The Effects of the Joint Multi-Mission Electro-Optical System on Littoral Maritime Intelligence, Surveillance, and Reconnaissance Operations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2016 NAVAL SUBMARINE LEAGUE CORPORATE MEMBERS 5 STAR LEVEL Bechtel Nuclear, Security & Environmental (BNI) (New in 2016) BWX Technologies, Inc
NAVAL SUBMARINE LEAGUE TH 34 ANNUAL SYMPOSIUM SPONSORS L-3 COMMUNICATIONS NEWPORT NEWS SHIPBUILDING-A DIVISION OF HUNTINGTON INGALLS INDUSTRIES GENERAL DYNAMICS—ELECTRIC BOAT GENERAL DYNAMICS—MISSION SYSTEMS HUNT VALVE COMPANY, INC. LOCKHEED MARTIN CORPORATION NORTHROP GRUMMAN NAVIGATION & MARITIME SYSTEMS DIVISION RAYTHEON COMPANY AECOM MANAGEMENT SERVICES GROUP BAE SYSTEMS BWX TECHNOLOGIES, INC. CURTISS-WRIGHT CORPORATION DRS TECHNOLOGIES, MARITIME AND COMBAT SUPPORT SYSTEMS PROGENY SYSTEMS, INC. TREADWELL CORPORATION TSM CORPORATION ADVANCED ACOUSTIC CONCEPTS BATTELLE BOEING COMPANY BOOZ ALLEN HAMILTON CEPEDA ASSOCIATES, INC. CUNICO CORPORATION & DYNAMIC CONTROLS, LTD. GENERAL ATOMICS IN-DEPTH ENGINEERING, INC. OCEANEERING INTERNATIONAL, INC. PACIFIC FLEET SUBMARINE MEMORIAL ASSOC., INC. SONALYSTS, INC. SYSTEMS PLANNING AND ANALYSIS, INC. ULTRA ELECTRONICS 3 PHOENIX ULTRA ELECTRONICS—OCEAN SYSTEMS, INC. 1 2016 NAVAL SUBMARINE LEAGUE WELCOME TO THE 34TH ANNUAL SYMPOSIUM TABLE OF CONTENTS SYMPOSIUM SPEAKERS BIOGRAPHIES ADM FRANK CALDWELL, USN ................................................................................ 4 VADM JOSEPH TOFALO, USN ................................................................................... 5 RADM MICHAEL JABALEY, USN ............................................................................. 6 MR. MARK GORENFLO ............................................................................................... 7 VADM JOSEPH MULLOY, USN ................................................................................. -

Naval Construction and Engineering Ship Design and Technology Symposium
Naval Construction and Engineering Ship Design and Technology Symposium Wednesday, May 14, 2008 MIT Faculty Club, 50 Memorial Drive, Building E52-Sixth Floor 0800 – 0900 Registration and continental breakfast 0900 – 0910 Administrative information – Captain Patrick Keenan, USN 0910 – 0920 Welcome – Professor Rohan Abeyaratne, Department Head, Mechanical Engineering, MIT 0920 – 0930 Opening Remarks – Professor Nicholas Patrikalakis, Associate Department Head, Mechanical Engineering, MIT 0930 – 1000 Composite Materials and NDE – Professor James Williams, Jr., MIT 1000 – 1030 Alternative Selection through Pugh Analysis – Professor Daniel Frey, MIT 1030 – 1045 Break 1045 – 1105 DDG-51 to LCS Mission Module Carrier (Conversion) – LCDR Kevin Flood, USN, LCDR(s) Chris Peterson, USN, LCDR(s) Rocky Beaver, USN 1105 – 1125 LSD-41 to Ballistic Missile Test & Evaluation Platform (Conversion) – LCDR Greg Elkins, USN, LCDR Jeremy Leghorn, USN, LT Joe Darcy, USN 1125 – 1145 FFG-7 to LCS Mission Module Carrier (Conversion) – CDR Mitch Stubblefield, USN, LCDR Keith Douglas, USN, LCDR Joshua LaPenna, USN 1145 – 1205 LSD-41 to Hospital/Naval Construction Ship (Conversion) – LTJG Matt Smith, USCG, LT Simon Summers, CF, LTJG Alexandros Michelis, HN 1205 – 1315 Luncheon Buffet – Guest Speaker: Rear Admiral Mark Hugel, USN, Deputy Commander for Logistics, Maintenance and Industrial Operations, Naval Sea Systems Command 1215– 1235 Design of a Fast Catamaran Semi-Displacement Vessel – Julie Arsenault, Ashley Cantieny, Edward Huo, Morgan Laidlaw, Sebastian Sovero -

Patrol Craft Sailors Association
PATROL CRAFT SAILORS ASSOCIATION COLLECTION & ARCHIVES List reflects both artifacts and research materials contained in the PCSA Collection and Archives by topic and/or ship number PATROL CRAFT SAILORS ASSOCIATION (PCSA) Media - General Media - Video Official Documents & Correspondence PCSA Endowment Fund PCSA Library Dedication PCSA Gallery Openings PCSA Newsletter Directories PCSA Reunion Directories Photographs-General Color/B & W Plaques & Commendations UNITED STATES NAVY (GENERAL) Media – General Flags & Pennants NATO Phonetic Alphabet History/Traditions/Lore Official Manuals/Posters/Publications Photographs-General (Color/B & W) Role of Women & Minorities (WWI to Present) Uniforms/Ratings/Insignia U.S. Navy Nurse Corps U.S. Navy WAVES U.S. Naval Historical Center U.S. Navy Memorial/Heritage Center WW I - EAGLE CLASS PATROL CRAFT Eagle Boat- General PE 2 PE 26 PE 35 PE 48 PE 54 PE 58 PE 59 PE 60 WORLD WAR II (GENERAL) Books & Other Publications Daily Life/Personal Stories & Related Maps & Charts Media – General Photographs-General (Color/B & W) The Selective Training and Service Act of 1940 The Servicemen’s Readjustment Act of 1944 WII Bay County/Bay City U-Boats – General WORLD WAR II - PATROL CRAFT (GENERAL) Blueprints & Drawings Books & Other Publications Commissioning/Launching/Change of Command/Sponsors Communication & Navigation Mechanical & Technical Media - General Photographs-General (Color/B & W) KOREAN WAR Korean War – General Patrol Craft- General VIETNAM WAR Vietnam War - General Groups & Organizations - General Vietnam Veterans of America Brown Water Navy-General Maps/ Charts/Posters Books & Other Publications Photographs –General (Color/B& W) PBR/PCF/WPB - General Riverine Forces - General Coastal Surveillance Force/Task Force 115 River Force Patrol/Task Force 116 Mobile Riverine Force/Task Force 117 U.S. -

Key US Aircraft and Ships for Strikes on Iraq
CSIS_______________________________ Center for Strategic and International Studies 1800 K Street N.W. Washington, DC 20006 (202) 775-3270 Key US Aircraft and Ships for Strikes on Iraq Anthony H. Cordesman CSIS Middle East Dynamic Net Assessment February 16, 1998 Copyright Anthony H. Cordesman, all rights reserved. Key US Ships and Aircraft for Strikes on Iraq 3/2/98 Page 2 Table of Contents TABLE OF CONTENTS..................................................................................................................................... 2 F-15 EAGLE ........................................................................................................................................................ 4 BACKGROUND .................................................................................................................................................. 5 F-16 FIGHTING FALCON................................................................................................................................. 7 FEATURES.......................................................................................................................................................... 7 BACKGROUND...................................................................................................................................................... 7 B-1B LANCER..................................................................................................................................................... 9 MISSION............................................................................................................................................................. -
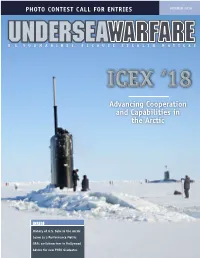
Advancing Cooperation and Capabilities in the Arctic
PHOTO CONTEST CALL FOR ENTRIES SUMMER 2018 U. S. SUBMARINES … B ECAUSE STEALTH MATTERS ICEX ‘18 Advancing Cooperation and Capabilities in the Arctic INSIDE History of U.S. Subs in the Arctic Leave as a Performance Metric Q&A: ex-Submariner in Hollywood Advice for new PNEO Graduates U. S. SUBMARINES … B ECAUSE STEALTH MATTERS THE OFFiciaL MAGAZINE OF THE U.S. SUBMARINE Force FORCE COMMANDER’S CORNER ICEX ‘18 Vice Adm. Joseph E. Tofalo, USN Commander, Submarine Forces Summer 2018 4 Advancing Cooperation and 65 Capabilities in the Arctic o. N Arctic Exercises ssue I 4 by Lt. Courtney Callaghan, CSS-11 PAO, Mr. Theo Goda, Joseph Hardy and Larry Estrada, Arctic Submarine Lab Undersea Warriors, Sixty Years of U.S. Submarines in the Arctic 8 by Lt. Cmdr. Bradley Boyd, Officer in Charge, Historic Ship Nautilus As my three-year tenure as Commander, Submarine Forces draws to a close, I want you all to know that it has been Director, Submarine Force Museum the greatest privilege of my career to be your Force Commander. It has been an honor to work with the best people on the best warships supported by the best families! 8 10 Operation Sunshine For much of the last century, we really only had one main competitor on which to focus. We are now in a world by Lt. Cmdr. Bradley Boyd, Officer in Charge, Historic Ship Nautilus where we not only have two near-peer competitors with which to contend, but also three non-near-peer adversaries Director, Submarine Force Museum that challenge us as well—overall a much broader field. -

Airpower Journal: Spring 1993, Volume VII, No. 1
Air Force Chief of Staíf Gen Merrill A. McPeak Commander, Air University Lt Gen }ay W. Kelley Commander, Center for Aerospace Doctrine, Research, and Education Col Gary A. Voellger Editor Lt Col Richard B. Clark Associate Editor Maj Gwendolyn D. Fayne Professional Staff Hugh Richardson, Contributing Editor Marvin W. Bassett, Contributing Editor Steven C. Garst, Director of Art and Production Daniel M. Armstrong, Ulustrator Thomas L. Howell, Prepress Production Manager The Airpower Journal, published quarterly, is the professional journal of the United States Air Force. It is designed to serve as an open forum for presenting and stimulating innovative think- ing on militáry doctrine, strategy, tactics, force structure, readiness, and other national defense matters. The views and opinions expressed or implied in the Journal are those of the authors and should not be construed as carrying the official sanction of the Department of Defense, the Air Force, Air University, or other agencies or departments of the US government. Articles in this edition may be reproduced in whole or in part without permission. If repro- duced, the Airpower Journal requests a cour- tesy line. JOURNAL Sprlng 1993, Vol. VII. No. I AFRP 50-2 Editorial 2 The “Staff Experience” and Leadership Development Gen John A. Shaud, USAF, Retired 4 The Operational Levei of Nuclear War Fighting: Missing or Unnecessary? Dr Steven Metz 13 The Douhet Society: A Recipe for Your Professional Development Program? Lt Col Kimble D. Stohry, USAF 21 One Target, One Bomb: Is the Principie of Mass Dead? Lt Col Edward Mann, USAF 35 Disabling Systems: War-Fighting Option for the Future Lt Col Alan W. -
Vol. 8, No. 8 August 2012 United States Submarine Veterans - Charleston Base Newsletter
Vol. 8, No. 8 August 2012 United States Submarine Veterans - Charleston Base Newsletter USSVI Creed “To perpetuate the memory of our shipmates who gave their lives in the pursuit of their duties while serving their country. That their dedication, deeds, and supreme sacrifice be a constant source of motivation toward greater accomplishments. Pledge loyalty and patriotism to the United States of America and its Constitution” Base Meeting: Special Officers Click to email Phone Number August 9, 2012 Social hour 1800 General Meeting 1900 Chief of the Boat Rick Sparger 843-553-5594 Location: Public Affairs Larry Starland 843 863-8474 Fleet Reserve Association Branch 269 Veterans Affairs Jim Morrison 843-832-9716 Low Country Home 99 Wisteria Rd. Chaplain John Nichols 843-452-3189 Goose Creek, South Carolina. Phone 843-569-2962 Membership Carl Chinn 843-875-3098 Holland Club John Lookabill 843-797-2991 Base Officers Click to email Phone Number Scholarship Julian Villegas 843-871-6135 Commander Carl Chinn 843-875-3098 Newsletter Steve Morawiec 843-410-0131 Vice Commander Jerry Stout 843-871-9533 Storekeeper Ken Hutchison 843-553-0935 Secretary Theron Irving 843-817-5118 Webmaster John Nichols 843-452-3189 Treasurer Terry Trump 843-873-9563 Historian George Scharf 843 873-3318 Minutes of the July 2012 meeting Secretary : Asked for a motion to accept the minutes as published in the newsletter. Seconded Attendance for the June, 2012 meeting was 99. and the motion was carried. Opening Ceremony : Base Commander Carl Treasurer : Terry gave report for the month of Chin called the meeting to order. -

Bach, John OH40
Wisconsin Veterans Museum Research Center Transcript of an Oral History Interview with JOHN L. BACH United States Coast Guard Seaman in WWII 1994 OH 2 40 OH 40 Bach, John L., (1920-2003). Oral history interview, 1994. User Copy: 2 sound cassettes (c.a. 84 min.), analog, 1 7/8 ips, mono. Master Copy: 1 sound cassette (c.a. 84 min), analog, 1 7/8 ips. mono. Abstract Bach, a Madison, Wis. native, discusses his service in the United States Coast Guard as a sonarman during World War II. As a sonarman Bach relates information about sonar technology as well as imparts information relating to military life. He recounts training at Curtis Bay (Maryland) and sonar school (Key West, Florida) including the development of new training courses, creation of insignia, shipboard equipment shortages, and other difficulties incurred while expanding the military. Serving aboard the Thetis, a patrol boat that escorted convoys along the East Coast, he relates his shipboard role, coastal encounters with German submarines, and the basic nature of the sonar technology. Bach offers a unique perspective on the World War II home-front, since his home port was the Brooklyn Naval Yard, he discusses rationing and treatment of servicemen. Transferred to the Navy 107 base in Argentia (Newfoundland) he comments on convoy escort, race relations within the Navy and Coast Guard, USO shows, alcohol consumption on the base, and depression among servicemen. Bach mentions behavior at exotic ports and gays in the military. Bach also discusses his discharge process, return to Madison, Wis. and civilian life, membership in the American Legion, and differences between World War I and II veterans. -

Download Your Copy of the 2021 Ships and Submarines of The
Aircraft Carrier Submarine Amphibious Multi-Purpose Aircraft Carrier (Nuclear-Propulsion) Submarine (Nuclear-Powered) Amphibious Assault Ship Gerald R Ford Class CVN Los Angeles Class SSN America Class LHA USS Gerald R Ford CVN-78 USS Olympia SSN-717 USS Pasadena SSN-752 USS Jefferson City SSN-759 USS Montpelier SSN-765 USS America LHA-6 John F Kennedy CVN-79 USS Providence SSN-719 USS Albany SSN-753 USS Annapolis SSN-760 USS Charlotte SSN-766 USS Tripoli LHA-7 Enterprise CVN-80 USS Chicago SSN-721 USS Topeka SSN-754 USS Springfield SSN-761 USS Hampton SSN-767 Bougainville LHA-8 Doris Miller CVN-81 USS Key West SSN-722 USS Scranton SSN-756 USS Columbus SSN-762 USS Hartford SSN-768 USS Oklahoma City SSN-723 USS Alexandria SSN-757 USS Santa Fe SSN-763 USS Toledo SSN-769 USS Louisville SSN-724 USS Asheville SSN-758 USS Boise SSN-764 USS Tucson SSN-770 USS Helena SSN-725 USS Columbia SSN-771 USS Newport News SSN-750 USS Greeneville SSN-772 USS San Juan SSN-751 USS Cheyenne SSN-773 Nimitz Class CVN USS Nimitz CVN-68 USS George Washington CVN-73 Seawolf Class SSN Wasp Class LHD USS Dwight D Eisenhower CVN-69 USS John C Stennis CVN-74 USS Wasp LHD-1 USS Bataan LHD-5 USS Carl Vinson CVN-70 USS Harry S Truman CVN-75 USS Seawolf SSN-21 USS Essex LHD-2 USS Iwo Jima LHD-7 USS Theodore Roosevelt CVN-71 USS Ronald Reagan CVN-76 USS Connecticut SSN-22 USS Kearsarge LHD-3 USS Makin Island LHD-8 USS Abraham Lincoln CVN-72 USS George HW Bush CVN-77 USS Jimmy Carter SSN-23 USS Boxer LHD-4 Virginia Class SSN USS Virginia SSN-774 USS Minnesota SSN-783 USS -
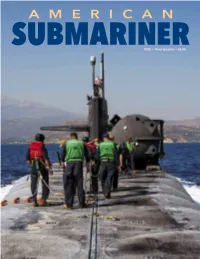
2020 • Third Quarter • $6.00
2020 • Third Quarter • $6.00 Third Quarter 2020 | American Submariner | 1 You served your country with honor and loyalty. Now, let us serve you. Asbestos widely used throughout submarines endangered everyone aboard. As crew members spent long periods confined in the vessel, asbestos fibers re-circulated throughout the ship, significantly increasing every crew members’ risk of deadly Mesothelioma. At Waters Kraus & Paul, our lawyers have represented veterans for over 20 years. We have the research to identify where your exposure to asbestos occurred. Our team is dedicated to helping submariner vets and their families receive immediate help and compensation. Call us at 800-226-9880 to learn more. Helping Veterans for Over 20 Years Waters Kraus & Paul: 800-226-9880 222 N Pacific Coast Highway Suite 1900 El Segundo, California 90245 C. Andrew Waters is the attorney responsible for this advertisement Los Angeles | Dallas | Baton Rouge | Moline (by appt.) | waterskrauspaul.com 2 | American Submariner | Third Quarter 2020 Third Quarter 2020 | American Submariner | 3 AMERICAN SUBMARINER THE The Official Magazine of the United States Submarine Veterans Inc. is published quarterly VIEW FROM THE BRIDGE by USSVI. United States Submarine Veterans Inc. is a nonprofit 501(c)(19) corporation in the State Wayne Standerfer of Connecticut. Contents National Commander NATIONAL OFFICE Fred Borgmann POB 3870 Silverdale, WA 98383 (877) 542-DIVE 8 USSVI Charitable Foundation Quarterly Report USSVI COMMITTEES Boat Model Giveaway Winner Announced Shipmates, MEMBERSHIP Anyone of us that has been a member of USSVI for any length of time recognizes Steve Bell, NJVC 11 USS Hyman G. Rickover (SSN-795): that our bases are where almost everything in USSVI starts, stalls or stops. -

Summer-2019.Pdf
PHOTO CONTEST CALL FOR ENTRIES SUMMER 2019 U. S. SUBMARINES … B ECAUSE STEALTH MATTERS Training: Preparing for Tomorrow’s High-End Conflict INSIDE Tackling Your JO Tour 2018 JOOYs Hit D.C. Cool Tech Making Training Easier Turning Innovation Into Reality U. S. SUBMARINES … B ECAUSE STEALTH MATTERS THE OFFICIAL MAGAZINE OF THE U.S. SUBMARINE FORCE FORCE COMMANDER’S CORNER Training: Vice Adm. Charles A. Richard, USN Commander, Submarine Forces Summer 2019 4 Preparing for Tomorrow’s 68 o. N High-End Conflict ssue I Undersea Warriors, Strategic Innovation from the Deckplate 4 by Cmdr. Bennett Christman and Lt. Cmdr. Ryan Hilger In the last edition of UNDERSEA WARFARE Magazine, we talked about our progress toward instilling a warfighting culture in everything we do. I highlighted our use of competition to drive innovation, our standup of the Aggressor Taking Modern Learning Technology to New Depths Squadron, and a new way to solicit ideas and feedback directly from you via [email protected]. A frequently repeated quote, and for good reason, is an admonition that can be traced back to Archilochus, an 8 8 by Staff of Submarine Learning Center early Greek lyrical poet and soldier circa 650 B.C. Archilochus said that in conflict, “we do not rise to the level of our expectations, we fall to the level of our training.” “I am extremely Junior Officers of the Year “Deep Dive” Into the The theme for this edition of UNDERSEA WARFARE Magazine is training—one proud of the Force’s 14 Washington, D.C. Sub Culture of the most important things we do as Submariners to accomplish today’s mission and by Lt. -
Owner's & Operator's Manual
JANU AR Y 2 0 0 8 MAGAZINEM AGAZINE OF THE U.S. NA VY Owner’s & Operator’s Manual A message from the Chief of Naval operations Admiral gary roughead JANU AR Y 2 0 0 8 MAGAZINEM AGAZINE OF THE U.S. NA VY am pleased to open this year’s “Owner’s and Operator’s” While I may lead our Navy’s issue of All Hands magazine with a message to all Sailors, effort to promote global maritime [Number 089] 2008 owner’s & operator’s manual INavy civilians and family members who are serving our partnerships, all Sailors and January Navy during this important time in our nation’s history. I am Navy civilians are the key to 0XOFSµT 0QFSBUPSµT.BOVBM tremendously proud of you, and I look forward to all that we making this strategy a success. will accomplish together during my time as your Chief of Naval The relationships you form, the Number 1089 • January 2008 Editorial www.navy.mil Editor All Hands (USPS 372-970; ISSN 0002- Operations. partnerships you develop, and Marie G. Johnston 5577) Number 1089 is published monthly Secretary of the Navy Along with the Commandants of the Marine Corps and the friends you make will be the The Honorable Donald C. Winter by the Naval Media Center, Production Assistant Editor/LCPO Department, 2713 Mitscher Rd. S.W., 2 Maritime Strategy 18 Fleet & Family 36 Ships Coast Guard, on behalf of the Navy I recently unveiled our new ones who connect our Navy to Chief of Naval Operations MCC(AW/SW) Ernest W.