Energy Efficiency Aspects of the AMD Zen 2 Architecture
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Effective Virtual CPU Configuration with QEMU and Libvirt
Effective Virtual CPU Configuration with QEMU and libvirt Kashyap Chamarthy <[email protected]> Open Source Summit Edinburgh, 2018 1 / 38 Timeline of recent CPU flaws, 2018 (a) Jan 03 • Spectre v1: Bounds Check Bypass Jan 03 • Spectre v2: Branch Target Injection Jan 03 • Meltdown: Rogue Data Cache Load May 21 • Spectre-NG: Speculative Store Bypass Jun 21 • TLBleed: Side-channel attack over shared TLBs 2 / 38 Timeline of recent CPU flaws, 2018 (b) Jun 29 • NetSpectre: Side-channel attack over local network Jul 10 • Spectre-NG: Bounds Check Bypass Store Aug 14 • L1TF: "L1 Terminal Fault" ... • ? 3 / 38 Related talks in the ‘References’ section Out of scope: Internals of various side-channel attacks How to exploit Meltdown & Spectre variants Details of performance implications What this talk is not about 4 / 38 Related talks in the ‘References’ section What this talk is not about Out of scope: Internals of various side-channel attacks How to exploit Meltdown & Spectre variants Details of performance implications 4 / 38 What this talk is not about Out of scope: Internals of various side-channel attacks How to exploit Meltdown & Spectre variants Details of performance implications Related talks in the ‘References’ section 4 / 38 OpenStack, et al. libguestfs Virt Driver (guestfish) libvirtd QMP QMP QEMU QEMU VM1 VM2 Custom Disk1 Disk2 Appliance ioctl() KVM-based virtualization components Linux with KVM 5 / 38 OpenStack, et al. libguestfs Virt Driver (guestfish) libvirtd QMP QMP Custom Appliance KVM-based virtualization components QEMU QEMU VM1 VM2 Disk1 Disk2 ioctl() Linux with KVM 5 / 38 OpenStack, et al. libguestfs Virt Driver (guestfish) Custom Appliance KVM-based virtualization components libvirtd QMP QMP QEMU QEMU VM1 VM2 Disk1 Disk2 ioctl() Linux with KVM 5 / 38 libguestfs (guestfish) Custom Appliance KVM-based virtualization components OpenStack, et al. -

H242-Z10 Edge Server - AMD up 2U 4 Nodes
H242-Z10 Edge Server - AMD UP 2U 4 Nodes Features • Supports 5G network infrastructure • 2U - 4 nodes rear access server system for Edge Computing • Single AMD EPYC™ 7002 series processor family • 4 x LGA 4094 sockets • 8-Channel RDIMM/LRDIMM DDR4, 32 x DIMMs • 8 x 1Gb/s LAN ports (Intel® I350-AM2) • 4 x 2.5" NVMe hot-swappable SSD bays • 8 x M.2 with PCIe Gen3 x4 interface • 8 x Low profile PCIe x16 expansion slots • 4 x OCP 2.0 Gen3 x16 mezzanine slots • Aspeed® AST2500 remote management controller • 2+0 1200W 80 PLUS Platinum power supply AMD EPYC™ 7002 Series Processor (Rome) The next generation of AMD EPYC has arrived, providing incredible compute, IO and bandwidth capability – designed to meet the huge demand for more compute in big data analytics, HPC and cloud computing. Built on 7nm advanced process technology, allowing for denser compute capabilities with lower power consumption Up to 64 core per CPU, built using Zen 2 high performance cores and AMD’s innovative chiplet architecture Supporting PCIe Gen 4.0 with a bandwidth of up to 64GB/s, twice of PCIe Gen 3.0 Embedded security protection to help defend your CPU, applications, and data Optional CMC / Ring Topology Module GIGABYTE’s H242-Series servers include support for an optional CMC / Ring Topology Module, featuring an Aspeed CMC (Central Management Controller), LAN hub and dual MLAN ports for multi-node management (including iKVM support) by connecting internally to Aspeed BMCs integrated on each node. This results only in one MLAN connection required to perform manage- ment of all four nodes, resulting in less ToR (Top of Rack) cabling and switch connections. -

AMD EPYC™ 7371 Processors Accelerating HPC Innovation
AMD EPYC™ 7371 Processors Solution Brief Accelerating HPC Innovation March, 2019 AMD EPYC 7371 processors (16 core, 3.1GHz): Exceptional Memory Bandwidth AMD EPYC server processors deliver 8 channels of memory with support for up The right choice for HPC to 2TB of memory per processor. Designed from the ground up for a new generation of solutions, AMD EPYC™ 7371 processors (16 core, 3.1GHz) implement a philosophy of Standards Based AMD is committed to industry standards, choice without compromise. The AMD EPYC 7371 processor delivers offering you a choice in x86 processors outstanding frequency for applications sensitive to per-core with design innovations that target the performance such as those licensed on a per-core basis. evolving needs of modern datacenters. No Compromise Product Line Compute requirements are increasing, datacenter space is not. AMD EPYC server processors offer up to 32 cores and a consistent feature set across all processor models. Power HPC Workloads Tackle HPC workloads with leading performance and expandability. AMD EPYC 7371 processors are an excellent option when license costs Accelerate your workloads with up to dominate the overall solution cost. In these scenarios the performance- 33% more PCI Express® Gen 3 lanes. per-dollar of the overall solution is usually best with a CPU that can Optimize Productivity provide excellent per-core performance. Increase productivity with tools, resources, and communities to help you “code faster, faster code.” Boost AMD EPYC processors’ innovative architecture translates to tremendous application performance with Software performance. More importantly, the performance you’re paying for can Optimization Guides and Performance be matched to the appropriate to the performance you need. -

Intel/AMD CPU Release Dates, 2018
Release dates of desktop microprocessors (2018) http://www.cpu-world.com/Releases/Desktop_CPU_releases_(2018).html News • CPUs / Chips • Benchmarks • Information • Forum • Links • About Identification • Pinouts • S-Spec numbers • Glossary Search the site / Ident CPU / Quick CPU looku Release dates of desktop microprocessors (2018) 2017 2019 AMD Intel Desktop CPU releases January 2004 February First Zen-based desktop APUs 2005 14nm, 4 cores, Radeon Vega graphics 2006 2007 Ryzen 3 2200G 2008 3.5GHz / 4MB L3 / 4 cores / Unlocked / Socket AM4 2009 Ryzen 5 2400G 2010 3.6GHz / 4MB L3 / 4 cores / Unlocked / Socket AM4 2011 Other markets: March April 2nd Generation Zen CPUs 8th Generation lineup launch 2018 embedded CPUs 2018 mobile CPUs "Pinnacle Ridge", 12nm, up to 8 cores Coffee Lake-S, 14nm, Up to 6 cores 2018 server CPUs Ryzen 5 2600X Celeron G4900T 3.6GHz / 16MB L3 / 6 cores / Unlocked / Socket AM4 2.9GHz / 2MB L3 / 2 cores / Socket 1151 Ryzen 5 2600 Celeron G4900 3.4GHz / 16MB L3 / 6 cores / Unlocked / Socket AM4 3.1GHz / 2MB L3 / 2 cores / Socket 1151 Ryzen 7 2700X Celeron G4920 3.7GHz / 16MB L3 / 8 cores / Unlocked / Socket AM4 3.2GHz / 2MB L3 / 2 cores / Socket 1151 Ryzen 7 2700 Core i3-8100T 3.2GHz / 16MB L3 / 8 cores / Unlocked / Socket AM4 3.1GHz / 6MB L3 / 4 cores / Socket 1151 Core i3-8300T Ryzen 3 2200GE 3.2GHz / 8MB L3 / 4 cores / Socket 1151 3.2GHz / 4MB L3 / 4 cores / Unlocked / Socket AM4 Core i3-8300 Ryzen 5 2400GE 3.7GHz / 8MB L3 / 4 cores / Socket 1151 3.2GHz / 4MB L3 / 4 cores / Unlocked / Socket AM4 Core i5-8400T 1.7GHz -

Evaluation of AMD EPYC
Evaluation of AMD EPYC Chris Hollowell <[email protected]> HEPiX Fall 2018, PIC Spain What is EPYC? EPYC is a new line of x86_64 server CPUs from AMD based on their Zen microarchitecture Same microarchitecture used in their Ryzen desktop processors Released June 2017 First new high performance series of server CPUs offered by AMD since 2012 Last were Piledriver-based Opterons Steamroller Opteron products cancelled AMD had focused on low power server CPUs instead x86_64 Jaguar APUs ARM-based Opteron A CPUs Many vendors are now offering EPYC-based servers, including Dell, HP and Supermicro 2 How Does EPYC Differ From Skylake-SP? Intel’s Skylake-SP Xeon x86_64 server CPU line also released in 2017 Both Skylake-SP and EPYC CPU dies manufactured using 14 nm process Skylake-SP introduced AVX512 vector instruction support in Xeon AVX512 not available in EPYC HS06 official GCC compilation options exclude autovectorization Stock SL6/7 GCC doesn’t support AVX512 Support added in GCC 4.9+ Not heavily used (yet) in HEP/NP offline computing Both have models supporting 2666 MHz DDR4 memory Skylake-SP 6 memory channels per processor 3 TB (2-socket system, extended memory models) EPYC 8 memory channels per processor 4 TB (2-socket system) 3 How Does EPYC Differ From Skylake (Cont)? Some Skylake-SP processors include built in Omnipath networking, or FPGA coprocessors Not available in EPYC Both Skylake-SP and EPYC have SMT (HT) support 2 logical cores per physical core (absent in some Xeon Bronze models) Maximum core count (per socket) Skylake-SP – 28 physical / 56 logical (Xeon Platinum 8180M) EPYC – 32 physical / 64 logical (EPYC 7601) Maximum socket count Skylake-SP – 8 (Xeon Platinum) EPYC – 2 Processor Inteconnect Skylake-SP – UltraPath Interconnect (UPI) EYPC – Infinity Fabric (IF) PCIe lanes (2-socket system) Skylake-SP – 96 EPYC – 128 (some used by SoC functionality) Same number available in single socket configuration 4 EPYC: MCM/SoC Design EPYC utilizes an SoC design Many functions normally found in motherboard chipset on the CPU SATA controllers USB controllers etc. -

AMD Ryzen™ PRO & Athlon™ PRO Processors Quick Reference Guide
AMD Ryzen™ PRO & Athlon™ PRO Processors Quick Reference guide AMD Ryzen™ PRO Processors with Radeon™ Graphics for Business Laptops (Socket FP6/FP5) 1 Core/Thread Frequency Boost/Base L2+L3 Cache Graphics Node TDP Intel vPro Core/Thread Frequency Boost*/Base L2+L3 Cache Graphics Node TDP AMD PRO technologies COMPARED TO 4.9/1.1 Radeon™ 6/12 UHD AMD Ryzen™ 7 PRO 8/16 Up to 12MB Graphics 7nm 15W intel Intel Core i7 10810U GHz 13MB 4750U 4.1/1.7 GHz CORE i7 14nm 15W (7 Cores) 10th Gen Intel Core i7 10610U 4/8 4.9/1.8 9MB UHD GHz AMD Ryzen™ 7 PRO Up to Radeon™ intel 4/8 6MB 10 12nm 15W 4.8/1.9 3700U 4.0/2.3 GHz Vega CORE i7 Intel Core i7 8665U 4/8 9MB UHD 14nm 15W 8th Gen GHz Radeon™ AMD Ryzen™ 5 PRO 6/12 Up to 11MB Graphics 7nm 15W intel 4.4/1.7 4650U 4.0/2.1 GHz CORE i5 Intel Core i5 10310U 4/8 7MB UHD 14nm 15W GHz (6 Cores) 10th Gen AMD Ryzen™ 5 PRO 4/8 Up to 6MB Radeon™ 12nm 15W intel 4.1/1.6 3500U 3.7/2.1 GHz Vega8 CORE i5 Intel Core i5 8365U 4/8 7MB UHD 14nm 15W th GHz 8 Gen Radeon™ AMD Ryzen™ 3 PRO 4/8 Up to 6MB Graphics 7nm 15W intel 4.1/2.1 4450U 3.7/2.5 GHz CORE i3 Intel Core i3 10110U 2/4 5MB UHD 14nm 15W (5 Cores) 10th Gen GHz AMD Ryzen™ 3 PRO 4/4 Up to 6MB Radeon™ 12nm 15W intel 3.9/2.1 3300U 3.5/2.1 GHz Vega6 CORE i3 Intel Core i3 8145U 2/4 4.5MB UHD 14nm 15W 8th Gen GHz AMD Athlon™ PRO Processors with Radeon™ Vega Graphics for Business Laptops (Socket FP5) AMD Athlon™ PRO Up to Radeon™ intel Intel Pentium 4415U 2/4 2.3 GHz 2.5MB HD 610 14nm 15W 300U 2/4 3.3/2.4 GHz 5MB Vega3 12nm 15W 1. -
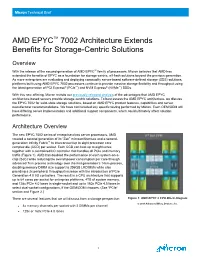
AMD EPYC 7002 Architecture Extends Benefits for Storage-Centric
Micron Technical Brief AMD EPYC™ 7002 Architecture Extends Benefits for Storage-Centric Solutions Overview With the release of the second generation of AMD EPYC™ family of processors, Micron believes that AMD has extended the benefits of EPYC as a foundation for storage-centric, all-flash solutions beyond the previous generation. As more enterprises are evaluating and deploying commodity server-based software-defined storage (SDS) solutions, platforms built using AMD EPYC 7002 processors continue to provide massive storage flexibility and throughput using the latest generation of PCI Express® (PCIe™) and NVM Express® (NVMe™) SSDs. With this new offering, Micron revisits our previously released analysis of the advantages that AMD EPYC architecture-based servers provide storage-centric solutions. To best assess the AMD EPYC architecture, we discuss the EPYC 7002 for solid-state storage solutions, based on AMD EPYC product features, capabilities and server manufacturer recommendations. We have not included any specific testing performed by Micron. Each OEM/ODM will have differing server implementation and additional support components, which could ultimately affect solution performance. Architecture Overview The new EPYC 7002 series of enterprise-class server processors, AMD created a second generation of its “Zen” microarchitecture and a second- generation Infinity Fabric™ to interconnect up to eight processor core complex die (CCD) per socket. Each CCD can host up to eight cores together with a centralized I/O controller that handles all PCIe and memory traffic (Figure 1). AMD has doubled the performance of each system-on-a- chip (SoC) while reducing the overall power consumption per core through advanced 7nm process technology over the first generation’s 14nm process, doubling memory DIMM size support to 256GB LRDIMMs while also providing a 2x peripheral throughput increase with the introduction of PCIe Generation 4.0 I/O controllers. -

Amd(Amd.Us)18Q1 点评 2018 年 07 月 30 日
海外公司报告 | 公司动态研究 证券研究报告 AMD(AMD.US)18Q1 点评 2018 年 07 月 30 日 作者 AMD 7 年最佳,10 年翻身,重申买入,TP 上调至 何翩翩 分析师 23 美元 SAC 执业证书编号:S1110516080002 [email protected] 业绩超预期,7 年来最佳盈利季 雷俊成 分析师 SAC 执业证书编号:S1110518060004 AMD 18Q2 实现 7 年来最佳盈利季度,non-GAAP EPS 0.14 美元,营收 17.6 [email protected] 亿美元同比大涨 53%,均超过华尔街预期的 EPS 0.13 美元和营收 17.2 亿美 马赫 分析师 SAC 执业证书编号:S1110518070001 元。计算与图形业务同比大涨 64%至 10.9 亿美元好于市场预期的 10.6 亿, [email protected] 但受 Q2 区块链相关贡献进一步减弱带来该业务环比跌 3%。挖矿业务本季 董可心 联系人 营收占比从上季的 10%降低为 6%,公司进一步看淡下半年需求。EESC 业务 [email protected] 同比涨 37%至 6.7 亿美元,好于预期的 6.61 亿,EPYC 逐步进入放量阶段, 公司维持到年底会实现中单位数份额的预测。Q2 毛利率提升至 37%,Q3 指引营收 17 亿美元,同比增长 7%,略低于市场预期的 17.6 亿,毛利率提 相关报告 升至约 38%;全年指引营收增速保持 25%,我们认为公司指引基于 17Q3 的 1 《AMD(AMD.US)点评:EPYC“从 高基数较为保守,且区块链影响作为一次性业务逐渐消弭也会进一步减少 零到一”终实现,7nm 产品周期全方位 业绩不确定性,我们看好 EPYC 会在下半年至 Q4 迎来关键放量。 回归“传奇”;TP 上调至 22 美元,重 服务器市场 AMD 与 Intel“荣辱互见” 申买入》2018-06-20 2 《AMD(AMD.US)点评:公布 7nm 服务器市场 AMD 与 Intel“荣辱互见”,EPYC 服务器随着 Cisco、HPE 适配 GPU 加入 AI 计算抢滩战,Ryzen+EPYC 以及超级云计算客户的需求能见度提高,Q2 出货量和营收均环比提高超 50%,目前与 AMD 合作的 5 个云计算巨头成主要推动力。我们认为 AMD “双子星”仍是中流砥柱;TP 上调至 将继续通过单插槽服务器高核心数和低功耗打造性价比优势,下半年加速 18 美元,重申买入》2018-06-08 市场渗透蚕食 Intel 份额,进入明年则等待 7nm 的第二代 EPYC 面市,面对 3 《AMD(AMD.US)18Q1 点评:2018 已将 10nm Cannon Lake 量产时点延后至明年的 Intel,AMD 将终于实现制 开门红,业绩指引均超预期,Ryzen 继 程反超,加速量价齐升。“从零到一”抢占 20 亿美元以上的市场份额。 续扎实闪耀,EPYC 仍待升级放量,重 反观 Intel Q2 数据中心业务收入 55.5 亿美元,虽然在整体行业高景气度下 申买入》2018-04-30 同比增长 27%,但仍低于市场预期的 56.3 亿美元。业绩发布会上 Intel 更为 4 《2017 扭亏为盈业绩迎拐点,2018 明确消费级 10nm 产品会到 19 年下半年节日旺季才推向市场,让市场情绪 厚积待薄发,Ryzen+EPYC 继续双星闪 愈加悲观的同时也给了 AMD 足够的时间窗口。 耀,重申买入》2018-02-01 Ryzen 继续攻城略地,进一步打开笔记本市场 5 《AMD(AMD.US)点评:合作英特 -

Software-Based Undervolting Faults in AMD Zen Processors Fehler in AMD Zen Prozessoren Durch Software-Basierte Unterspannung
Software-based Undervolting Faults in AMD Zen Processors Fehler in AMD Zen Prozessoren durch Software-basierte Unterspannung Bachelorarbeit im Rahmen des Studiengangs IT-Sicherheit der Universität zu Lübeck vorgelegt von Anja Rabich ausgegeben und betreut von Prof. Dr. Thomas Eisenbarth mit Unterstützung von Luca Wilke Lübeck, den 31. August 2020 Abstract Dynamic Voltage and Frequency Scaling (DVFS) is a powerful performance enhance- ment method used by modern processors, allowing them to scale voltage or frequency as needed based on the power requirements of the CPU. This not only saves power, but also prevents processors from overheating. However, the continued integration of soft- ware interfaces giving a user direct access to this functionality has been shown to be a potential security risk, allowing a privileged adversary to indirectly tamper with sensitive computations. This thesis summarizes the results of various papers showing that using DVFS features, unsuitable voltage/frequency values can be set for the processor leading to hardware faults and calculation errors which can be used to undermine the integrity of Trusted Execution Environments (TEE). Results are partially replicated for Intel’s TEE implementation SGX, followed by extending the same methodology to AMD’s Zen Pro- cessors, on which there is currently no information. Results show that undervolting is an unlikely attack vector. iii Zusammenfassung Dynamische Spannungs- und Frequenzskalierung (engl. DVFS) ist ein in modernen Prozessoren vorhandener Leistungs- und Stromverwaltungsmechanismus, womit Span- nung und Frequenz der CPU je nach Bedarf skaliert werden können. Somit wird nicht nur Strom gespart, sondern auch zusätzlich verhindert, dass der Prozessor überhitzt. Die zunehmende Integration von Softwareschnittstellen zu diesen Mechanismen die dem Nutzer Einstellungsmöglichkeiten anbieten, haben sich zunehmend als potenzielle Sicherheitslücke erwiesen. -

High Performance Linpack Benchmark on AMD EPYC™ Processors
High Performance Linpack Benchmark on AMD EPYC™ Processors This document details running the High Performance Linpack (HPL) benchmark using the AMD xhpl binary. HPL Implementation: The HPL benchmark presents an opportunity to demonstrate the optimal combination of multithreading (via the OpenMP library) and MPI for scientific and technical high-performance computing on the EPYC architecture. For MPI applications where the per-MPI-rank work can be further parallelized, each L3 cache is an MPI rank running a multi-threaded application. This approach results in fewer MPI ranks than using one rank per core, and results in a corresponding reduction in MPI overhead. The ideal balance is for the number of threads per MPI rank to be less than or equal to the number of CPUs per L3 cache. The exact maximum thread count per MPI rank depends on both the specific EPYC SKU (e.g. 32 core parts have 4 physical cores per L3, 24 core parts have 3 physical cores per L3) and whether SMT is enabled (e.g. for a 32 core part with SMT enabled there are 8 CPUs per L3). HPL performance is primarily determined by DGEMM performance, which is in turn primarily determined by SIMD throughput. The Zen microarchitecture of the EPYC processor implements one SIMD unit per physical core. Since HPL is SIMD limited, when SMT is enabled using a second HPL thread per core will not directly improve HPL performance. However, leaving SMT enabled may indirectly allow slightly higher performance (1% - 2%) since the OS can utilize the SMT siblings as needed without pre-empting the HPL threads. -

AMD's Early Processor Lines, up to the Hammer Family (Families K8
AMD’s early processor lines, up to the Hammer Family (Families K8 - K10.5h) Dezső Sima October 2018 (Ver. 1.1) Sima Dezső, 2018 AMD’s early processor lines, up to the Hammer Family (Families K8 - K10.5h) • 1. Introduction to AMD’s processor families • 2. AMD’s 32-bit x86 families • 3. Migration of 32-bit ISAs and microarchitectures to 64-bit • 4. Overview of AMD’s K8 – K10.5 (Hammer-based) families • 5. The K8 (Hammer) family • 6. The K10 Barcelona family • 7. The K10.5 Shanghai family • 8. The K10.5 Istambul family • 9. The K10.5-based Magny-Course/Lisbon family • 10. References 1. Introduction to AMD’s processor families 1. Introduction to AMD’s processor families (1) 1. Introduction to AMD’s processor families AMD’s early x86 processor history [1] AMD’s own processors Second sourced processors 1. Introduction to AMD’s processor families (2) Evolution of AMD’s early processors [2] 1. Introduction to AMD’s processor families (3) Historical remarks 1) Beyond x86 processors AMD also designed and marketed two embedded processor families; • the 2900 family of bipolar, 4-bit slice microprocessors (1975-?) used in a number of processors, such as particular DEC 11 family models, and • the 29000 family (29K family) of CMOS, 32-bit embedded microcontrollers (1987-95). In late 1995 AMD cancelled their 29K family development and transferred the related design team to the firm’s K5 effort, in order to focus on x86 processors [3]. 2) Initially, AMD designed the Am386/486 processors that were clones of Intel’s processors. -

AMD Raven Ridge
DELIVERING A NEW LEVEL OF VISUAL PERFORMANCE IN AN SOC AMD “RAVEN RIDGE” APU Dan Bouvier, Jim Gibney, Alex Branover, Sonu Arora Presented by: Dan Bouvier Corporate VP, Client Products Chief Architect AMD CONFIDENTIAL RAISING THE BAR FOR THE APU VISUAL EXPERIENCE Up to MOBILE APU GENERATIONAL 200% MORE CPU PERFORMANCE PERFORMANCE GAINS Up to 128% MORE GPU PERFORMANCE Up to 58% LESS POWER FIRST “Zen”-based APU CPU Performance GPU Performance Power HIGH-PERFORMANCE AMD Ryzen™ 7 2700U 7th Gen AMD A-Series APU On-die “Vega”-based graphics Scaled GPU Managed Improved Upgraded Increased LONG BATTERY LIFE and CPU up to power delivery memory display package Premium form factors reach target and thermal bandwidth experience performance frame rate dissipation efficiency density 2 | AMD Ryzen™ Processors with Radeon™ Vega Graphics - Hot Chips 30 | * See footnotes for details. “RAVEN RIDGE” APU AMD “ZEN” x86 CPU CORES CPU 0 “ZEN” CPU CPU 1 (4 CORE | 8 THREAD) USB 3.1 NVMe PCIe FULL PCIe GPP ----------- ----------- Discrete SYSTEM 4MB USB 2.0 SATA GFX CONNECTIVITY CPU 2 CPU 3 L3 Cache X64 DDR4 HIGH BANDWIDTH SOC FABRIC System Infinity Fabric & MEMORY Management SYSTEM Unit ACCELERATED Platform Multimedia Security MULTIMEDIA Processor Engines AMD GFX+ 1MB L2 EXPERIENCE X64 DDR4 (11 COMPUTE UNITS) Cache Video Audio Sensor INTEGRATED CU CU CU CU CU CU Display Codec ACP Fusion Controller Next SENSOR Next Hub FUSION HUB CU CU CU CU CU AMD “VEGA” GPU UPGRADED DISPLAY ENGINE 3 | AMD Ryzen™ Processors with Radeon™ Vega Graphics - Hot Chips 30 | SIGNIFICANT DENSITY INCREASE “Raven Ridge” die BGA Package: 25 x 35 x 1.38mm Technology: GLOBALFOUNDRIES 14nm – 11 layer metal Transistor count: 4.94B 59% 16% Die Size: 209.78mm2 more transistors smaller die than prior generation “Bristol Ridge” APU 4 | AMD Ryzen™ Processors with Radeon™ Vega Graphics - Hot Chips 30 | * See footnotes for details.