Complete Code Generation from UML State Machine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 1 Introduction to Computers, Programs, and Java
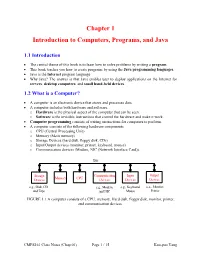
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • The central theme of this book is to learn how to solve problems by writing a program . • This book teaches you how to create programs by using the Java programming languages . • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers , desktop computers , and small hand-held devices . 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Computer programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Bus Storage Communication Input Output Memory CPU Devices Devices Devices Devices e.g., Disk, CD, e.g., Modem, e.g., Keyboard, e.g., Monitor, and Tape and NIC Mouse Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. CMPS161 Class Notes (Chap 01) Page 1 / 15 Kuo-pao Yang 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. -

EB GUIDE Documentation Version 6.1.0.101778 EB GUIDE Documentation
EB GUIDE documentation Version 6.1.0.101778 EB GUIDE documentation Elektrobit Automotive GmbH Am Wolfsmantel 46 D-91058 Erlangen GERMANY Phone: +49 9131 7701-0 Fax: +49 9131 7701-6333 http://www.elektrobit.com Legal notice Confidential and proprietary information. ALL RIGHTS RESERVED. No part of this publication may be copied in any form, by photocopy, microfilm, retrieval system, or by any other means now known or hereafter invented without the prior written permission of Elektrobit Automotive GmbH. ProOSEK®, tresos®, and street director® are registered trademarks of Elektrobit Automotive GmbH. All brand names, trademarks and registered trademarks are property of their rightful owners and are used only for description. Copyright 2015, Elektrobit Automotive GmbH. Page 2 of 324 EB GUIDE documentation Table of Contents 1. About this documentation ................................................................................................................ 15 1.1. Target audiences of the user documentation ......................................................................... 15 1.1.1. Modelers .................................................................................................................. 15 1.1.2. System integrators .................................................................................................... 16 1.1.3. Application developers ............................................................................................... 16 1.1.4. Extension developers ............................................................................................... -
UML 2 Toolkit, Penker Has Also Collaborated with Hans- Erik Eriksson on Business Modeling with UML: Business Practices at Work
UML™ 2 Toolkit Hans-Erik Eriksson Magnus Penker Brian Lyons David Fado UML™ 2 Toolkit UML™ 2 Toolkit Hans-Erik Eriksson Magnus Penker Brian Lyons David Fado Publisher: Joe Wikert Executive Editor: Bob Elliott Development Editor: Kevin Kent Editorial Manager: Kathryn Malm Production Editor: Pamela Hanley Permissions Editors: Carmen Krikorian, Laura Moss Media Development Specialist: Travis Silvers Text Design & Composition: Wiley Composition Services Copyright 2004 by Hans-Erik Eriksson, Magnus Penker, Brian Lyons, and David Fado. All rights reserved. Published by Wiley Publishing, Inc., Indianapolis, Indiana Published simultaneously in Canada No part of this publication may be reproduced, stored in a retrieval system, or transmitted in any form or by any means, electronic, mechanical, photocopying, recording, scanning, or otherwise, except as permitted under Section 107 or 108 of the 1976 United States Copyright Act, without either the prior written permission of the Publisher, or authorization through payment of the appropriate per-copy fee to the Copyright Clearance Center, Inc., 222 Rose- wood Drive, Danvers, MA 01923, (978) 750-8400, fax (978) 646-8700. Requests to the Pub- lisher for permission should be addressed to the Legal Department, Wiley Publishing, Inc., 10475 Crosspoint Blvd., Indianapolis, IN 46256, (317) 572-3447, fax (317) 572-4447, E-mail: [email protected]. Limit of Liability/Disclaimer of Warranty: While the publisher and author have used their best efforts in preparing this book, they make no representations or warranties with respect to the accuracy or completeness of the contents of this book and specifically disclaim any implied warranties of merchantability or fitness for a particular purpose. -

UML Profile for Communicating Systems a New UML Profile for the Specification and Description of Internet Communication and Signaling Protocols
UML Profile for Communicating Systems A New UML Profile for the Specification and Description of Internet Communication and Signaling Protocols Dissertation zur Erlangung des Doktorgrades der Mathematisch-Naturwissenschaftlichen Fakultäten der Georg-August-Universität zu Göttingen vorgelegt von Constantin Werner aus Salzgitter-Bad Göttingen 2006 D7 Referent: Prof. Dr. Dieter Hogrefe Korreferent: Prof. Dr. Jens Grabowski Tag der mündlichen Prüfung: 30.10.2006 ii Abstract This thesis presents a new Unified Modeling Language 2 (UML) profile for communicating systems. It is developed for the unambiguous, executable specification and description of communication and signaling protocols for the Internet. This profile allows to analyze, simulate and validate a communication protocol specification in the UML before its implementation. This profile is driven by the experience and intelligibility of the Specification and Description Language (SDL) for telecommunication protocol engineering. However, as shown in this thesis, SDL is not optimally suited for specifying communication protocols for the Internet due to their diverse nature. Therefore, this profile features new high-level language concepts rendering the specification and description of Internet protocols more intuitively while abstracting from concrete implementation issues. Due to its support of several concrete notations, this profile is designed to work with a number of UML compliant modeling tools. In contrast to other proposals, this profile binds the informal UML semantics with many semantic variation points by defining formal constraints for the profile definition and providing a mapping specification to SDL by the Object Constraint Language. In addition, the profile incorporates extension points to enable mappings to many formal description languages including SDL. To demonstrate the usability of the profile, a case study of a concrete Internet signaling protocol is presented. -
Language Translators
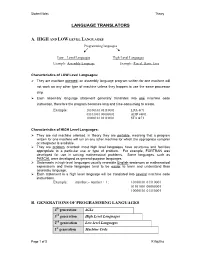
Student Notes Theory LANGUAGE TRANSLATORS A. HIGH AND LOW LEVEL LANGUAGES Programming languages Low – Level Languages High-Level Languages Example: Assembly Language Example: Pascal, Basic, Java Characteristics of LOW Level Languages: They are machine oriented : an assembly language program written for one machine will not work on any other type of machine unless they happen to use the same processor chip. Each assembly language statement generally translates into one machine code instruction, therefore the program becomes long and time-consuming to create. Example: 10100101 01110001 LDA &71 01101001 00000001 ADD #&01 10000101 01110001 STA &71 Characteristics of HIGH Level Languages: They are not machine oriented: in theory they are portable , meaning that a program written for one machine will run on any other machine for which the appropriate compiler or interpreter is available. They are problem oriented: most high level languages have structures and facilities appropriate to a particular use or type of problem. For example, FORTRAN was developed for use in solving mathematical problems. Some languages, such as PASCAL were developed as general-purpose languages. Statements in high-level languages usually resemble English sentences or mathematical expressions and these languages tend to be easier to learn and understand than assembly language. Each statement in a high level language will be translated into several machine code instructions. Example: number:= number + 1; 10100101 01110001 01101001 00000001 10000101 01110001 B. GENERATIONS OF PROGRAMMING LANGUAGES 4th generation 4GLs 3rd generation High Level Languages 2nd generation Low-level Languages 1st generation Machine Code Page 1 of 5 K Aquilina Student Notes Theory 1. MACHINE LANGUAGE – 1ST GENERATION In the early days of computer programming all programs had to be written in machine code. -

Chapter 1 Introduction to Computers, Programs, and Java
Chapter 1 Introduction to Computers, Programs, and Java 1.1 Introduction • Java is the Internet program language • Why Java? The answer is that Java enables user to deploy applications on the Internet for servers, desktop computers, and small hand-held devices. 1.2 What is a Computer? • A computer is an electronic device that stores and processes data. • A computer includes both hardware and software. o Hardware is the physical aspect of the computer that can be seen. o Software is the invisible instructions that control the hardware and make it work. • Programming consists of writing instructions for computers to perform. • A computer consists of the following hardware components o CPU (Central Processing Unit) o Memory (Main memory) o Storage Devices (hard disk, floppy disk, CDs) o Input/Output devices (monitor, printer, keyboard, mouse) o Communication devices (Modem, NIC (Network Interface Card)). Memory Disk, CD, and Storage Input Keyboard, Tape Devices Devices Mouse CPU Modem, and Communication Output Monitor, NIC Devices Devices Printer FIGURE 1.1 A computer consists of a CPU, memory, Hard disk, floppy disk, monitor, printer, and communication devices. 1.2.1 Central Processing Unit (CPU) • The central processing unit (CPU) is the brain of a computer. • It retrieves instructions from memory and executes them. • The CPU usually has two components: a control Unit and Arithmetic/Logic Unit. • The control unit coordinates the actions of the other components. • The ALU unit performs numeric operations (+ - / *) and logical operations (comparison). • The CPU speed is measured by clock speed in megahertz (MHz), with 1 megahertz equaling 1 million pulses per second. -

What Is a Computer Program? 1 High-Level Vs Low-Level Languages
What Is A Computer Program? Scientific Computing Fall, 2019 Paul Gribble 1 High-level vs low-level languages1 2 Interpreted vs compiled languages3 What is a computer program? What is code? What is a computer language? A computer program is simply a series of instructions that the computer executes, one after the other. An instruction is a single command. A program is a series of instructions. Code is another way of referring to a single instruction or a series of instructions (a program). 1 High-level vs low-level languages The CPU (central processing unit) chip(s) that sit on the motherboard of your computer is the piece of hardware that actually executes instructions. A CPU only understands a relatively low-level language called machine code. Often machine code is generated automatically by translating code written in assembly language, which is a low-level programming language that has a relatively direcy relationship to machine code (but is more readable by a human). A utility program called an assembler is what translates assembly language code into machine code. In this course we will be learning how to program in MATLAB, which is a high-level programming language. The “high-level” refers to the fact that the language has a strong abstraction from the details of the computer (the details of the machine code). A “strong abstraction” means that one can operate using high-level instructions without having to worry about the low-level details of carrying out those instructions. An analogy is motor skill learning. A high-level language for human action might be drive your car to the grocery store and buy apples. -

Mutating UML State Machine Behavior with Semantic Mutation Operators
Mutating UML State Machine Behavior with Semantic Mutation Operators Anna Derezinska a and Łukasz Zaremba Institute of Computer Science, Warsaw University of Technology, Nowowiejska 15/19, Warsaw, Poland Keywords: Model-Driven Software Development, State Machine, Code Generation, Mutation Testing, Framework for Executable UML (FXU), C#. Abstract: In Model-Driven Software Development (MDSD), an application can be built using classes and their state machines as source models. The final application can be tested as any source code. In this paper, we discuss a specific approach to mutation testing in which modifications relate to different variants of behavioural features modelled by UML state machines, while testing deals with standard executions of the final application against its test cases. We have proposed several mutation operators aimed at mutating behaviour of UML state machines. The operators take into account event processing, time management, behaviour of complex states with orthogonal regions, and usage of history pseudostates. Different possible semantic interpretations are associated with each operator. The operators have been implemented in the Framework for eXecutable UML (FXU). The framework, that supports code generation from UML classes and state machines and building target C# applications, has been extended to realize mutation testing with use of multiple libraries. The semantic mutation operators have been verified in some MDSD experiments. 1 INTRODUCTION satisfying selected criteria (Jia and Harman, 2011). In a standard mutation testing process, syntactic Model-Driven Software Development (MDSD) can changes, so-called mutations, are injected into a be aimed at production of high quality software in a source code and supposed to be detected by test cases. -

Chapter 1 Basic Principles of Programming Languages
Chapter 1 Basic Principles of Programming Languages Although there exist many programming languages, the differences among them are insignificant compared to the differences among natural languages. In this chapter, we discuss the common aspects shared among different programming languages. These aspects include: programming paradigms that define how computation is expressed; the main features of programming languages and their impact on the performance of programs written in the languages; a brief review of the history and development of programming languages; the lexical, syntactic, and semantic structures of programming languages, data and data types, program processing and preprocessing, and the life cycles of program development. At the end of the chapter, you should have learned: what programming paradigms are; an overview of different programming languages and the background knowledge of these languages; the structures of programming languages and how programming languages are defined at the syntactic level; data types, strong versus weak checking; the relationship between language features and their performances; the processing and preprocessing of programming languages, compilation versus interpretation, and different execution models of macros, procedures, and inline procedures; the steps used for program development: requirement, specification, design, implementation, testing, and the correctness proof of programs. The chapter is organized as follows. Section 1.1 introduces the programming paradigms, performance, features, and the development of programming languages. Section 1.2 outlines the structures and design issues of programming languages. Section 1.3 discusses the typing systems, including types of variables, type equivalence, type conversion, and type checking during the compilation. Section 1.4 presents the preprocessing and processing of programming languages, including macro processing, interpretation, and compilation. -

User's Guide and Reference
IBM Compiler and Library for REXX on IBM Z Version 1 Release 4 User’s Guide and Reference IBM SH19-8160-06 Note Before using this information and the product it supports, be sure to read the general information under Appendix G, “Notices,” on page 267. Seventh Edition, August 2013 This edition applies to version 1 release 4 of IBM Compiler for REXX on IBM Z (product number 5695-013) and the IBM Library for REXX on IBM Z (product number 5695-014), and to all subsequent releases and modifications until otherwise indicated in new editions. This edition replaces SH19-8160-04. © Copyright International Business Machines Corporation 1991, 2013. US Government Users Restricted Rights – Use, duplication or disclosure restricted by GSA ADP Schedule Contract with IBM Corp. Contents About This Book..................................................................................................xix How to Read the Syntax Notation............................................................................................................. xix How This Book Is Organized..................................................................................................................... xix How to Send Your Comments.................................................................................................................... xx What's New in Release 4..................................................................................... xxi IBM Compiler for REXX on IBM Z..............................................................................................................xxi -

Virtual Machines for Dynamic Languages Ausgewählte Kapitel Der Systemsoftwaretechnik, WS2021
Virtual Machines for Dynamic Languages Ausgewählte Kapitel der Systemsoftwaretechnik, WS2021 Mark Deutel Friedrich-Alexander-University Erlangen-Nürnberg (FAU) Erlangen, Germany [email protected] ABSTRACT threading model. It is common that once a dynamic language has A common approach to execute dynamic languages is inside a vir- grown popular enough the interpreter is extended by a just-in-time tual machine (VM), usually implemented in a low level system (JIT) compiler to more efficiently execute interpreted code. language like C. Such VMs have to support the often complex However this approach does not come without problems. The syntax and semantics of the dynamic languages they are hosting. effort required to write a complete virtual machine from scratch Additionally, some properties of dynamic language code can only is huge. It also forces the language implementer to deal with plat- be inferred at runtime making the optimization of code execution form or target architecture specific details. This makes implement- another challenging task. Therefore, it is hardly possible to provide ing a VM time consuming, error prone, and complicated to port general purpose implementations that support a large range of to other systems. Additionally, modern dynamic languages like different dynamic languages. Furthermore, many commonly used Python, Ruby or JavaScript evolve rapidly and have complex syn- dynamic languages such as Python or Javascript are still evolving tax and semantics. This not only makes it hard to represent the which means that their VMs have to adapt constantly. This implies language properly in low level code, but makes maintenance of that it is necessary to write and maintain a sufficiently elaborated existing VM implementations a complicated task as well. -

SDL - the Iot Language Edel Sherratt, Ileana Ober, Emmanuel Gaudin, Pau Fonseca I Casas, Finn Kristoffersen
SDL - the IoT Language Edel Sherratt, Ileana Ober, Emmanuel Gaudin, Pau Fonseca I Casas, Finn Kristoffersen To cite this version: Edel Sherratt, Ileana Ober, Emmanuel Gaudin, Pau Fonseca I Casas, Finn Kristoffersen. SDL - the IoT Language. 17th International System Design Languages Forum (SDL 2015), Oct 2015, Berlin, Germany. pp. 27-41. hal-01332271 HAL Id: hal-01332271 https://hal.archives-ouvertes.fr/hal-01332271 Submitted on 15 Jun 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Open Archive TOULOUSE Archive Ouverte ( OATAO ) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where po ssible. This is an author-deposited version published in : http://oatao.univ-toulouse.fr/ Eprints ID : 15419 The contribution was presented at SDL 2015 : http://sdl-forum.org/Events/ To cite this version : Sherratt, Edel and Ober, Ileana and Gaudin, Emmanuel and Fonseca I Casas, Pau and Kristoffersen, Finn SDL - the IoT Language. (2015) In: 17th International System Design Languages Forum (SDL 2015), 12 October 2015 - 14 October 2015 (Berlin, Germany). Any corresponde nce concerning this service should be sent to the repository administrator: staff -oatao@listes -diff.inp -toulouse.fr SDL - the IoT Language Edel Sherratt 1, Ileana Ober 2, Emmanuel Gaudin 3, Pau Fonseca i Casas 4, and Finn Kristoffersen 5 1 Aberystwyth University 2 IRIT, Universit´ePaul Sabatier 3 PragmaDev SARL 4 Universitat Polit`ecnica de Catalunya 5 Cinderella ApS Abstract.