6809 Machine Code Programming Also from Granada
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 1 Introduction to Computers, Programs, and Java
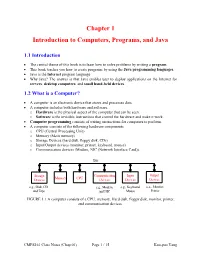
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -
High Performance Decimal Floating-Point Units
UNIVERSIDADE DE SANTIAGO DE COMPOSTELA DEPARTAMENTO DE ELECTRONICA´ E COMPUTACION´ PhD. Dissertation High-Performance Decimal Floating-Point Units Alvaro´ Vazquez´ Alvarez´ Santiago de Compostela, January 2009 To my family A´ mina˜ familia Acknowledgements It has been a long way to see this thesis successfully concluded, at least longer than what I imagined it. Perhaps the moment to thank and acknowledge everyone’s contributions is the most eagerly awaited. This thesis could not have been possible without the support of several people and organizations whose contributions I am very grateful. First of all, I want to express my sincere gratitude to my thesis advisor, Elisardo Antelo. Specially, I would like to emphasize the invaluable support he offered to me all these years. His ideas and contributions have a major influence on this thesis. I would like to thank all people in the Departamento de Electronica´ e Computacion´ for the material and personal help they gave me to carry out this thesis, and for providing a friendly place to work. In particular, I would like to mention to Prof. Javier D. Bruguera and the other staff of the Computer Architecture Group. Many thanks to Paula, David, Pichel, Marcos, Juanjo, Oscar,´ Roberto and my other workmates for their friendship and help. I am very grateful to IBM Germany for their financial support though a one-year research contract. I would like to thank Ralf Fischer, lead of hardware development, and Peter Roth and Stefan Wald, team managers at IBM Deutchland Entwicklung in Boblingen.¨ I would like to extend my gratitude to the FPU design team, in special to Silvia Muller¨ and Michael Kroner,¨ for their help and the warm welcome I received during my stay in Boblingen.¨ I would also like to thank Eric Schwarz from IBM for his support. -

Fully Redundant Decimal Arithmetic
2009 19th IEEE International Symposium on Computer Arithmetic Fully Redundant Decimal Arithmetic Saeid Gorgin and Ghassem Jaberipur Dept. of Electrical & Computer Engr., Shahid Beheshti Univ. and School of Computer Science, institute for research in fundamental sciences (IPM), Tehran, Iran [email protected], [email protected] Abstract In both decimal and binary arithmetic, partial products in multipliers and partial remainders in Hardware implementation of all the basic radix-10 dividers are often represented via a redundant number arithmetic operations is evolving as a new trend in the system (e.g., Binary signed digit [11], decimal carry- design and implementation of general purpose digital save [5], double-decimal [6], and minimally redundant processors. Redundant representation of partial decimal [9]). Such use of redundant digit sets, where products and remainders is common in the the number of digits is sufficiently more than the radix, multiplication and division hardware algorithms, allows for carry-free addition and subtraction as the respectively. Carry-free implementation of the more basic operations that build-up the product and frequent add/subtract operations, with the byproduct of remainder, respectively. In the aforementioned works enhancing the speed of multiplication and division, is on decimal multipliers and dividers, inputs and outputs possible with redundant number representation. are nonredundant decimal numbers. However, a However, conversion of redundant results to redundant representation is used for the intermediate conventional representations entails slow carry partial products or remainders. The intermediate propagation that can be avoided if the results are kept additions and subtractions are semi-redundant in redundant format for later use as operands of other operations in that only one of the operands as well as arithmetic operations. -

Microprocessors History of Computing Nouf Assaid
MICROPROCESSORS HISTORY OF COMPUTING NOUF ASSAID 1 Table of Contents Introduction 2 Brief History 2 Microprocessors 7 Instruction Set Architectures 8 Von Neumann Machine 9 Microprocessor Design 12 Superscalar 13 RISC 16 CISC 20 VLIW 23 Multiprocessor 24 Future Trends in Microprocessor Design 25 2 Introduction If we take a look around us, we would be sure to find a device that uses a microprocessor in some form or the other. Microprocessors have become a part of our daily lives and it would be difficult to imagine life without them today. From digital wrist watches, to pocket calculators, from microwaves, to cars, toys, security systems, navigation, to credit cards, microprocessors are ubiquitous. All this has been made possible by remarkable developments in semiconductor technology enabling in the last 30 years, enabling the implementation of ideas that were previously beyond the average computer architect’s grasp. In this paper, we discuss the various microprocessor technologies, starting with a brief history of computing. This is followed by an in-depth look at processor architecture, design philosophies, current design trends, RISC processors and CISC processors. Finally we discuss trends and directions in microprocessor design. Brief Historical Overview Mechanical Computers A French engineer by the name of Blaise Pascal built the first working mechanical computer. This device was made completely from gears and was operated using hand cranks. This machine was capable of simple addition and subtraction, but a few years later, a German mathematician by the name of Leibniz made a similar machine that could multiply and divide as well. After about 150 years, a mathematician at Cambridge, Charles Babbage made his Difference Engine. -

Historical Perspective and Further Reading 162.E1
2.21 Historical Perspective and Further Reading 162.e1 2.21 Historical Perspective and Further Reading Th is section surveys the history of in struction set architectures over time, and we give a short history of programming languages and compilers. ISAs include accumulator architectures, general-purpose register architectures, stack architectures, and a brief history of ARMv7 and the x86. We also review the controversial subjects of high-level-language computer architectures and reduced instruction set computer architectures. Th e history of programming languages includes Fortran, Lisp, Algol, C, Cobol, Pascal, Simula, Smalltalk, C+ + , and Java, and the history of compilers includes the key milestones and the pioneers who achieved them. Accumulator Architectures Hardware was precious in the earliest stored-program computers. Consequently, computer pioneers could not aff ord the number of registers found in today’s architectures. In fact, these architectures had a single register for arithmetic instructions. Since all operations would accumulate in one register, it was called the accumulator , and this style of instruction set is given the same name. For example, accumulator Archaic EDSAC in 1949 had a single accumulator. term for register. On-line Th e three-operand format of RISC-V suggests that a single register is at least two use of it as a synonym for registers shy of our needs. Having the accumulator as both a source operand and “register” is a fairly reliable indication that the user the destination of the operation fi lls part of the shortfall, but it still leaves us one has been around quite a operand short. Th at fi nal operand is found in memory. -

Algorithms and Architectures for Decimal Transcendental Function Computation
Algorithms and Architectures for Decimal Transcendental Function Computation A Thesis Submitted to the College of Graduate Studies and Research in Partial Fulfillment of the Requirements for the degree of Doctor of Philosophy in the Department of Electrical and Computer Engineering University of Saskatchewan Saskatoon, Saskatchewan, Canada By Dongdong Chen c Dongdong Chen, January, 2011. All rights reserved. Permission to Use In presenting this thesis in partial fulfilment of the requirements for a Postgraduate degree from the University of Saskatchewan, I agree that the Libraries of this University may make it freely available for inspection. I further agree that permission for copying of this thesis in any manner, in whole or in part, for scholarly purposes may be granted by the professor or professors who supervised my thesis work or, in their absence, by the Head of the Department or the Dean of the College in which my thesis work was done. It is understood that any copying or publication or use of this thesis or parts thereof for financial gain shall not be allowed without my written permission. It is also understood that due recognition shall be given to me and to the University of Saskatchewan in any scholarly use which may be made of any material in my thesis. Requests for permission to copy or to make other use of material in this thesis in whole or part should be addressed to: Head of the Department of Electrical and Computer Engineering 57 Campus Drive University of Saskatchewan Saskatoon, Saskatchewan Canada S7N 5A9 i Abstract Nowadays, there are many commercial demands for decimal floating-point (DFP) arith- metic operations such as financial analysis, tax calculation, currency conversion, Internet based applications, and e-commerce. -

Small Computer Monitor User Guide
SmallSmall ComputerComputer MonitorMonitor UserUser GuideGuide Monitor version 1.0 for the Z80 CPU Software and Documentation by Stephen C Cousins Edition 1.0.0 CONTENTS OVERVIEW................................................................................................................4 Conventions....................................................................................................... 4 Serial port.......................................................................................................... 5 LiNC80 systems.................................................................................................. 5 RC2014 systems................................................................................................. 6 COMMANDS..............................................................................................................7 ? or Help............................................................................................................ 7 API function call................................................................................................. 8 Assemble instructions...................................................................................... 10 Baud rate setting............................................................................................. 13 Breakpoint set or clear..................................................................................... 13 Console........................................................................................................... -
Language Translators
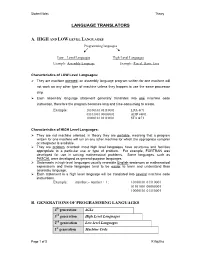
Student Notes Theory LANGUAGE TRANSLATORS A. HIGH AND LOW LEVEL LANGUAGES Programming languages Low – Level Languages High-Level Languages Example: Assembly Language Example: Pascal, Basic, Java Characteristics of LOW Level Languages: They are machine oriented : an assembly language program written for one machine will not work on any other type of machine unless they happen to use the same processor chip. Each assembly language statement generally translates into one machine code instruction, therefore the program becomes long and time-consuming to create. Example: 10100101 01110001 LDA &71 01101001 00000001 ADD #&01 10000101 01110001 STA &71 Characteristics of HIGH Level Languages: They are not machine oriented: in theory they are portable , meaning that a program written for one machine will run on any other machine for which the appropriate compiler or interpreter is available. They are problem oriented: most high level languages have structures and facilities appropriate to a particular use or type of problem. For example, FORTRAN was developed for use in solving mathematical problems. Some languages, such as PASCAL were developed as general-purpose languages. Statements in high-level languages usually resemble English sentences or mathematical expressions and these languages tend to be easier to learn and understand than assembly language. Each statement in a high level language will be translated into several machine code instructions. Example: number:= number + 1; 10100101 01110001 01101001 00000001 10000101 01110001 B. GENERATIONS OF PROGRAMMING LANGUAGES 4th generation 4GLs 3rd generation High Level Languages 2nd generation Low-level Languages 1st generation Machine Code Page 1 of 5 K Aquilina Student Notes Theory 1. MACHINE LANGUAGE – 1ST GENERATION In the early days of computer programming all programs had to be written in machine code. -

Appendix A: Microprocessor Data Sheets
Appendix A: Microprocessor Data Sheets Intel8085 Zilog Z80 MOS Technology 6502 Motorola 6809 Microcontrollers (Single-chip Microcomputers) Intel 8086 ( & 80186 & 80286) Zilog Z8000 Motorola 68000 32-bit Microprocessors lnmos Transputer 184 Appendix A 185 Intel 8085 Followed on from the 8080, which was a two-chip equivalent of the 8085. Not used in any home computers, but was extremely popular in early (late 1970s) industrial control systems. A15-A8 A B c D E Same register AD7-ADO H L set is used in SP 8080 PC ALE Flags Multiplexed d ata bus and lower half of address bus (require 8212 to split data and address buses) Start addresses of Interrupt P/Os Service Routines: 8155- 3 ports, 256 bytes RAM RESET-()()()(J 8255 - 3 ports TRAP- 0024 8355 - 2 ports, 2K ROM RST5.5- 002C 8755 - 2 ports, 2K EPROM RST6.5 - ()(J34 RST7.5- <XJ3C INTR - from interrupting device Other 8251- USART 8202 - Dynamic RAM controller support 8253- CTC (3 counters) 8257 - DMA controller devices: 8271 - FDC 8257 - CRT controller Intel DMA Control System Character CPU buses de-multiplexed Video signal to CRT 186 Microcomputer Fault-finding and Design Zilog Z80 Probably the most popular 8-bit microprocessor. Used in home computers (Spectrum, Amstrad, Tandy), office computers and industrial controllers. A F A' F' B c B' C' D E D' E' H L H' L' 8 data Interrupt Memory lines vector I refresh R Index register IX Index register IY (to refresh dynamic RAMI Stack pointer Based on the Intel 8085, but possesses second set of registers. -

Complete Code Generation from UML State Machine
Complete Code Generation from UML State Machine Van Cam Pham, Ansgar Radermacher, Sebastien´ Gerard´ and Shuai Li CEA, LIST, Laboratory of Model Driven Engineering for Embedded Systems, P.C. 174, Gif-sur-Yvette, 91191, France Keywords: UML State Machine, Code Generation, Semantics-conformance, Efficiency, Events, C++. Abstract: An event-driven architecture is a useful way to design and implement complex systems. The UML State Machine and its visualizations are a powerful means to the modeling of the logical behavior of such an archi- tecture. In Model Driven Engineering, executable code can be automatically generated from state machines. However, existing generation approaches and tools from UML State Machines are still limited to simple cases, especially when considering concurrency and pseudo states such as history, junction, and event types. This paper provides a pattern and tool for complete and efficient code generation approach from UML State Ma- chine. It extends IF-ELSE-SWITCH constructions of programming languages with concurrency support. The code generated with our approach has been executed with a set of state-machine examples that are part of a test-suite described in the recent OMG standard Precise Semantics Of State Machine. The traced execution results comply with the standard and are a good hint that the execution is semantically correct. The generated code is also efficient: it supports multi-thread-based concurrency, and the (static and dynamic) efficiency of generated code is improved compared to considered approaches. 1 INTRODUCTION Completeness: Existing tools and approaches mainly focus on the sequential aspect while the concurrency The UML State Machine (USM) (Specification and of state machines is limitedly supported. -

Chapter 1 Introduction to Computers, Programs, and Java
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers, desktop computers, and small hand-held devices. 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Memory Disk, CD, and Storage Input Keyboard, Tape Devices Devices Mouse CPU Modem, and Communication Output Monitor, NIC Devices Devices Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. • The CPU usually has two components: a control Unit and Arithmetic/Logic Unit. • The control unit coordinates the actions of the other components. • The ALU unit performs numeric operations (+ - / *) and logical operations (comparison). • The CPU speed is measured by clock speed in megahertz (MHz), with 1 megahertz equaling 1 million pulses per second. -
COMMODORE HOTLINE - What's New on the Commodore Scene 1 4
co mmodore COMPUTING international December 1SS2 £1.00 U S A S32.5Q MICROS FOR OPTICIANS CBM 64 MEMORY MAPS NEW BEGINNERS GUIDE WORD PROCESSING LIGHT PEN VICAID VIC Two sets of Fabulous Utilities in one! LIG H TPEN PROGRAMMERS TOOLKIT Gives extra commands: Auto, Number, Help, Delete, Change, DAMS PRICE T race, Step, LightPen, Breaketc. and ONLY MACHINE CODE MONITOR Gives Save, Memory Display, Load, Verify etc. Similar to TIM on PET. + VAT Examine the VICS ROM £ 1 7 .3 5 Needs DAMS RAM/ROM board or similar FOR PET £ 1 9 .9 5 vat 12" SCREEN £ 1 9 .9 5 + VAT VICMON RAM ’N ROM THE ULTIMATE BOARD PROGRAMING AID FOR THE VIC 3K RAM In Hires area. Also space for Full machine code VICAID and package with: VICMON Assembler, Dissassembler, programming aids Fill, Re-locate, Identify, Exchange, Compare, Printing, Dissassembler etc., etc. Needs DAMS RAM/ROM board or similar +VAT £ 1 9 .9 5 + VAT (Includes Cover) BUY THE 3K RAM N ROM BOARD WITH VICAID AND VICMON WITH MACHINE CODE MANUAL (WORTH £5.00) FROM MOS TECHNOLOGY FOR ONLY £67.85 + VAT AND GET A FREE VIC LIGHT PEN (WORTH £17.35) VIC REFERENCE GUIDE R.R.P. £14.95 DAMS PRICE £14.50 VIC STARTER KIT VIC 20 C2N Cassette Deck, 10 Blank Cassettes, User Manual, Vic Programmers Reference Guide, ANTIGLARE 1 Joystick. Worth£238.30 ONLY«^0 4 m A A SCREENS FOR PET L Z 1 4 . U U +v a t 40 Column (VAT INCL. PRICE = £244.62) £17.95 80 Column OR VIC 20 With free 3K RAM pack or £19.95 Super Cartridge Game ONLY £173.83 ALL PRICES PLUS VAT VDU VIEW THRU + VAT ACCESS & DAMS BUSINESS COMPUTERS LTD.