Data Production on Past and Future NASA Missions Lee E
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Quantitative Human Spacecraft Design Evaluation Model For
A QUANTITATIVE HUMAN SPACECRAFT DESIGN EVALUATION MODEL FOR ASSESSING CREW ACCOMMODATION AND UTILIZATION by CHRISTINE FANCHIANG B.S., Massachusetts Institute of Technology, 2007 M.S., University of Colorado Boulder, 2010 A thesis submitted to the Faculty of the Graduate School of the University of Colorado in partial fulfillment of the requirement for the degree of Doctor of Philosophy Department of Aerospace Engineering Sciences 2017 i This thesis entitled: A Quantitative Human Spacecraft Design Evaluation Model for Assessing Crew Accommodation and Utilization written by Christine Fanchiang has been approved for the Department of Aerospace Engineering Sciences Dr. David M. Klaus Dr. Jessica J. Marquez Dr. Nisar R. Ahmed Dr. Daniel J. Szafir Dr. Jennifer A. Mindock Dr. James A. Nabity Date: 13 March 2017 The final copy of this thesis has been examined by the signatories, and we find that both the content and the form meet acceptable presentation standards of scholarly work in the above mentioned discipline. ii Fanchiang, Christine (Ph.D., Aerospace Engineering Sciences) A Quantitative Human Spacecraft Design Evaluation Model for Assessing Crew Accommodation and Utilization Thesis directed by Professor David M. Klaus Crew performance, including both accommodation and utilization factors, is an integral part of every human spaceflight mission from commercial space tourism, to the demanding journey to Mars and beyond. Spacecraft were historically built by engineers and technologists trying to adapt the vehicle into cutting edge rocketry with the assumption that the astronauts could be trained and will adapt to the design. By and large, that is still the current state of the art. It is recognized, however, that poor human-machine design integration can lead to catastrophic and deadly mishaps. -
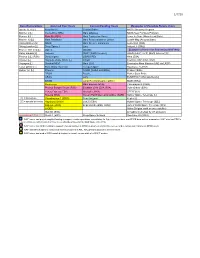
List of Missions Using SPICE (PDF)
1/7/20 Data Restorations Selected Past Users Current/Pending Users Examples of Possible Future Users Apollo 15, 16 [L] Magellan [L] Cassini Orbiter NASA Discovery Program Mariner 2 [L] Clementine (NRL) Mars Odyssey NASA New Frontiers Program Mariner 9 [L] Mars 96 (RSA) Mars Exploration Rover Lunar IceCube (Moorehead State) Mariner 10 [L] Mars Pathfinder Mars Reconnaissance Orbiter LunaH-Map (Arizona State) Viking Orbiters [L] NEAR Mars Science Laboratory Luna-Glob (RSA) Viking Landers [L] Deep Space 1 Juno Aditya-L1 (ISRO) Pioneer 10/11/12 [L] Galileo MAVEN Examples of Users not Requesting NAIF Help Haley armada [L] Genesis SMAP (Earth Science) GOLD (LASP, UCF) (Earth Science) [L] Phobos 2 [L] (RSA) Deep Impact OSIRIS REx Hera (ESA) Ulysses [L] Huygens Probe (ESA) [L] InSight ExoMars RSP (ESA, RSA) Voyagers [L] Stardust/NExT Mars 2020 Emmirates Mars Mission (UAE via LASP) Lunar Orbiter [L] Mars Global Surveyor Europa Clipper Hayabusa-2 (JAXA) Helios 1,2 [L] Phoenix NISAR (NASA and ISRO) Proba-3 (ESA) EPOXI Psyche Parker Solar Probe GRAIL Lucy EUMETSAT GEO satellites [L] DAWN Lunar Reconnaissance Orbiter MOM (ISRO) Messenger Mars Express (ESA) Chandrayan-2 (ISRO) Phobos Sample Return (RSA) ExoMars 2016 (ESA, RSA) Solar Orbiter (ESA) Venus Express (ESA) Akatsuki (JAXA) STEREO [L] Rosetta (ESA) Korean Pathfinder Lunar Orbiter (KARI) Spitzer Space Telescope [L] [L] = limited use Chandrayaan-1 (ISRO) New Horizons Kepler [L] [S] = special services Hayabusa (JAXA) JUICE (ESA) Hubble Space Telescope [S][L] Kaguya (JAXA) Bepicolombo (ESA, JAXA) James Webb Space Telescope [S][L] LADEE Altius (Belgian earth science satellite) ISO [S] (ESA) Armadillo (CubeSat, by UT at Austin) Last updated: 1/7/20 Smart-1 (ESA) Deep Space Network Spectrum-RG (RSA) NAIF has or had project-supplied funding to support mission operations, consultation for flight team members, and SPICE data archive preparation. -

The NISAR Mission – Sensors & Mission Perspective Paul a Rosen Jet Propulsion Laboratory, California Institute of Technology
The NISAR Mission – Sensors & Mission Perspective Paul A Rosen Jet Propulsion Laboratory, California Institute of Technology ISPRS TC V Mid Term Symposium Indian Institute of Remote Sensing, Dehradun, India November 20th, 2018 Copyright 2018 California Institute of Technology. Government sponsorship acknowledged. NISAR – NASA Science Focus Capturing the Earth in Motion NISAR will image Earth’s dynamic surface over time, providing information on changes in ice sheets and glaciers, the evolution of natural and managed ecosystems, earthquake and volcano deformation, subsidence from groundwater and oil pumping, and the human impact of these and many other phenomena. 2 Versatility of SAR for Studying Earth Change Polarimetric SAR Use of polarization to determine surface properties Applications: • Flood extent (w/ & w/o vegetation) • Land loss/gain • Coastal bathymetry • Biomass • Vegetation type, status • Pollution & pollution impact (water, coastal land) • Water flow in some deltaic islands Interferometric SAR Use of phase change to determine surface displacement Applications: • Geophysical modeling • Subsidence due to fluid withdrawal • Inundation (w/vegetation) • Change in flood extent • Water flow through wetlands 3 Earth’s Dynamic Subsurface ”Secular” motion ”Seasonal” motion • Data 18-year time series (881 igrams) + GPS + Hydraulic head from observation wells + geologic structure model • Spatial pattern of seasonal ground deformation near the center of the basin corresponds to a diffusion process with peak deformation occurring at locations with highest groundwater production. • Seasonal ground deformation associated with shallow aquifers used for the majority of groundwater production Quantifying Ground Deformation in the Los Angeles and Santa Ana • Long -term ground deformation over broader areas - Coastal Basins Due to Groundwater Withdrawal, B. Riel et al., Water correlated with delayed compaction of deeper aquifers and Resources Res., 54, doi:10.1029/2017WR021978, 2018. -

Gao-21-306, Nasa
United States Government Accountability Office Report to Congressional Committees May 2021 NASA Assessments of Major Projects GAO-21-306 May 2021 NASA Assessments of Major Projects Highlights of GAO-21-306, a report to congressional committees Why GAO Did This Study What GAO Found This report provides a snapshot of how The National Aeronautics and Space Administration’s (NASA) portfolio of major well NASA is planning and executing projects in the development stage of the acquisition process continues to its major projects, which are those with experience cost increases and schedule delays. This marks the fifth year in a row costs of over $250 million. NASA plans that cumulative cost and schedule performance deteriorated (see figure). The to invest at least $69 billion in its major cumulative cost growth is currently $9.6 billion, driven by nine projects; however, projects to continue exploring Earth $7.1 billion of this cost growth stems from two projects—the James Webb Space and the solar system. Telescope and the Space Launch System. These two projects account for about Congressional conferees included a half of the cumulative schedule delays. The portfolio also continues to grow, with provision for GAO to prepare status more projects expected to reach development in the next year. reports on selected large-scale NASA programs, projects, and activities. This Cumulative Cost and Schedule Performance for NASA’s Major Projects in Development is GAO’s 13th annual assessment. This report assesses (1) the cost and schedule performance of NASA’s major projects, including the effects of COVID-19; and (2) the development and maturity of technologies and progress in achieving design stability. -
PT-365-Science-And-Tech-2020.Pdf
SCIENCE AND TECHNOLOGY Table of Contents 1. BIOTECHNOLOGY ___________________ 3 3.11. RFID ___________________________ 29 1.1. DNA Technology (Use & Application) 3.12. Miscellaneous ___________________ 29 Regulation Bill ________________________ 3 4. DEFENCE TECHNOLOGY _____________ 32 1.2. National Guidelines for Gene Therapy __ 3 4.1. Missiles _________________________ 32 1.3. MANAV: Human Atlas Initiative _______ 5 4.2. Submarine and Ships _______________ 33 1.4. Genome India Project _______________ 6 4.3. Aircrafts and Helicopters ____________ 34 1.5. GM Crops _________________________ 6 4.4. Other weapons system _____________ 35 1.5.1. Golden Rice ________________________ 7 4.5. Space Weaponisation ______________ 36 2. SPACE TECHNOLOGY ________________ 8 4.6. Drone Regulation __________________ 37 2.1. ISRO _____________________________ 8 2.1.1. Gaganyaan _________________________ 8 4.7. Other important news ______________ 38 2.1.2. Chandrayaan 2 _____________________ 9 2.1.3. Geotail ___________________________ 10 5. HEALTH _________________________ 39 2.1.4. NaVIC ____________________________ 11 5.1. Viral diseases _____________________ 39 2.1.5. GSAT-30 __________________________ 12 5.1.1. Polio _____________________________ 39 2.1.6. GEMINI __________________________ 12 5.1.2. New HIV Subtype Found by Genetic 2.1.7. Indian Data Relay Satellite System (IDRSS) Sequencing _____________________________ 40 ______________________________________ 13 5.1.3. Other viral Diseases _________________ 40 2.1.8. Cartosat-3 ________________________ 13 2.1.9. RISAT-2BR1 _______________________ 14 5.2. Bacterial Diseases _________________ 40 2.1.10. Newspace India ___________________ 14 5.2.1. Tuberculosis _______________________ 40 2.1.11. Other ISRO Missions _______________ 14 5.2.1.1. Global Fund for AIDS, TB and Malaria42 5.2.2. -

NISAR Science Workshop – 2014
Science Workshop – 2014 NISAR Space Applications Centre NISAR Mission Overview Tapan Misra (ISRO) & Paul Rosen (JPL) Space Applications Centre (SAC) NASA ISRO Synthetic Aperture Radar (NISAR) NISAR Mission Overview Payload / Mission Characteristics Would Enable 1 L-band (24 cm wavelength) Low temporal decorrelation and foliage penetration 2 S-band (12 cm wavelength) Sensitivity to light vegetation 3 SweepSAR technique with Imaging Swath > Global data collection 240 km 4 Polarimetry (Single/Dual/Quad) Surface characterization and biomass estimation 5 12-day exact repeat Rapid Sampling 6 3 – 10 meters mode-dependent SAR resolution Small-scale observations 7 3 years science operations (5 years Time-series analysis consumables) 8 Pointing control < 273 arcseconds Deformation interferometry 9 Orbit control < 500 meters Deformation interferometry 10 > 30% observation duty cycle Complete land/ice coverage 11 Left/Right pointing capability Polar coverage, north and south th th *Mission Concept – Pre-decisional – for Planning and NISAR Science Workshop, SAC Ahmedabad – 17 & 18 Nov. 2014 2 Discussion Purposes Only Key Capabilities for NISAR Repeatable orbits and instrument pointing Swath width sufficient to cover ground-track spacing at equator Polarimetric synthetic aperture radar with “industry-standard” performance parameters valid over the full swath All imaging with the instrument boresight pointed 37 degrees off-nadir and +/- 90 degrees off the body-fixed velocity vector Orbit reconstruction to cm-scale accuracy for efficient interferometric processing and calibration Sufficient duty cycle and mission resources to strobe Earth’s land and ice on ascending and descending orbits each repeat cycle 24-hour turnaround on urgent retargeting and 5-hour latency for data designated as urgent th th *Mission Concept – Pre-decisional – for Planning and NISAR Science Workshop, SAC Ahmedabad – 17 & 18 Nov. -

INDIA JANUARY 2018 – June 2020
SPACE RESEARCH IN INDIA JANUARY 2018 – June 2020 Presented to 43rd COSPAR Scientific Assembly, Sydney, Australia | Jan 28–Feb 4, 2021 SPACE RESEARCH IN INDIA January 2018 – June 2020 A Report of the Indian National Committee for Space Research (INCOSPAR) Indian National Science Academy (INSA) Indian Space Research Organization (ISRO) For the 43rd COSPAR Scientific Assembly 28 January – 4 Febuary 2021 Sydney, Australia INDIAN SPACE RESEARCH ORGANISATION BENGALURU 2 Compiled and Edited by Mohammad Hasan Space Science Program Office ISRO HQ, Bengalure Enquiries to: Space Science Programme Office ISRO Headquarters Antariksh Bhavan, New BEL Road Bengaluru 560 231. Karnataka, India E-mail: [email protected] Cover Page Images: Upper: Colour composite picture of face-on spiral galaxy M 74 - from UVIT onboard AstroSat. Here blue colour represent image in far ultraviolet and green colour represent image in near ultraviolet.The spiral arms show the young stars that are copious emitters of ultraviolet light. Lower: Sarabhai crater as imaged by Terrain Mapping Camera-2 (TMC-2)onboard Chandrayaan-2 Orbiter.TMC-2 provides images (0.4μm to 0.85μm) at 5m spatial resolution 3 INDEX 4 FOREWORD PREFACE With great pleasure I introduce the report on Space Research in India, prepared for the 43rd COSPAR Scientific Assembly, 28 January – 4 February 2021, Sydney, Australia, by the Indian National Committee for Space Research (INCOSPAR), Indian National Science Academy (INSA), and Indian Space Research Organization (ISRO). The report gives an overview of the important accomplishments, achievements and research activities conducted in India in several areas of near- Earth space, Sun, Planetary science, and Astrophysics for the duration of two and half years (Jan 2018 – June 2020). -

NISAR Utilization Plan
JPL D-102207 Pasadena, California Revision Date Pages Affiliated Description Final 9/04/2018 All Initial Release ii JPL D-102207 Contents 1 UTILIZATION PLAN OVERVIEW ...................................................................................... 1-1 1.1 MISSION AND PLAN OVERVIEW ....................................................................... 1-1 1.2 GOALS AND OBJECTIVES .................................................................................... 1-2 2 ADVANCING APPLICATIONS WITH NISAR................................................................... 2-1 2.1 APPLICATIONS OVERVIEW ................................................................................. 2-1 2.1.1 Ecosystems ..................................................................................................... 2-2 2.1.2 Hydrology and Subsurface Reservoirs ......................................................... 2-3 2.1.3 Marine and Coastal Hazards ......................................................................... 2-3 2.1.4 Critical Infrastructure..................................................................................... 2-4 2.1.5 Geologic and Anthropogenic Hazards .......................................................... 2-5 2.2 NISAR TARGETED APPLICATIONS .................................................................... 2-6 2.3 EARLY ENGAGEMENT .......................................................................................... 2-6 2.3.1 Application Area-Specific Workshops ........................................................ -

Science & Technology
2 INDEX 1. Space Technology ............................................... 6 1.38 Juno Spacecraft ......................................................... 20 1.1 Types of Orbits ............................................................ 6 1.39 OSIRIS-REx ............................................................... 20 1.2 Types of Satellites ........................................................ 7 1.40 Orion Spacecraft ........................................................ 21 1.3 Launch Vehicles .......................................................... 7 1.41 Voyager 1 & Voyager 2 ............................................. 21 1.42 Dawn Mission ............................................................ 21 Indian Missions ........................................................ 10 1.43 Europa Clipper Mission............................................. 22 1.4 PSLV C-44/Kalamsat ................................................ 10 1.44 Lucy and Psyche ........................................................ 22 1.5 PSLV C-43/HysIS ...................................................... 10 1.45 Magnetospheric Multiscale (MMS) Mission .............. 22 1.6 HySIS ......................................................................... 11 1.46 CubeSat...................................................................... 23 1.7 PSLV C-42................................................................. 11 1.47 NICER ....................................................................... 23 1.8 PSLV C-41/IRNSS-1I................................................ -

Adapting to Climate Variability Through Innovation February 26, 2021
Adapting to Climate Variability Through Innovation February 26, 2021 Hosted by Paul Jones II, P.E. Task Force Chair General Manager Eastern Municipal Water District Agenda i. Welcome and Introductions ii. New Board Members: EMWD and WMWD iii. Panel Discussion: Water Project Marvels a. Abbey Nastan, NASA Jet Propulsion Labs b. Randall Neudeck, Metropolitan Water District of Southern California iv. Facilitated Question and Answer v. Chair and Vice Chair Transition vi. Closing Remarks Jeff Armstrong Board Member Eastern Municipal Water District Mike Gardner Board Member Western Municipal Water District Fauzia Rizvi Board Member Western Municipal Water District Abbey Nastan Applied Science Systems Engineer NASA Jet Propulsion Labs Water and Climate: JPL’s Capabilities Abbey Nastan Applied Science Systems Engineering © 2021 California Institute of Technology. Government sponsorship acknowledged. CL#21-0858 JPL Capabilities in Water Resource Management EXPERIENCE, TECHNOLOGY & ASSETS Airborne Spaceborne Models & Studies Landsat ASO* AIRS Spectral information from Earth’s surface Airborne Snow Observatory (ASO) Atmospheric Infrared Sounder ARIA MODIS AirMSPI Advanced Rapid Imaging and Analysis Moderate Resolution Imaging Airborne Multiangle SpectroPolarimetric Imager UAVSAR / Sentinel-1 / COSMO-SkyMed / ALOS-2 Spectroradiometer JPL Scientists AVIRIS ASTER SMAP Airborne Visible/InfraRed Imaging Spectrometer Advanced Spaceborne Thermal Emission and Soil Moisture Active/Passive & Engineers Reflection Radiometer JPL scientists have published extensively -

2015 NISAR Applications Workshop Report
2015 NISAR Applications Workshop: Applications Community Suggestions for Developing an Applications Plan October 13-15, 2015 Workshop Report Report Writing Committee • E. Natasha Stavros (Jet Propulsion Laboratory) • Susan Owen (Jet Propulsion Laboratory) • Gerald Bawden (NASA Headquarters) • Bruce Davis (Davis Consulting) • Tom Farr (Jet Propulsion Laboratory) • Margaret Glasscoe (Jet Propulsion Laboratory) • Cathleen Jones (Jet Propulsion Laboratory) • Marco Lavalle (Jet Propulsion Laboratory) • Franz Meyer (University of Alaska Fairbanks) • Frank Monaldo (NOAA and Applied Physics Lab, Johns Hopkins University) • Paul Rosen (Jet Propulsion Laboratory) • Anne Rosinski (California Geological Survey - CA Earthquake Clearinghouse) • Sassan Saatchi (Jet Propulsion Laboratory) • Paul Siqueira (University of Massachusetts) • Tracy Whelen (University of Massachusetts) Workshop Organizing Committee • Susan Owen (Jet Propulsion Laboratory) • Gerald Bawden (NASA Headquarters) • Anup Das (Indian Space Research Organization -- ISRO) • Craig Dobson (NASA Headquarters) • Tom Farr (Jet Propulsion Laboratory) • Margaret Glasscoe (Jet Propulsion Laboratory) • David Green (NASA Headquarters) • Brad Hager (Massachuesetts Institute of Technology) • Ben Holt (Jet Propulsion Laboratory) • Cathleen Jones (Jet Propulsion Laboratory) • Eric Kasischke (NASA Headquarters) • Josef Kellndorfer (Earth Big Data, LLC) • Marco Lavalle (Jet Propulsion Laboratory) • Zhong Lu (Southern Methodist University) • John Mathew (Indian Space Research Organization -- ISRO) • Franz -

14-4572 A1b.Pdf
NI SAR Spacecraft Concept Overview: Design challenges for a proposed flagship dual -frequency SAR Mission Peter Xaypraseuth, Alok Chatterjee R. Satish Jet Propulsion Lab oratory, ISRO Satellite Center California Institute of Technology PB No. 1795 Vimanapura Post 4800 Oak Grove Dr. Bangalore -560017 Pasadena, CA 91109 [email protected] 818 -354 -4605 Peter.Xaypraseuth @jpl.nasa.gov Abstract — NI SAR would be the inaugural collaboration frequency (L - & S -Band) space -based SAR mission to between National Aeronautics and Space Administration monitor the changes in the earth system over a period of (NASA) and Indian Space Research Organization (ISRO) on three years and ISRO has specified the mission life of the an Earth Science mission, which would feature an L -Band spacecraft as five years . This flagship par tnership would SAR instrument and an S -Band SAR instrument. As partners, have major contribut ions from both agencies. NASA would NASA an d ISRO would each contribute different engineering elements to help achieve the proposed scientific objectives of be responsible for providing the L -Band SAR payload the mission. ISRO -Vikram Sarabhai Space Centre would system in which the ISRO supplied S -Band SAR payload provide the GSLV -Mark II launch vehicle, which would would be integrated to define the complete science payload. deliver the spacecraft into the desi red orbit. ISRO -Satellite In addition , NASA wo uld provide engineering payloads for Centre would provide the spacecraft based on its I3K the mission, including a Payload Data Subs ystem, High -rate structural bus , a commonly used platform for ISRO ’s Science Downlink System , GPS receivers and a Solid State communication satellite missions, which would provide the Recorder .