Based
Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Department of System and Automation Engineering Legan´es, October 2008 i Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Signature of the board: Signature President Vocal Vocal Vocal Secretary Rating: Legan´es, de de Contents 1 Introduction 1 1.1 HistoryofRobots........................... 2 1.1.1 Industrialrobotsstory. 2 1.1.2 Servicerobots......................... 4 1.1.3 Science fiction and robots currently . 10 1.2 Walkingrobots ............................ 10 1.2.1 Outline ............................ 10 1.2.2 Themes of legged robots . 13 1.2.3 Alternative mechanisms of locomotion: Wheeled robots, tracked robots, active cords . 15 1.3 Why study legged machines? . 20 1.4 What control mechanisms do humans and animals use? . 25 1.5 What are problems of biped control? . 27 1.6 Features and applications of humanoid robots with biped loco- motion................................. 29 1.7 Objectives............................... 30 1.8 Thesiscontents ............................ 33 2 Humanoid robots 35 2.1 Human evolution to biped locomotion, intelligence and bipedalism 36 2.2 Types of researches on humanoid robots . 37 2.3 Main humanoid robot research projects . 38 2.3.1 The Humanoid Robot at Waseda University . 38 2.3.2 Hondarobots......................... 47 2.3.3 TheHRPproject....................... 51 2.4 Other humanoids . 54 2.4.1 The Johnnie project . 54 2.4.2 The Robonaut project . 55 2.4.3 The COG project . -

Employing Animatronics in Teaching Engineering Design
AC 2011-190: EMPLOYING ANIMATRONICS IN TEACHING ENGINEER- ING DESIGN Arif Sirinterlikci, Robert Morris University ARIF SIRINTERLIKCI received B.S. and M.S. degrees in Mechanical Engineering from Istanbul Tech- nical University, Turkey, and a Ph.D. degree in Industrial and Systems Engineering from the Ohio State University. Currently, he is a Professor of Engineering as well as Co-Head of Research and Outreach Cen- ter at Robert Morris University in Moon Township, Pennsylvania. His teaching and research areas include rapid prototyping and reverse engineering, robotics and automation, bioengineering, and entertainment technology. He has been active in ASEE and SME, serving as an officer of the ASEE Manufacturing Division and SME Bioengineering Tech Group. c American Society for Engineering Education, 2011 Employing Animatronics in Teaching Engineering Design Introduction This paper presents a cross-disciplinary methodology in teaching engineering design, especially product design. The author has utilized this animatronics-based methodology at college and secondary school levels for about a decade. The objective was to engage students in practical and meaningful projects. The result is an active learning environment that is also creative. The methodology was also employed for student recruitment and retention reasons. The effort has spanned two universities and included a senior capstone project1, an honors course2, multiple summer work-shops and camps3,4,5,6,7 as well as an introduction to engineering course. The curriculum encompasses the basics of engineering and product design, and development as well as team work. Students follow the following content sequence and relevant activities through concept development, computer-aided design (CAD), materials and fabrication, rapid prototyping and manufacturing, mechanical design and mechanisms, controls and programming.